船载卫星遥感数据接收天线跟踪精确度改进方法
2019-05-10陈元伟张国梁戎景会
陈元伟 张国梁 戎景会
(航天恒星科技有限公司,北京 100095)
目前,国外的船载遥感卫星数据接收系统使用较多的主要是美国和法国,多用于接收中低码速率的极轨气象卫星数据,频段多设定在X、L、S频段,用于卫星数据的接收和解调。由于遥感卫星分辨率和数据传输速率不断提高,这种船载小型接收站已经不能满足数据接收需求,国外大型舰船已经开始着手建设可以接收多种遥感卫星的大型接收系统。
由于海上环境恶劣,船的航行、摇摆、旋回、振动和颠簸等都会使船的位置和姿态不断地变化[1],造成天线跟踪精度下降,甚至造成跟踪目标丢失。此前,我国建设的移动卫星遥感数据接收系统主要是车载站,天线口径一般不超过6 m,并且在跟踪接收卫星影像数据时,左右摇摆适应范围较小。我国的远洋测量船安装了卫星测控天线,主要接收卫星下传的S频段遥测数据。由于X频段比S频段的波束窄,对天线指向精度要求更高。我国雪龙号科学考察船每年往返南北极进行科学考察,航行过程中需要及时了解气候和海况变化。尤其航行经过的西风带海域台风频发,需要依据接收到的卫星遥感数据,选择合适的航线来规避潜在的风险。在极地地区的海冰分布不断变化,雪龙号需及时根据海冰分布情况不断调整优化航线。此前,在海上和极地地区航行,主要利用通信卫星接收地面系统转发的卫星遥感数据进行分析,不但成本高,而且实效性不强,难以满足应用需要。在雪龙号上建造大型遥感卫星数据接收系统(7.3 m天线),可以实时接收过境卫星下传的X频段高分辨率遥感影像数据,实现数据的快速落地和应用,为极地考察提供服务。其次,雪龙号航行要经过西风带,船行过程接收卫星影像数据不但需要克服船行影响,还需要克服左右20°的摇摆。因此船载接收系统建设需要在天线质量大、响应慢、环境恶劣、X频段跟踪指向精度要求苛刻条件下,解决对卫星稳定捕获跟踪的难题。
本文介绍的设计方法主要是利用天线座架灵活性设计和隔离船摇的天线伺服控制设计方法解决上述难题,该方法在雪龙号建设中得到了应用和验证,提升了我国在大型船载遥感卫星数据接收系统建设的能力。
1 使用环境要求
卫星遥感数据船载接收系统需要X频段低轨遥感卫星(轨道高度300~1500 km)具有全半球自动跟踪能力,保证过顶跟踪不丢失目标。在海洋特殊环境下,船载接收系统须满足如下使用要求。
(1)摇摆适应性。正常航行时,船摇±5°;西风带区域航行时,船摇(-22~-20)°或(+20~+22)°;船摇周期17~18 s。
(2)抗风。稳态7级(17 m/s)、瞬态8级(22 m/s),设备应能正常工作;恶劣海况下,即风速12级(≥32 m/s),设备应固定不受损坏。
2 船载卫星遥感数据接收天线跟踪精确度改进方法
在海洋环境下进行卫星数据接收任务时,船摇对天线指向精度及跟踪精度影响很大[2]。由于海浪的影响,船载天线在跟踪和对准目标时,船体的摇摆使得天线座的姿态发生变化,导致天线无法实时对准目标,影响天线的跟踪及指向精度[3]。船行过程中,船摇隔离能力是影响船载数据跟踪接收系统对X频段低轨卫星全空域、无盲区跟踪和船摇过程中可视区域内的高精度指向跟踪的主要因素。船摇隔离设计就是克服船姿扰动对天线跟踪的影响,使天线可以准确指向目标位置,从而达到高精度、高速度跟踪目标的目的[4]。
本文的设计方法是选择高机动性能力天线,利用控制回路对天线进行控制,提升船载天线跟踪系统的船摇隔离能力,从而提高船载跟踪接收天线对X频段遥感卫星跟踪的精确度。
2.1 天线灵活性设计
在船摇情况下跟踪快速运动目标要求船载天线具有高灵活性,天线座架结构是影响天线跟踪卫星灵活性的主要因素,必须能够有效地隔离船摇。要实现船载全空域无盲区跟踪,还要满足船平台对尺寸、质量、环境适应性的要求。对目前常用的6种天线座架形式,以7.3 m口径天线为例进行比较(见表1)。

表1 不同类型天线座架对比Table 1 Comparison of different types of antenna mount

续 表
根据表1的比较结果可知,AZ-EL型天线座架不具备过顶跟踪能力,特别是在船摇情况下,由于复杂的海况使天顶跟踪具有不确定性。只能选取AZ-EL+C型座架。从结构上考虑,AZ-EL+C型在结构上要复杂一些,要比X-Y形式多一套转动系统、驱动系统及轴角输出。从性能上考虑,X-Y型座架跟踪盲区在X轴轴向两头方向上,不适应船载情况,结构也不如A-E座架紧凑。
综合分析,AZ-EL+C型座架能够适应船载站对低轨目标的连续过顶跟踪要求,同时也能适应同步卫星的跟踪要求。针对AZ-EL+C型座架,在最极端情况(卫星正过顶)下,伺服指标估算统一按目标轨道高度300 km,船摇横摇按±22°,船摇横摇周期为17s伺服,采样率为40 Hz计算。将船摇按照正弦曲线进行模拟,位置-速度-加速度变化曲线见图1。
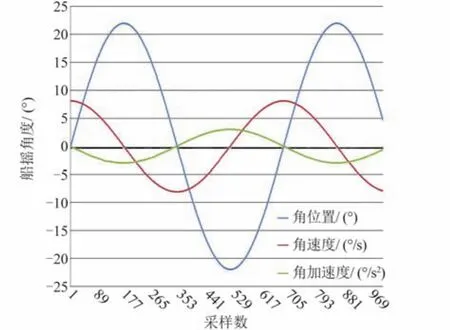
图1 船摇条件下的速度、加速度仿真曲线Fig.1 Velocity acceleration simulation curve under vessel shook
根据图1可知:横摇最大速度为8.117(°)/s,加速度为3(°)/s2。取目标轨道高度h=300 km,目标的线速度为

式中:μ为地球引力常数,μ=3.986005×1014m3/s2;Re为地球半径,Re=6 378.140 km。
正过顶的情况下,直接将线速度转换为俯仰或交叉C轴的角速度为

加速度很小,可按1(°)/s2确定。
根据上述计算结果,选取的AZ-EL+C型天线座架的动态性能见表2,完全能够满足低轨卫星的跟踪需求。

表2 选择天线产品伺服的机动性能指标Table 2 Maneuverability indicator of the antenna servo
2.2 船摇隔离设计方法
目前,常采用陀螺稳定和前馈稳定两种策略隔离船摇对天线伺服系统的影响[5]。通过敏感由船摇所产生的俯仰角速度及横倾角速度,利用稳定回路设计使天线产生一个与船摇相反方向的运动,保持天线在空间的指向不变[6-7]。
本文采用的是使用陀螺稳定隔离船摇、船摇前馈补偿和自跟踪控制等多种技术手段控制天线稳定指向的方法。通过将两个正交速率陀螺安装在天线俯仰叉臂上,分别平行于俯仰轴和横倾轴,敏感由船摇所产生的俯仰角速度及横倾角速度,将这些信息负反馈到回路中,实现速率陀螺稳定控制,以克服船体摇摆对跟踪的影响。利用船上的光纤陀螺罗经测量出船体的3个转动自由度的转角等船姿信息,经坐标变换计算出在船摇下的天线甲板坐标系的控制角度。这些信息经计算机处理后提前计算出甲板方位、俯仰轴的船摇角速度,实现对船摇的前馈控制。其中陀螺稳定环和自跟踪环的信号处理基于偏差控制,并采用频率域的方法进行设计校正。陀螺稳定环、自跟踪环设计为典型的2阶系统,在计算机内完成校正运算后对大小信号的模型变化,及调节器的积分项进行补偿。为了减小动态滞后误差、提高船摇隔离度指标,设计的陀螺稳定环、自跟踪环具有较高的开环放大倍数和较快的动态响应能力。环路带宽做得宽,开环增益做得高,就能获得较高的船摇隔离度。采用这种隔离船摇的方法,船摇隔离度是陀螺环隔离度和跟踪位置环隔离度两项之和,因而比单纯的位置环隔离度要高。此方法适合于要求跟踪速度快、船摇隔离度高的场合。
船遥隔离度用来衡量回路对于船摇扰动抑制的程度,即没有船摇稳定措施时天线的摇摆角度与有船摇稳定措施时天线剩余摇摆角度之比值,度量隔离度用分贝(d B)表示[8]。本方法环路隔离船摇稳定结构如图2所示[9]。

图2 环路隔离船摇稳定结构方框图Fig.2 Structural diagram of vessel stability
对船摇速度扰动量f产生的误差传递函数可以表示为

式中:D(S)为速率陀螺开环传递函数,D(S)=B(S)-C(S);E(S)为自跟踪位置环开环传递函数
根据船摇隔离度定义,可以推导出系统总隔离度为

式中:L1为陀螺环船摇隔离度,L1=-20lg[1+D(S)];L2为位置跟踪环船摇隔离度,L2=-20lg[1+E(S)]。
当船摇为低频扰动时,船摇隔离度主要与船摇频率点处的陀螺开环增益、位置跟踪环开环增益有关,船摇周期为17 s,频率为0.52 rad/s,根据前面环路设计参数,计算可得:L1>20 dB,L2>20 dB。
根据工程经验,采用船摇速度前馈技术,船摇隔离度(L3船摇速度前馈隔离度)可增加8 dB以上,本方案系统船摇隔离度可以达到:

3 工程应用
3.1 天线控制设计
船载天线伺服系统以AZ-EL+C轴座架为控制对象,每轴均可选择设置位置环、陀螺环、速度环、电流环,完成对角位置的闭环控制。通过船上的光纤陀螺罗经测量出船体的3个转动自由度的转角等船姿信息,经坐标变换计算出在船摇下的天线甲板坐标系的控制角度,以实现对同步卫星以及低轨遥感卫星目标全空域的可靠捕获及稳定跟踪。同时光纤陀螺罗经提供的船姿信息,伺服系统编码器能实时提供目标在甲板坐标系中的位置,这些信息经计算机处理后可提前计算出甲板方位、俯仰轴的船摇角速度,实现对船摇的前馈控制,提高船摇隔离度。
3.2 天线捕获跟踪控制流程设计
天线控制的根本目的就是实现对目标的快速捕获及精确跟踪,并使之达到系统要求的跟踪性能和跟踪精度。采取合适的控制模式抑制扰动使天线快速、稳定跟踪目标是系统抗扰动设计的核心[7]。本方法采用复合控制技术等,实现大范围调转天线、快速展开与捕获目标和高精确跟踪等功能的控制策略。天线自动跟踪功能采用“俯仰与交叉C轴跟踪+方位随动”的跟踪模式,能够适应各种复杂情况下的卫星跟踪,如隔离船摇、卫星过顶跟踪、低仰角跟踪等。具体控制流程如下(见图3):
(1)系统管理计算机根据卫星轨道根数和实时接收船用惯导设备送来的船姿船位信息,实时计算天线对过境卫星的轨道预报数据(大地系方位、俯仰引导角度),送天线控制单元。
(2)天线控制单元根据过境卫星的实时轨道预报数据、实时船姿船位信息,经坐标变化后,将大地系引导角度数据转换为甲板测量系角度数据(方位角、俯仰角),控制天线3个轴转动到甲板座标系的预置等待点。
(3)目标出现后,当满足捕获门限条件时,实现对卫星目标的自动捕获。目标捕获后,转入俯仰与交叉C轴自动跟踪模式,对目标进行连续跟踪。
(4)在天线对目标的连续跟踪过程中,天线轴角偏码设备对天线轴的转角实时编码、显示、处理并送至系统管理计算机,以完成对测量数据的处理。

图3 天线捕获跟踪信息流Fig.3 Antenna captures the tracking information flow diagram
3.3 应用情况
本文的设计已在雪龙号船载卫星遥感接收处理系统得到应用,该系统是我国建设的首个大型船载遥感卫星数据接收系统。雪龙号船载卫星遥感接收处理系统伺服船摇扰动隔离度达到48 dB。经测试在船摇(-22~-20)°或(+20~+22)°,船摇周期17~18 s条件下,天线指向误差≤0.1°,伺服指向误差≤0.05°(见图4)。

图4 雪龙号船载卫星遥感数据接收系统实物图Fig.4 Picture of the shipboard remote sensing data reception system of XUELONG
2015年该系统开始运行,至今已随雪龙船参加了第32、33次南极考察,第7、8次北极考察。该系统在瞬息万变、环境恶劣的极地大洋中提供了最准确的数据,结合航行动态系统,等于为雪龙船量身定做了一套活地图[10]。在此期间,系统获取的实时遥感数据,为“雪龙”船在冰区航行提供实时云图和冰情信息,助力“雪龙号”科考船成功从南极浮冰围困中突围,确保了极地科考任务按计划顺利完成。通过雪龙船试航和南极考察对船载接收系统效果进行了验证,充分证明了船载接收系统设计的稳定性和可靠性。
4 结束语
本文提出的卫星遥感数据接收系统的精准跟踪设计方法,面向舰船特殊需求,采用了AZ-EL+C轴优化设计的座架,伺服控制采用陀螺稳定隔离船摇、船摇前馈补偿隔离船摇和自跟踪隔离船摇等多种手段,使系统船摇隔离度达45 dB以上,天线指向误差≤0.1°。经过工程验证,该设计方法可以实现对X频段低轨卫星全空域无盲区跟踪和船摇过程中可视区域内的高精度稳定指向跟踪。本文的设计方案同样适用于机载、车载等其他移动设备装载的卫星遥感数据跟踪接收系统,具有良好的工程实用价值和较大应用前景。