《焊接机器人技术》能力本位的整体教学设计研究
2019-05-08王丽七
王丽七
(安徽国防科技职业学院 机械技术学院,安徽 六安 237011)
长期以来,“能力本位”职教理念是高职院校坚持和落实的职业教育理念,符合职业教育的客观规律,具有其先进性和科学性,为现代职业教育的发展指明了方向。2014年5月2日国务院颁布了《关于加快发展现代职业教育的决定》的文件,2014年6月16日,国家政府部门印发了《现代职业教育体系建设规划(2014—2020年)》的文件。可见“能力本位”的职业教育越来越受到相关部门的重视和关注[1-3]。
随着制造业的迅速发展,焊接技术的应用越来越广泛,焊接智能化水平也越来越高,采用机器人焊接已经成为焊接技术自动化的主要标志[4]。但是,具有扎实焊接专业知识的机器人操作人才却十分稀缺,限制了我国机器人应用技术向更大程度的发展,因此,在高职院校开设《焊接机器人技术》课程,并进行能力本位视域的教学设计与改革是非常重要的。本文结合我院焊接技术与自动化专业培养目标,探析了基于能力本位的《焊接机器人技术》课程的教学目标、教学内容、教学情境、考核方案等内容,以期进一步提高课程的教学效果,提高学生的职业能力与素质。
1 能力本位的教学设计思路
能力本位教育更注重学生职业技能的培养,在教学过程中更多地强调学生的任务演练,鼓励并引导学生积极参与其中,采取以学生为主体、教师为主导的教学模式,以岗位职业能力的培养为重点,强化培养学生工程实践能力[1]。为适应能力本位教学要求,在教学设计时,首先根据专业岗位群对学生岗位能力的需求,结合专业人才培养目标,确立能力本位的课程目标,然后分析岗位具体工作过程,明确岗位典型工作任务,然后整合教学内容,设计相应的训练项目及目标体系。课程设计思路如图1所示。其中,项目设计要体现一定的趣味性挑战性,激发同学们自主学习和探究兴趣。并且,每一个子项目或任务均要设计了相应的考核方案和评分细则,有助于客观评价教学效果和学生的职业能力。
2 能力本位课程目标
与课程密切相关的岗位主要有:焊接机器人操作员、焊接机器人调试与编程员、自动化焊接生产线技术员、焊接自动化生产线调试与管理员等。根据典型工作任务(如图2)能力素质需求分析,结合我校实际,本课程的课程目标确定为以下三方面:
(1)能力目标:能够对焊接机器人基本线路进行连接、维护保养、安全操作与调试;能根据产品任务书进行分析并设计工艺路线;能独立运用示教器进行机器人轨迹规划与示教再现;能够独立完成四种常见典型接头(板对接、T形接头、管板对接、管管对接)及简单构件的机器人焊接;能够对常见事故进行分析与解决,灵活应对突发事件。
(2)知识目标:了解弧焊机器人系统的4大基本组成部分及其功能和作用及其结构控制原理;掌握焊接机器人安全操作规程及日常检查和保养常识;掌握ABB1410焊接机器人示教器面板操作及焊接机器人系统的基本操作;熟练掌握基本轨迹的示教再现要点(示教点的插补方式、示教速度设置、空走点和焊接点的设置,直线、圆弧和及其摆动程序的编写方法、焊接工艺优化等)。
(3)素质目标:培养积极主动的学习态度、应用信息化技术等手段自主学习的能力;培养任务施工图的领会能力和执行力,评价与总结能力,创新能力等;培养较强的表达能力、人际沟通能力、团队协作能力、克服困难的能力;培养安全、质量、责任、环保等岗位意识。
3 能力本位的整体教学设计方案
3.1 教学内容与时间轴设计
整个教学过程以完成涡轮减速器箱体的机器人焊接项目为载体,根据项目完成的工作过程,将《焊接机器人技术》课程的教学内容整合为焊接机器人焊前准备、焊接机器人在线操作、机器人焊接生产三大模块,表1为各部分具体项目与学时分配。
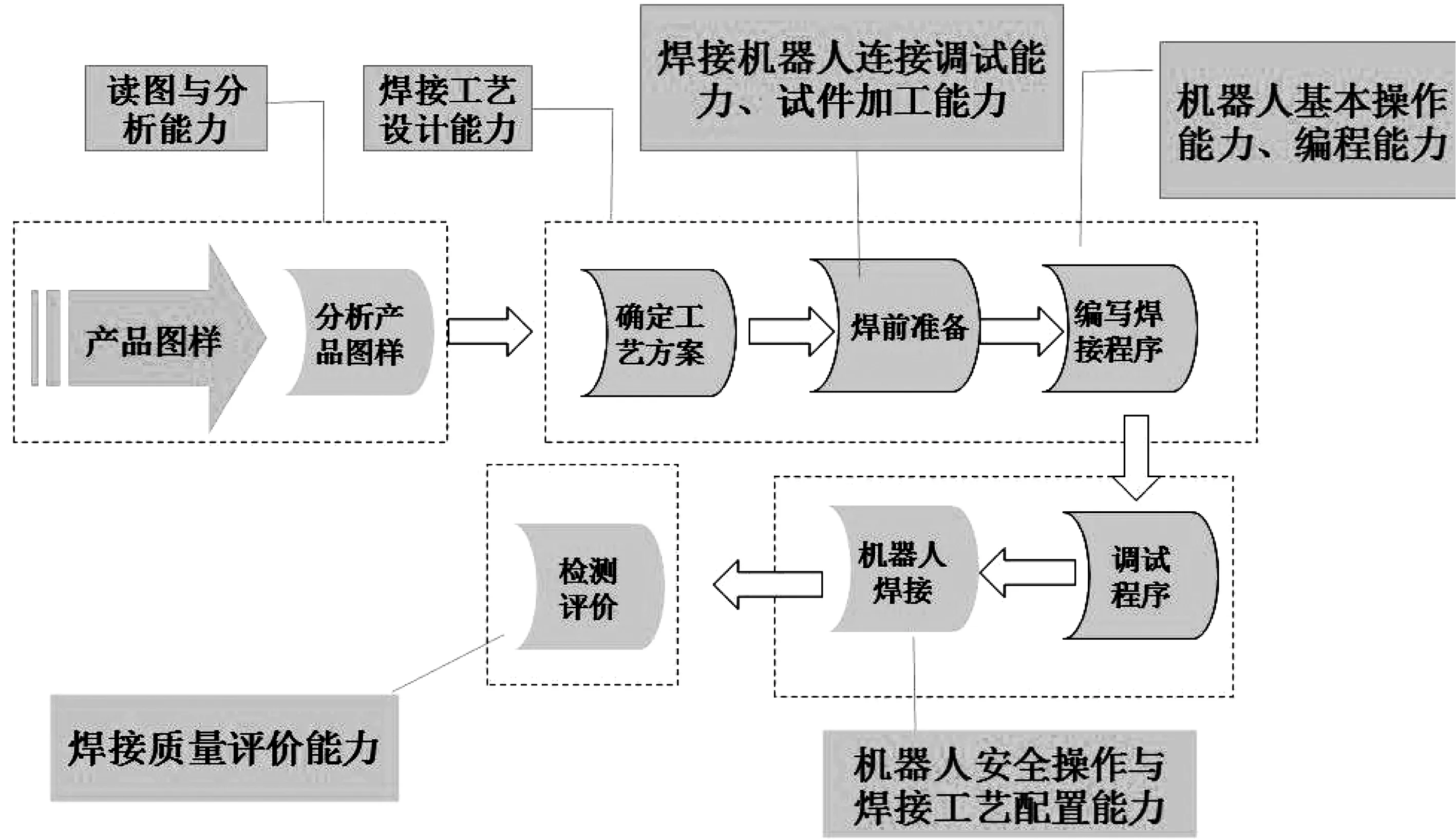
图1 机器人焊接生产工艺流程与能力要求
我校焊接专业本课程总学时为84,一共14周,每周6学时,一般在第4学期开设,其中第一次课主要是课程介绍,情景引入并认识实训室焊接机器人。最后一次课主要是课程总结,包括基本的概念,基本知识点与技能点,常用的英文单词等。
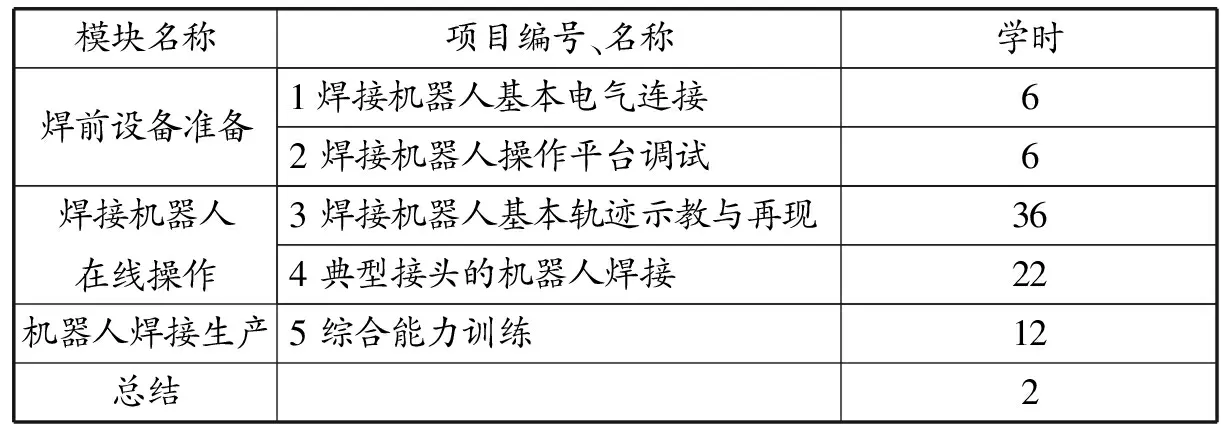
表1 教学内容与学时分配
3.2 教学情境设计
本课程教学始终以职业能力培养为核心目标,采取“教、学、做”一体化的教学模式,课堂教学均在校内实训基地内进行。实训基地配有多媒体教室,老师教学时可以借助多媒体展示原理、演示动画和视频等。实训基地机器人焊接区有用于教学的ABB1410焊接机器人系统及焊接所需的各种耗材和保障设施,可以让同学们学中做,做中学,不断提高自身的能力和素养。具体教学情境:每一堂课一般有三个环节,第一个环节主要是老师示范与讲解,并告知学生确本次课的任务目标、基本的知识点和技能点。第二环节是同学们学操任务,任务难度与老师示范的任务相当,主要是同学们分组训练,要求同学们积极主动学练,相互协作完成任务并进行互动点评,老师可以进行个别的指导和点评,并鼓励同学们大胆创新。该环节以学生为主体,所需时间一般为课堂时间的2/3以上,让同学们在完成具体工作任务的过程中不断提高职业能力与素养。第三环节是任务考核,要求同学们在规定时间内完成所给的工作任务,老师根据具体的评定标准对同学们任务完成情况进行评价,最后老师可根据学生任务完成情况,布置一定的课外任务,由学生课余时间在实训基地内完成。
由于课堂时间有限,为进一步拓展同学们的职业能力,激发探究兴趣,我们还组建了焊接机器人科技社团,定期开展技能竞赛,竞赛项目具有代表性(体现能力目标)、趣味性和挑战性,可以丰富同学们的课外学习生活,进一步拓展专业能力。
3.3 课程考核设计
本课程考核有两种方案,均以过程性考核(能力考核)为主。方案一:过程考核(70%)+期末考核(30%)。期末考核分两部分,一部分是根据综合考核项目完成情况进行评价(15%),另一部分为理论考试(15%),理论考主要考察基本的概念、知识点和操作规范等。方案二:过程性考核(70%)+技能竞赛成绩(30%),推行以赛促学,以赛代考制。凡参加焊接机器人科技社团,并表现良好,期末可申请免考,总成绩可直接认定为70-80分。凡参加校内举办的焊接机器人技能竞赛获一等奖者,总绩直接评定为90分以上,获二等奖者,总成绩直接评定为85-89分,获三等奖者期末成绩评定为80-85分。同学们课根据自身情况,选择一种或两种方案,并按高分计入。
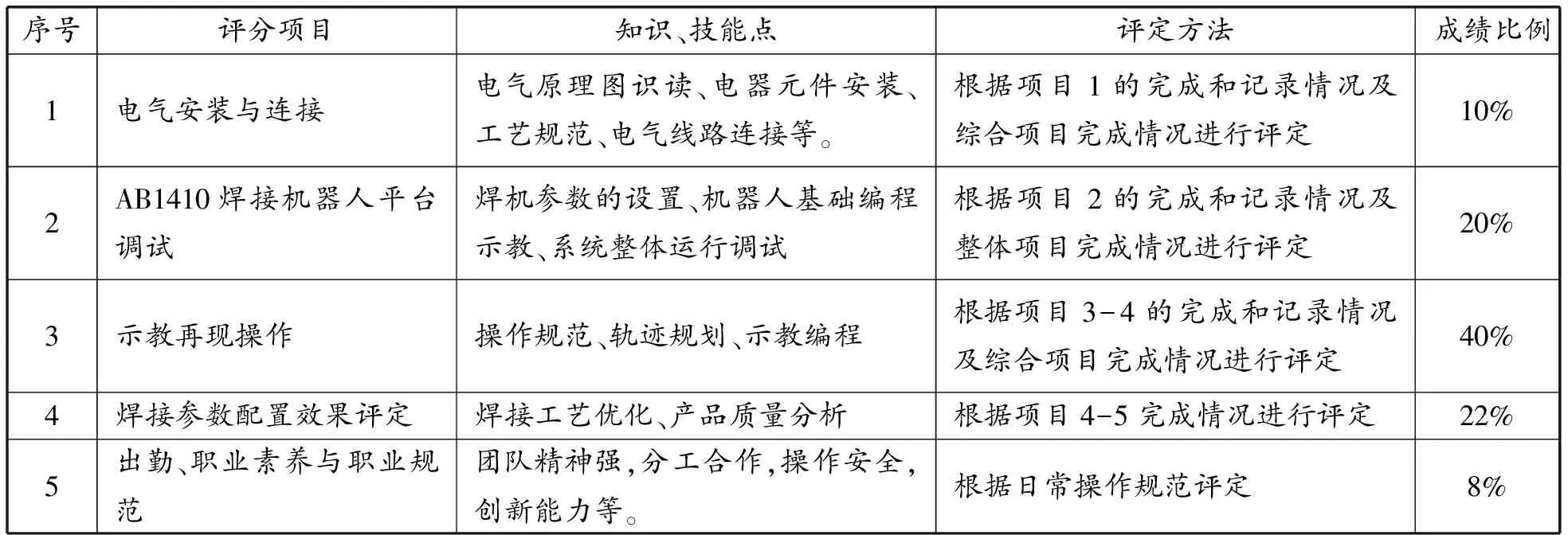
表3 过程考核与技能竞赛成绩分布与评定细则
4 结语
基于能力本位的《焊接机器人技术》课程整体教学设计是实施能力本位教学改革的前提和必要手段。该设计以提升教学质量,培养学生的职业能力为核心,从分析岗位能力入手,结合专业人才培养目标,落实能力本位的课程目标,然后根据课程目标设计教学内容、项目任务、教学情境与考核方案。基于能力本位的教学设计思路和设计要点可以引导教师改变传统执教观念,创新教学方法,激发学生自主学习能力和创新能力。《焊接机器人技术》课程整体教学设计方案是教师进一步实施教学改革,进行该课程教学单元设计的依据。该设计是结合我校实际教学条件和学生学情而设计的,具有可实施性,在今后的教学实践中,教师还需根据具体情况进行一定的优化。
