基于机器视觉的动态环境下小尺寸轴检测系统*
2019-05-07丁成波
丁成波,刘 蜜,刘 超
(贵州航天电器股份有限公司,贵阳 550009)
0 引言
继电器产品上有一种带有台阶的小尺寸轴,它是继电器的关键部件之一,其尺寸制造精度以及工作性能的优劣对整套继电器产品的使用状况和寿命起到了关键性的影响[1-2],因此,为了保证该轴的质量以及方便后期工序零件的配对和加工,需要对该小尺寸轴进行质检。目前国内外普遍使用传统的打表法等手段进行检测,其检测精度、速度难以达到要求,检测成本也相对较高;而且劳动强度较大,检测人员易疲劳,经常会出现错检,影响了产品质量[3-4],给后期的继电器装配及安全带来了潜在的安生隐患。随着CCD、CMOS等光学传感器和图像处理算法的迅速发展,机器视觉因其具有柔性化、非接触性和精度高以及自动化度高的优点逐渐成为了现代检测技术中的新兴技术和主要检测手段[5-7]。
介于此,本文设计了一种基于机器视觉的小尺寸轴检测系统,该系统不仅可以自动检测轴的尺寸,减少人为误差,而且提高了测量准确度和精度,同时还实现了动态测量,提升了产品质量和提高了生产效率。这为实现该类小尺寸轴的动态检测提供了理论依据和检测思路。
1 系统组成
系统硬件主要包括计算机、CCD相机、镜头、光源以及机械手爪、小尺寸轴载台等。系统检测过程主要采用动态环境下的轴尺寸计算方法和环境变化实时监控方法。检测过程中对动态环境下的干扰进行了实时监控和及时报警,避免检测过程中因环境干扰而导致对小尺寸轴的误测。
本系统的机器视觉检测流程主要包括图像采集、图像处理、轴尺寸计算以及结果输出4部分,如图1所示。

图1 系统检测流程框图
首先CCD 相机通过连续拍照的方式采集轴的图像信息并将该信息传输至计算机,然后检测系统经过图像预处理、查找表、图像二值化以及边缘特征提取等图像处理技术对图像信息进行分析和处理,提取轴的边缘特征,最后通过最小二乘法拟合轴边缘直线并计算出轴的相关尺寸。本检测系统中,相机采用的是某公司的 CCD 工业相机,镜头选用日本某公司生产的工业镜头。光照系统采用上海某科技有限公司生产的平行背景光源,该光源添加了平行光镀膜,其发射光接近理想平行光。
2 基于机器视觉的图像处理
基于机器视觉的图像处理过程如图2所示。

图2 图像处理过程
2.1 相机标定
相机标定的目的是为了获得相机成像平面上的像素点和现实世界中的实际点的对应关系,它主要是通过相机模型来实现的,从模型中得到的一些参数为相机参数[8]。因为相机标定的精确程度关系到后期边缘特征提取的稳定性,尺寸检测的准确性,因此在进行图像处理之前必须先进行相机标定。
本检测系统对相机的标定通过CCD相机对4种不同尺寸的标准轴进行拍照,接着选取15张不同角度的图像进行分析和处理,然后逐一对相机进行标定和矫正,最后得到相机转化成物理尺寸的比例系数。
2.2 图像预处理
图像采集过程中往往会受到检测零件表面质量以及外界环境的影响,图像信息也因此会受到或多或少的噪声干扰或图像质量不是非常好的情况。这些干扰或者低质量的图像如果不经过处理,将会对后期图像处理和特征提取产生较大的影响。因此,在进行图像处理之前需要对图像进行预处理,以便得到高质量的图像。本检测系统主要对图像进行了查找表、滤波等预处理。
查找表主要是用来提高图像的对比度和亮度,其实现思想是:若原始图像的对比度较低时,可以将原始图像的灰度级值转换到另一个灰度级值得图像,以提高图像的对比度。图3显示了应用查找表前后的对比图。

(a)轴原始图像

(b)轴头部原始图像 (c)轴头部查找表后的图像 图3 应用查找表前后的对比图
滤波是在不损坏图像的轮廓信息的情况下抑制干扰噪声,保证图像清晰和较好的视觉效果。根据所获取图像噪声的特点,选取中值滤波来消除或减轻图像的噪声[9]。中值滤波是用像素点领域灰度值的中值来代替该像素点的灰度值,这种方法在去除脉冲噪声、椒盐噪声的同时又能保留图像的边缘细节,它属于非线性滤波的一种。设F(x,y)为原图像点(x,y) 的灰度值,G(x,y)为图像滤波后的灰度值,则有:G(x,y) =Median{ (x-m,y-n,m,n∈A},其中,A为滤波窗口。本系统采用了中值滤波方法来进行图像处理,其处理前后的对比效果图如图4所示。
(a)轴头部查找表后的图像 (b)轴头中值滤波后的图像 图4 应用中值滤波前后的对比图
2.3 图像二值化
图像的二值化处理是使被测图像中有用信息点与背景的对比度达到最大,突出了有用信息点,进而形成一幅灰度值只有0和1图像的处理算法[10]。其实现可以按照公式(1)进行。

(1)
其中,F(x,y)是图像中像素点的灰度值,T为最优阈值。
图5是小尺寸轴二值化后的图像。

图5 二值化后轴的图像
2.4 图像边缘几何特征提取
本文中对小尺寸轴边缘几何特征的提取采用了Hough变换算法来检测直线。Hough变换是将直线上每一个数据点变换为参数平面中的一条直线或曲线,利用共线数据点对应的参数曲线相交于参数空间中一点的关系,使直线的提取问题转化为计数问题[11]。直线的参数方程为:L=Xcos(A)+Ycos(A),其中,L是原点到直线的垂直距离,A是从原点到直线的连线与水平线的夹角。使用这个参数就可以把一个点(X,Y)转换成(L,A)的关系或者Hough空间上的一条正弦函数。图6是通过Hough 变换查找直线的方法提取到的轴和槽的边缘直线。

(a)轴直径上边缘特征

(b)轴直径下边缘特征

(c)槽直径上边缘特征

(d)槽直径下边缘特征 图6 轴和槽的边缘几何特征
3 动态环境下的轴尺寸计算
3.1 静态环境下轴、槽直径和同轴度检测
在计算轴的各项尺寸时是通过最小二乘法拟合各个直线段,进而得到相应的尺寸。以轴直径测试为例,设拟合的轴边缘的两条直线方程为:
y1=k1x1+b1
(2)
y2=k2x2+b2
(3)
按照最小二乘法原理计算出k1,b1,k2,b2:
(4)
(5)
(6)
(7)
式中,(xi,yi),(xj,yj)分别是小尺寸轴两边缘上的像素坐标,m,n分别为拟合的总数。通过不断修正参数使得两条线平行,使得K1=K2=K,进而计算出两条直线之间的距离φD1:
(8)
进一步地,通过图像处理得到轴和槽中心线上的像素坐标,如图7所示。

图7 轴和槽的拟合中心线
取小尺寸轴的中心线作为基准线,并用最小二乘法拟合得到直线方程,如式(9)所示,计算槽中心上任意点(xk,yk)到基准线的距离,并将该最大值乘以2即是两者的同轴度∂,如式(10)所示。
y3=k3x3+b3
(9)
(10)
根据以上原理测得静态环境下轴的尺寸如表1所示。
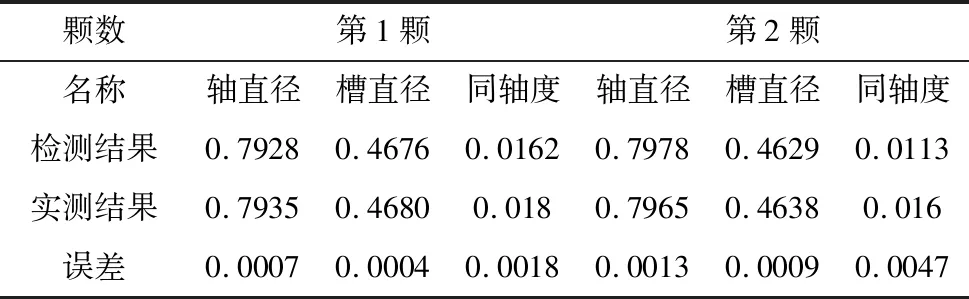
表1 静态环境下轴尺寸的测量结果(单位:mm)
从表1中可以得出,第一颗小尺寸轴的轴、槽直径以及同轴度检测结果与实际测量结果的误差分别为0.0007mm,0.0004mm, 0.0018mm;第二颗小尺寸轴的轴、槽直径以及同轴度检测结果与实际测量结果的误差分别为0.0013mm,0.0009mm, 0.0047mm。通过分析该检测结果与实际测量相符合且达到了工作要求的精度。
3.2 动态环境下轴、槽直径和同轴度检测
在对小尺寸轴进行静态检测的基础上,利用CCD相机分别对不同角度的小尺寸轴进行了动态检测。小尺寸轴的一端用机械手夹紧,通过控制机械手以一定的速度旋转,CCD相机以一定的间隔时间采集图像。按照静态检测的方法,对采样的轴图像进行处理,得到在动态环境下不同角度的轴尺寸测量结果,并将该结果与人工测量的结果比较得到如表2的结果。
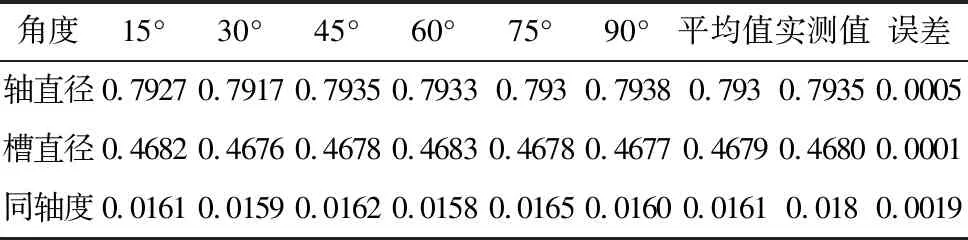
表2 动态环境下轴尺寸的测量结果(单位:mm)
从表2中可以得出,不同角度下的测量值均接近实际值,其轴、槽直径以及同轴度的平均值与实际测量值的误差分别为:0.005mm,0.001mm,0.0019mm。由此可见,动态检测结果相比静态检测结果更加符合实际的要求,精度更高。
3.3 环境变化实时监控及报警
在实际检测过程中因小尺寸轴的尺寸过小往往会受到环境中的灰尘以及其他杂物影响,因此,本系统在进行检测前添加了一根气管对小尺寸轴进行去杂物的
处理,确保了小尺寸轴表面没有附着物。除此,在检测过程中周围环境的光照也会对检测系统产生一定的影响,尤其是在进行尺寸检测时,当光照发生变化时会使得图像的一些像素的灰度值发生改变,使得边缘几何特征缺损,最终使得测量尺寸错误。为解决这类问题,本检测系统设置了一个报警系统:即对该系统中小尺寸轴所占的像素值总数设置了一个阈值,在实际检测过程中,当小尺寸轴的像素值总数超过了该阈值时则弹出报警界面,用户根据实际情况清除报警后才能够继续对小尺寸轴进行检测。图8为环境光源变化时的状态图。

图8 环境光照变换时的图像
4 结论
针对小尺寸轴零件的尺寸检测,开发了一种基于机器视觉的轴尺寸检测系统。该系统经过图像查找表、滤波、图像二值化以及边缘提取等图像处理技术,采用轮廓分析方法计算了静态环境下的轴直径、槽直径以及同轴度,同时提出了一种动态环境下的轴尺寸计算方法和环境变化实时监控方法。实验结果表明,动态环境下的检测结果相比静态环境下的检测结果更加符合实际的要求,精度更高。进而反映了该系统检测结果稳定性强、检测精度高,完全满足实际生产应用的要求,具有良好的实用价值。这为类似的小尺寸轴检测提供了理论依据和检测思路。
