基于敏感度分析的三轴转台关键误差源辨识
2019-05-07康跃然傅亦源刘鹏军肖本龙牛凤梁赵明洋
康跃然,傅亦源,刘鹏军,肖本龙,牛凤梁,赵明洋
(中国洛阳电子装备试验中心,河南 洛阳 471003)
0 引言
三轴转台主要用于模拟飞行器、导弹等在实际飞行过程中的运动姿态变化,验证和评估其制导及控制系统的性能[1],是半实物仿真系统中的重要组成部分。但受加工装配准确度以及校准精度的影响,转台不可避免的会产生各种误差分量,由此造成的综合性指向误差将直接影响仿真试验结果的精度。由于三轴转台指向误差涉及的误差源较多,每一个误差环节对最终精度的影响程度不同,且各因素间相互耦合关联,这都给转台关键误差源的辨识造成了困难。因此,如何在设计阶段有效分析出各误差源对指向误差的影响程度,识别其中的关键因素,这对合理分配各误差项,减少三轴转台指向误差,进而提升仿真试验精度具有重要的意义。
国内外学者在转台精度分析方面进行了大量的研究。Alasty A等[2]在进行三轴机构误差建模的过程中采用了Denavit-Hartenberg变换方法,对影响最终指向误差的各误差分量进行了分析研究;孙致月等[3]基于五轴转台结构及运动机理,采用特征矩阵描述转台误差传递关系,建立了五轴转台误差模型,研究结果表明指向误差主要受垂直度、倾角回转误差及转角影响;文献[4]采用旋转四元数理论建立了针对方位俯仰转台的指向误差理论模型,并通过参数辨识的方法分析出关键误差参数。刘宏旭等[5]以两轴立式光电转台为研究对象,推导出包含各项结构误差的转台综合误差公式,并通过数值仿真获得了不同误差项对指向误差的影响结果。
由上述文献可知,目前针对三轴转台误差进行敏感度分析的研究相对较少。为此,本文提出了一种基于敏感度分析的三轴转台关键误差源辨识方法,以某三轴转台为研究对象,首先基于多体系统运动学理论建立指向误差模型,然后采用矩阵微分法推导出各误差源的敏感度系数表达式,最后通过计算转台完整运动周期下各误差源的敏感度系数,识别出对指向误差影响较大的关键性误差源,从而为三轴转台的精度分析与设计提供了理论依据和参考。
1 三轴转台指向误差模型
本文以某立式三轴仿真转台为研究对象,其结构简图如图1所示。
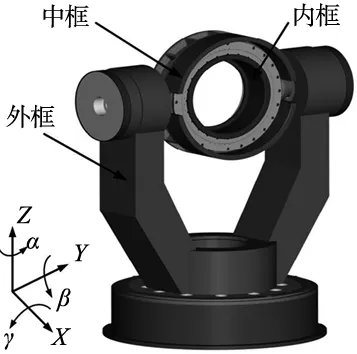
图1 三轴转台结构示 意图
该转台由外框、中框及内框等部件组成,整体结构呈U-O-O型。其中外框作绕z轴的偏航运动(转动角度α);中框作绕y轴的俯仰运动(转动角度β),内框作绕x轴的横滚运动(转动角度γ)。试验时,负载设备固定安装在转台内框上,其电轴与内框回转轴线重合。
基于多体系统运动学理论[6],依据三轴转台结构及运动特点,将其抽象为多个各运动部件,并依照它们间的固定连接关系构建如图2所示的开环链路结构。进一步在各运动部件上建立直角坐标系,这就构成了三轴转台拓扑结构。

图2 三轴转台拓扑结构图
建立三轴转台拓扑结构后,采用低序体阵列对其进行数字化描述,如表1所示。

表1 三轴转台低序体阵列
表中k为转台运动部件编号,L为低序体算子。三轴转台指向误差定义为设备电轴预期指向与实际指向间的角度偏差[7]。影响指向误差的误差源主要有垂直度误差、倾角回转误差等,如表2所示。
表2中垂直度误差以S(z1x0)为例,它表示图2中外框z1轴与基座x0轴间的垂直度误差;其余误差分量以εx(z1)为例,表示外框z1轴在转动过程中产生的在x方向上的角度偏差。
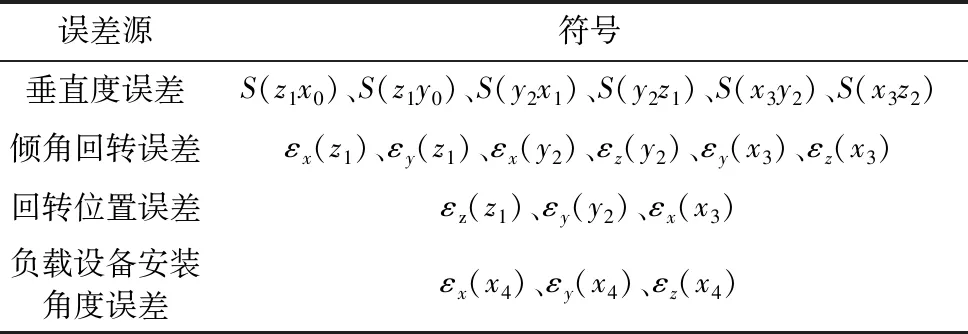
表2 三轴转台误差源
根据转台各相邻部件间的运动关系,进一步引入误差分量,可建立各相邻运动部件间的特征矩阵。以转台外框和中框为例,其特征矩阵为:
T12,p=I4×4
上述矩阵中带下标p、pe的分别表示两相邻运动体静止状态下的理想和实际特征矩阵,带下标s、se的表示运动状态下的理想和实际特征矩阵。


(1)
三轴转台不同姿态下负载设备电轴理想矢量pideal和实际矢量pactual的表达式为[9]:

(2)


(3)
2 误差源敏感度分析方法
误差源敏感度分析旨在研究各误差分量与最终精度之间的响应关系[11]。通过定义敏感度系数,可量化误差源对精度的影响程度,进而完成对关键因素的辨识。
根据已建立的三轴转台指向误差模型,采用矩阵微分法推导各误差源敏感度系数表达式。首先将转台指向误差模型显性地表示为:
E=F(G,R,U)
(4)
式中,E为转台指向误差矢量;G为误差源矢量:
G=(Δe1,Δe2……Δen)T
Δei为各误差源;R为负载设备电轴在负载设备坐标系中的位置矢量;U为转台的位置矢量:
根据式(4)可知,F是变量G、R、U的连续可微函数,因此可将其按一阶泰勒级数展开[12]:

(5)
式中,ΔG、ΔR、ΔU为各变量在其理想值处的微小波动量。实际分析过程中R、U可以看成固定值,因此去掉高阶项后可以将公式简化为:
(6)
则三轴转台指向误差的敏感度分析模型为:
(7)
式中,S为误差敏感度矩阵:
(8)
根据误差敏感度矩阵,可以定义三轴转台指向误差E对误差源Δei的偏导数绝对值Si为该误差源的敏感度:
(9)
通过矩阵微分法获得转台各误差源敏感度表达式后,为了更好地对比分析,将敏感度进行归一化处理,可获得各误差源的敏感度系数si:
(10)
3 关键误差源识别
基于公式和建立的误差源敏感度分析方法,可获得三轴转台指向误差各分量的表达式:
(11)
式中,
k1= -sβ·S(z1x0) + cα·sβ·[-εy(z1)-εy(y2)-
S(x3z2) + sγ·εz(x3)-cγ·εy(x3)]-sα·
[cβ·εz(z1) + sβ·εx(z1) +S(y2x1)·cβ+S(y2z1)·
sβ+εz(y2) +S(x3y2) + cγ·εz(x3) + sγ·εy(x3)]
k2= [cα·sβ·cγ+ sα·sγ]
k3= [cα·sβ·sγ-sα·cγ]
k4= sβ·S(z1y0) +sα·sβ·[-εy(z1)-εy(y2)-
S(x3z2) + sγ·εz(x3)-cγ·εy(x3)] + cα·
[cβ·εz(z1) + sβ·εx(z1) +S(y2x1)·cβ+S(y2z1)·
sβ+εz(y2) +S(x3y2)+cγ·εz(x3) + sγ·εy(x3)]
k5= (sα·sβ·cγ-cα·sγ)
k6= (sα·sβ·sγ+ cα·cγ)
进一步根据式(9)和式(11),可获得三轴转台各误差源的敏感度计算结果,如表3所示。
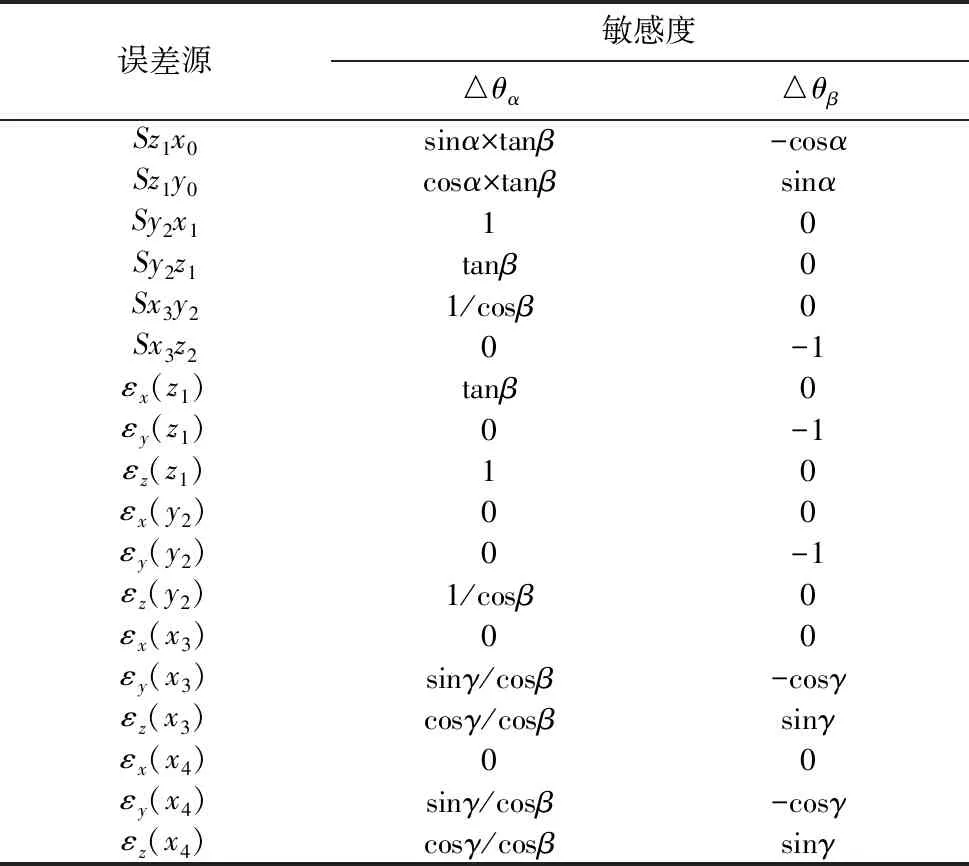
表3 三轴转台误差源敏感度
由表3可知,各误差源的敏感度与转台运动姿态有关。仿真试验中,由于三轴转台姿态的实时变化导致误差源的敏感度也是动态变化的。为了能对转台完整运动周期下不同误差源的敏感度进行综合分析,在转台实际运动姿态下(如图3所示),首先求解获得目标误差源在各个时刻的敏感度,然后对各时刻的敏感度进行平均值计算,最后再依据公式(10)进行归一化处理,就可以获得转台完整运动周期下该误差源的敏感度系数。不同误差源敏感度系数比较结果如图4所示。
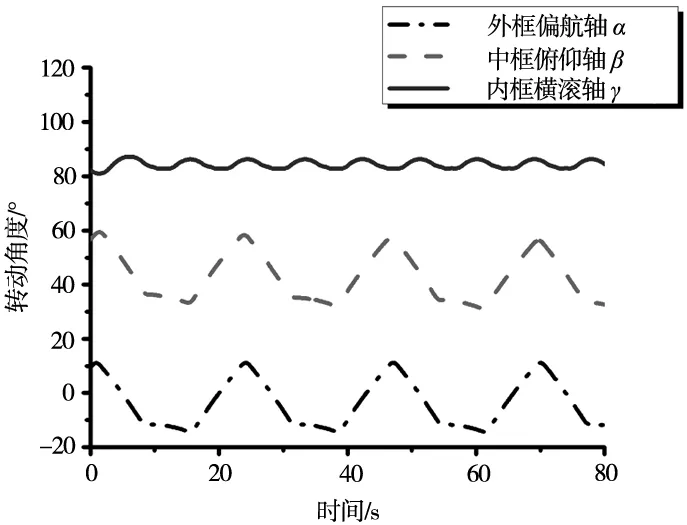
图3 三轴转台姿态变化轨迹
图4a为△θα各项误差源敏感度系数的比较结果。由图可知,三轴转台的垂直度误差和倾角回转误差是影响△θα的主要因素,其中εz(y2)、S(x3y2)、εy(x3)、εy(x4)、εz(z1)、S(y2x1)、S(y2z1)、εx(z1)以及S(z1y0)这9项误差源的敏感度系数之和为0.97,而其余误差源敏感度系数之和仅为0.03,对△θα的影响可忽略不计。此外,上述9项误差源中,中框z向倾角回转误差εz(y2)、内框x轴与中框y轴的垂直误差S(x3y2)、内框y向倾角回转误差εy(x3)和负载设备y向安装角度误差εy(x4)这4项误差源对△θα的影响最大,它们的敏感度系数均在0.13附近,在精度分析与设计时需优先考虑。
如图4b所示,对△θβ影响较大的误差源共有6项,分别为中框回转位置误差εy(y2)、外框y向倾角回转位置误差εy(z1)、中框z2轴与内框x3轴垂直度误差S(x3z2)、内框z向倾角回转误差εz(x3)、负载设备z向安装角度误差εz(x4)以及外框x向垂直度误差S(z1x0),它们的敏感度系数都在0.16附近,而其余误差源的敏感度系数之和仅为0.04,对△θβ的影响可忽略不计。
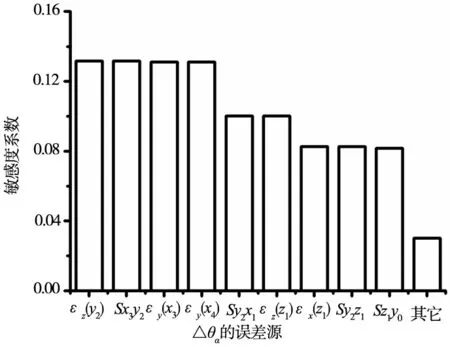
(a) △θα各误差源敏感度系数比较图
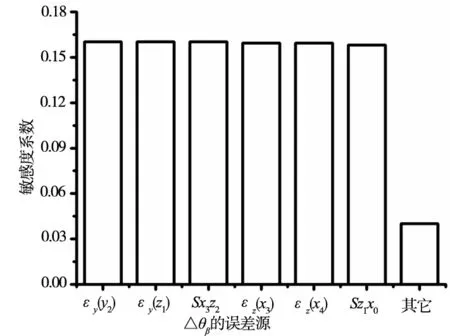
(b) △θβ各误差源敏感度系数比较图图4 三轴转台各误差源敏感度系数比较图
由上述结果可知基于本文所提方法,可确定转台中框z向倾角回转误差等4项误差源对三轴转台方位向指向误差影响最大;而影响俯仰向指向误差的主要是中框回转位置误差等6项误差源。在转台实际设计与装配中,可依据不同方向指向误差的要求,对相应误差源进行控制调整。
4 结论
本文提出了一种基于敏感度分析的三轴转台关键误差源辨识方法,首先建立了三轴转台指向误差模型,然后采用矩阵微分法推导出各误差源对指向误差的敏感度系数表达式,最后通过计算转台完整运动周期下各误差源的敏感度系数,识别出中框z向倾角回转误差等4项误差源对三轴转台方位向指向误差影响最大;而中框回转位置误差等6向误差源是影响俯仰向指向误差的主要因素。结果表明该方法可有效识别出影响转台指向误差的关键因素,实现误差溯源,为三轴转台的精度分析与设计提供理论依据和参考。
