水声定位系统中无线电通信链的设计∗
2019-05-07刘百峰
罗 坤 刘百峰
(1.91388部队96分队 湛江 524022)(2.91388部队94分队 湛江 524022)
1 引言
水下目标跟踪系统是用于对水下机动目标进行跟踪定位的测量设备,可用于精确跟踪和定位加装合作声学信标的多个水下目标的运动轨迹[1]。水下目标跟踪系统由海上浮标分系统、中继站、船载跟踪显控分系统等部分组成。浮标分系统负责水下目标信号参数的声学测量;显控分系统负责实时解算并显示目标的参数,监控全系统的工作状态。两分系统之间通过无线电通信链进行数据交换。无线电通信链是由基站和浮标中的通信部分构成。
被测目标发射的同步(或非同步)声脉冲被浮标水声系统检测并记录到达时刻与参考时刻的差,浮标位置由DGPS系统进行连续监测,上述信息通过无线通信链汇总到基站计算机。
计算机对浮标阵单元中的三个(或四个)浮标数据采用球面交汇技术(或双曲面交汇技术)解算出目标位置[2]。

图1 水下目标跟踪系统构成
无线数据通信链(包括浮标中的通信模块、基站综合处理机)是水下目标跟踪系统的关键技术之一。方案采用扩频通信和时分多址技术,具有保密性能好、抗干扰性强和扩展性强等优点。
2 无线电通信链和DGPS分系统组成及框图
无线通信链分系统包括船载跟踪显控系统中的综合处理机及海上浮标系统中的数据通信模块等。船载跟踪显控系统中的综合处理机是通信系统中的核心,简称基站。它担负全系统的指挥调度和传送DGPS差分修正信息的功能。
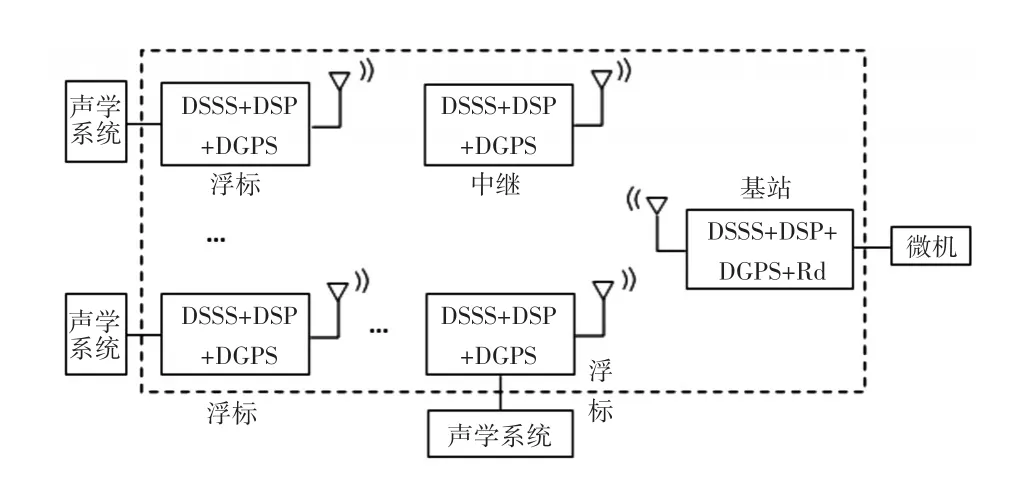
图2 无线通信链和DGPS分系统结构框图
各浮标内的通信模块平台(简称节点)主要完成水声换能器数据的收集、整理和发送任务。以通信平台、核心处理器及DGPS模块为核心,所以本系统将直接序列扩频通信平台(简称DSSS模块)、高速数字信号处理器(DSP)系统及DGPS接收机系统相结合,从而实现DSP+DSSS+DGPS结构。
3 无线电通信链的系统组成
无线电通信链的主要功能是数据传输,基站、浮标之间是通过扩频通信进行数据传输。通信DSP板的结构框图如图3所示。
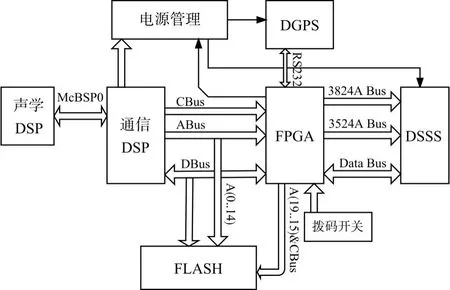
图3 通信DSP板结构框图
4 微波特性和海上通信试验研究
假设海面平稳的开阔地带,微波直线传输。因此在接收点收到的电波主要是由直达波和海面反射波合成的。所以影响电波在海上的传播主要考虑两方面的因素。第一,自由空间损耗;第二,多径传播的影响[3]。
4.1 微波在海上的传播特性
对于全向发射天线而言,自由空间损耗就是球面扩散所引起的损耗为[4]

其中:Lfs指传播损耗,λ为电波的波长,Gc、Gm分别是基站和移动台的天线的增益。假定Gc=Gm=1,用分贝表示则有:

式中:d为发射天线到接收天线的距离,单位是m;dkm为发射天线到接收天线的距离,单位是km;λ为无线电波的波长,单位是m;fMHz为无线电波的频率,单位是MHz。
反射波的影响相对于其它诸如散射波就要大得多。接收点收到的信号可以看成是直达波和反射波的矢量和,接收点的电场强度为[5]
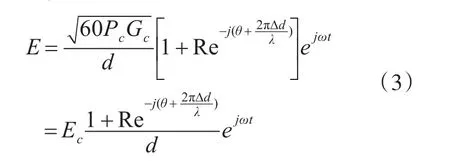
其中:Pc是基站的发射功率,Gc为基站天线的增益,d为基站到接收点的距离。该式中还含有两个未知数:R和Δd。
R为反射系数,它与接地角,电场的极化方向,介电常数,地表特性和发射频率有关。对于垂直极化的天线而言,R可表示为

式(5)中的 ε',σ 是与地表特性有关的常数,对于海水介质,两者的典型取值是ε'=81,σ=5.0。
Δd为反射路径和直达路径的差。


dc,dm分别是发射天线和接收天线到折射点的距离。hc,hm分别是发射天线和接收天线的高度,K是考虑了地球表面的弯曲和空气折射的影响后取常数4/3。当入射角较小时,可以认为R=1(完全反射),θ=π[7]。于是,由于直达波和反射波在接收点的干涉叠加,接收点的场强为

于是可得接收点收到的功率为[8]

对频率为2.41GHz的微波在海面上的传播特性作了计算机仿真,图4给出了在不同的发射/接收高度条件下,接收天线收到的功率(dBm)和发射/接收天线的距离曲线。图中H表示基站的天线高度,h表示浮标天线的高度。

图4 接收功率与距离的关系曲线

图5 直达波与反射波的相位差与距离的关系
仿真参数是基站的发射功率为0.5W,发射/接收天线的增益都为3dBm。电台的接收灵敏度为-92dBm。

式(10)中,Rp,dBm为接收功率(dBm)。GT,GR分别为发射/接收天线的增益(dBm)。根据所选用的天线和式(10)以及图4就可以预估出基站和浮标能够正常通信的距离[9]。例如假设发射和接收都是用增益为3dBm的全向天线,则由式(10)可以知道当Rp,dBm≥-98 dBm时电台能够正常工作,于是从图4可以查出在H=27m,h=4.5m时,基站和浮标能够正常通信的距离大约是15.6km。对比图4和图5可以看出,在直达波与反射波的相位差为1800时,接收点的信号深度衰落[10]。
4.2 海试数据处理
由于考虑浮标研制时的稳定性和可操作性,一般浮标的天线距海面为2.2m~2.8m为最优距离,因此在海上以通信拉距进行微波通信试验,测试在不同的天线高度条件下,基站与浮标之间的通信能力以及在不同的距离上通信的误码率。浮标的天线高度采用了在海上使用的2.2m。
实验内容:基站和浮标通信试验;H=27m,h=2.2m。
实验方式:基站轮询,浮标应答。
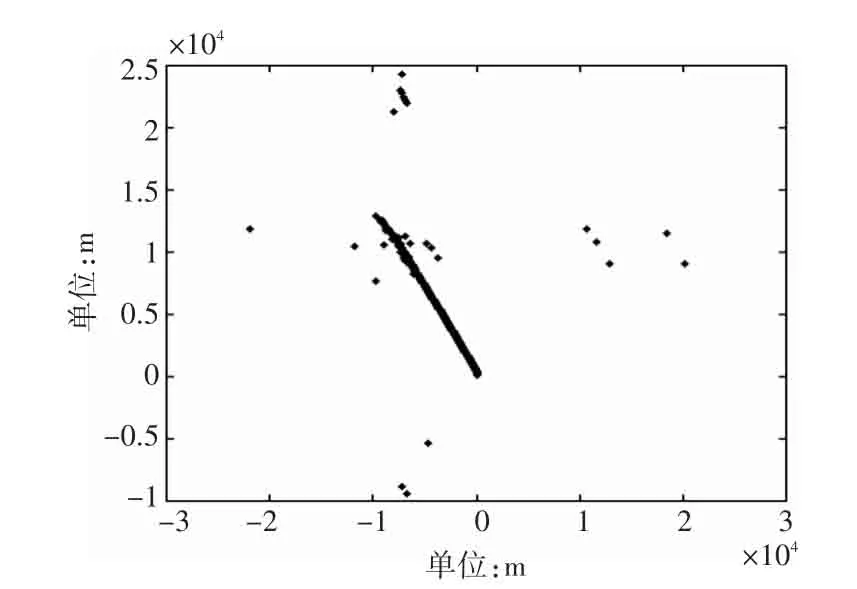
图6 基站和浮标相对运动轨迹
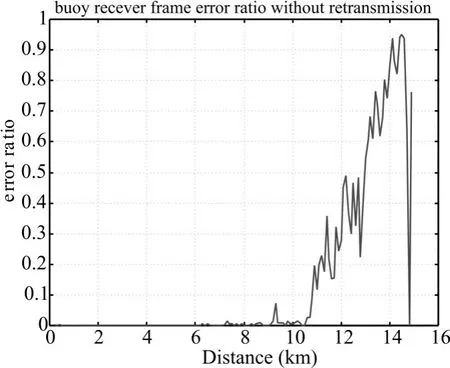
图7 误码率与距离的关系曲线
由图7可以看出来,当浮标的天线高度为2.2m时,基站和浮标之间误码率通信的距离是10km左右,略小于理论值11km。由于海上涌浪影响,使得浮标不是静止的,天线会有摇摆,导致了直达波和反射波的相位差的随机性,在高质量通信的区域降低了通信的质量,在强反射干涉区避免了持续误码[10]。
5 结语
通过对直达波和一个反射波的矢量合成作为接收点的接收波形为信道建立了传播仿真模型,并给出了仿真结果。通过在海上对适合的浮标高度进行拉距试验并和仿真结果进行了分析,结果表明试验和理论差距不大,为后续的浮标天线设计打下了坚实的基础。
