内表面污染物的低相干光干涉检测法
2019-04-26李振洋项华中
李振洋,项华中,葛 斌,王 成,郑 刚
(上海理工大学 上海介入医疗器械工程研究中心,上海 200093)
引 言
在用透明容器盛放物品或培养细胞时,由于物品本身不洁净,操作室与外界隔离不严或消毒不充分,都很容易造成容器内表面污染。即使一些封装的透明容器也可能在实验或存放物质的过程中混入粒子、油脂、水蒸气等污染物[1],而一旦污染,就可能带来一系列严重的后果。比如一些生产食品或高活性药品的工厂,操作器具都需要绝对干净,并实现全密闭生产过程,所以在生产中,有必要实时检测透明容器内污染物存在与否,并提前采取合理的补救措施。
目前有关污染物的检测方法主要有:利用不同物质的相态进行区别的气相色谱法[2]、液相色谱法[3]和液相色谱−质谱联法[4];利用基态原子吸收能量而被激发至高能态,而后退激发过程中以光辐射的形式发射出特征波长荧光的原子荧光法[5];将等离子体的高温电离特性与质谱计的快速扫描相结合而形成的电感耦合等离子体质谱法[6];通过散射并结合图形进行傅里叶变化的方法来测定光谱从而鉴定内部污染物的散射傅里叶变换技术[7-8];使用激光在材料表面形成高强度光斑,使样品激发发光,这些光随后通过光谱检测系统进行分析并区别出物质和污染物的激光诱导光谱法[9]。虽然这些方法有的可以定性、定量地测量出目标污染物的类别及含量,但也有各自的局限性。比如设备昂贵、检测费用高、便携性差、测量范围有限制或检测过程复杂,需专门技术人员操作和不能实现在线快速检测等。
本文根据光在介质分界面处的反射特性,基于改进的迈克尔逊干涉仪光路和低相干光干涉的原理,来获取容器内表面反射光信号,并根据干涉信号的光强度差别判别透明容器内部是否被污染。本文方法操作简便、快捷,能满足透明容器或管道内污染物的实时在线检测的要求。
1 实验装置及其测量原理
图1是透明容器内表面污染物检测系统,它是一个改进的并采用会聚光路的迈克尔逊干涉系统。半导体激光器(Laser Diode, LD)发出中心波长为810 nm的近红外低相干光,然后此光束依次经聚焦镜(Lens 1)、针孔光阑(Pinhole Aperture)和准直镜(Collimating Lens)到达半透半反镜(Beam Splitter, BS),在半透半反镜上分成两束:一束穿过半透半反镜和补偿镜(Compensator)经聚焦镜(Lens 2)会聚到透明容器(本文所用的比色皿)前壁后表面,被反射之后沿原路返回,构成测量臂,形成测量信号光;另一束聚焦到组合镜(Mirror, M)上(先经角镜(Corner Prism, CP)折反,再经聚焦镜(Lens 3,L3)聚焦到反射镜(Mirror 1, M1)),被反射后再沿原路返回,构成参考臂,形成参考光。这两束光通过观察物镜(Observation Tube Lens)会聚,经光阑到达光电探测器(Photo-detector)。在探测器上,当这两束光满足干涉条件时就会出现干涉信号[10-12]。M1及L3(两者之间刚性联结)安装在能够精确移动的平移台上,通过调节M1,可以改变参考臂的光程。光电探测器将光信号转变成电信号,并在示波器(Oscilloscope)上显示和记录。连续移动M1,当来自参考臂与测量臂的两束光的光程相等时,可以观察到振荡的干涉交变信号(可理解为干涉条纹的移动引起的信号变化),再经后续处理和比较即可判别透明容器内表面有无污染物或是何种污染物。
设两个频率相同,振动方向也相同的单色光波在P点相遇。故两光波各自在P点产生的光振动分别为:

式中:a1和a2分别为两光波在P点的振幅;r1和r2分别为P到两光源的距离;k为波数;为角频率;t为时间。根据叠加原理,在P点的合振动为

设 α1=kr1,α2=kr2,则式 (3)可化为


图1 透明容器内表面污染物检测系统Fig. 1 Detection system for inner surface contaminants of transparent vessels

若这两个单色光波在P点的振幅相等,即a1=a2=a,则P点的光强可表示为[13]

式中:I0为单个光波的强度,并且I0=a2;δ为两光 波 在 P 点 的 位 相 差 , 并 且 δ=α2−α1。 当δ=2π的整数倍时,I=4I0,P点有最大光强值。若这两束单色光没有恒定的位相差,即不满足干涉条件,则P点的平均光强为

即P点的平均光强度恒等于两叠加光波的强度之和。由此可见,若采用干涉信号,能得到2倍于非干涉信号的光强度,据此能提高测量系统的检测灵敏度。
本文采用低相干宽带LD光源,其中心波长为λ0=810 nm,其光谱振幅的半高全宽(full width half maximum, FWHM)为Δλ=25 nm,根据相干长度lc的计算公式[14]

可知lc=23.2 μm,即相干长度很短。因此,当实验中光电探测器出现干涉信号时,可以认为测量臂与参考臂的光程相等,由此能实现来自透明容器内壁的反射光与参考光的有效干涉。
实验过程如下:调节平移台使反射镜M1缓慢移动,当反射镜M1反射的光与空比色皿前壁内表面反射光的光程相等时,探测器会检测到干涉信号,在示波器上显示的是震荡的电压信号,同步存储此干涉信号;随后对内壁被污染的比色皿做同样处理,对得到的各个干涉信号作数字信号处理后再进行前后两组数据的比较,根据其差异即可鉴别透明容器内表面是否存在污染物。
2 干涉信号处理及结果分析
2.1 实验结果处理
在实验时,用水和食用油模拟透明容器内的污染物,测得的干涉信号如图2、图3、图4所示。
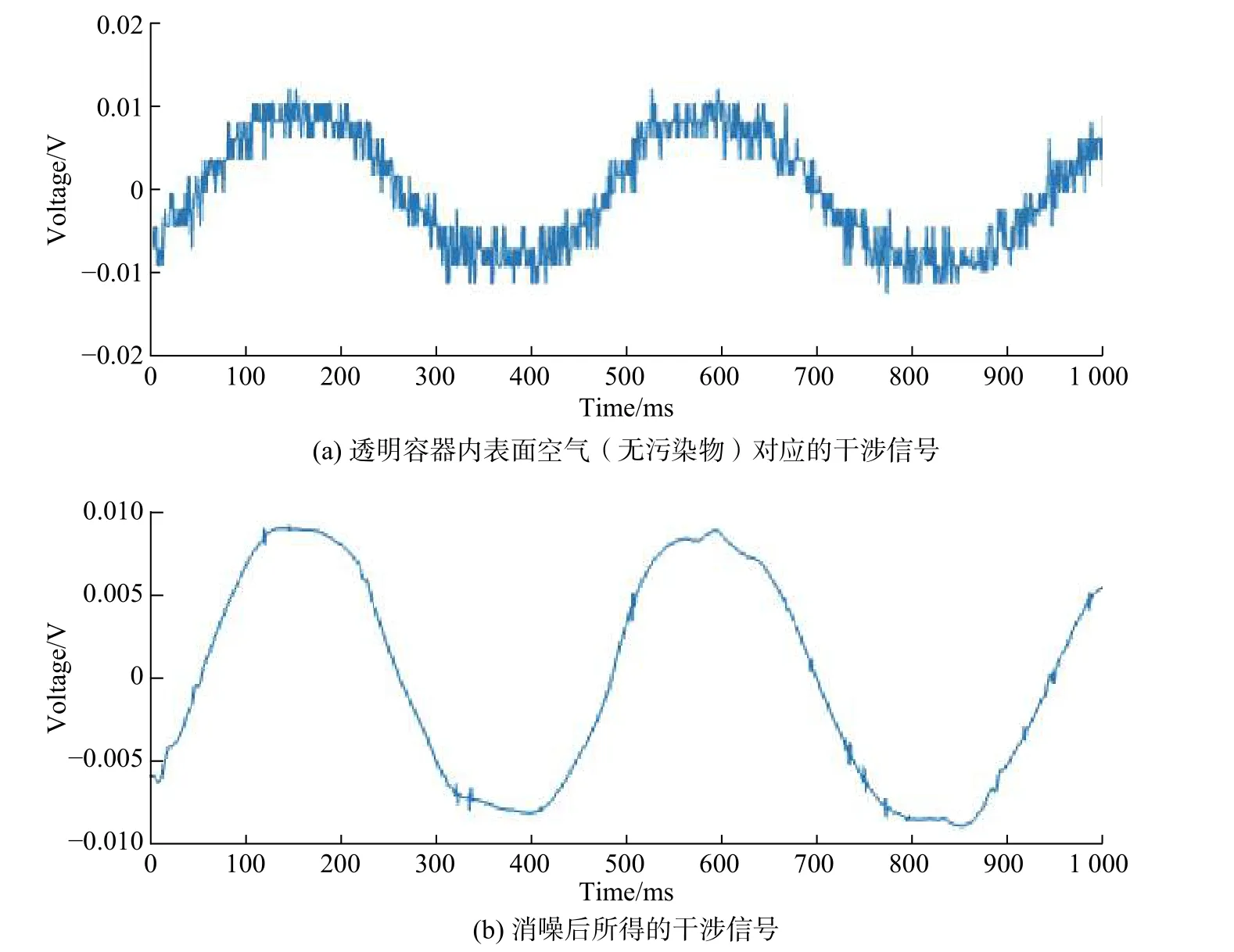
图2 透明容器内表面空气(无污染物)对应的干涉信号Fig. 2 The interference signal corresponding to inner surface air (pollution-free) in the transparent vessel
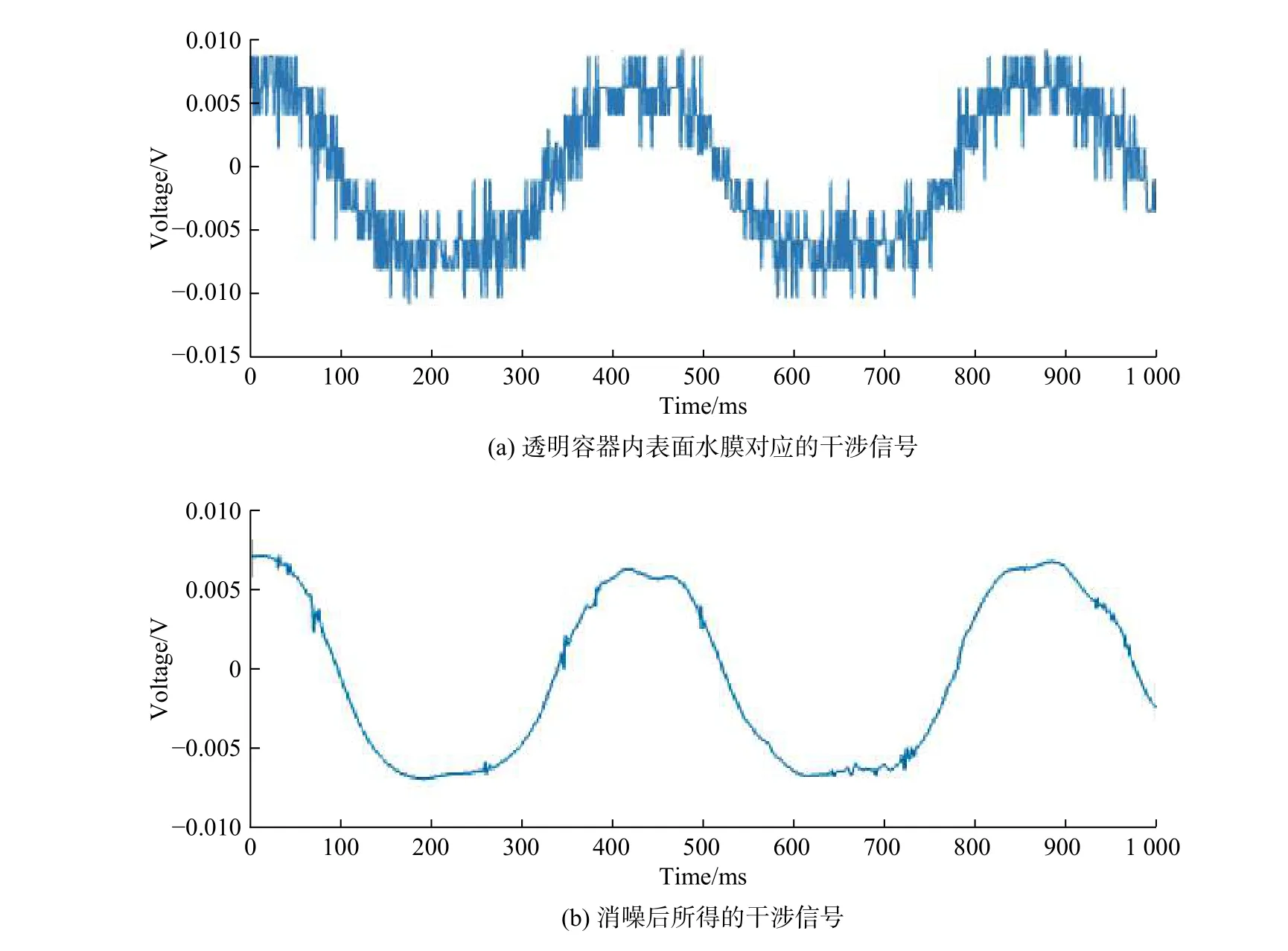
图3 透明容器内表面水膜对应的干涉信号Fig. 3 The interference signal corresponding to inner surface water film in the transparent vessel
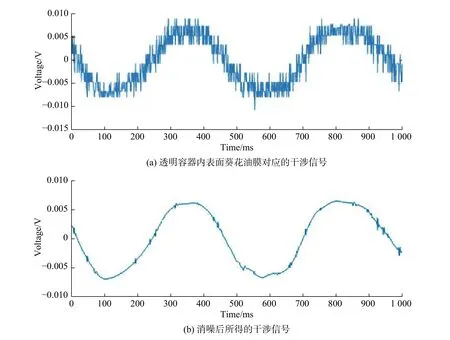
图4 透明容器内表面葵花油膜对应的干涉信号Fig. 4 The interference signal corresponding to inner surface sunflower oil film in the transparent vessel
图2(a)、图3(a)、图4(a)分别对应透明容器内表面空气(无污染)、透明容器内表面水膜和透明容器内表面葵花油膜的原始干涉信号。
原始的干涉信号易受热噪声、工频等干扰,因此在整理信号之前先进行消噪预处理。小波阈值消噪算法[15-17]是根据信号和阈值选择标准来确定一个消噪处理过程并采用自适应阈值。图2(b)、图3(b)、图4(b)分别是经过小波消噪后得到的干涉信号。
根据傅里叶变换原理,时域中任何非周期信号都可由无限多个振幅不同的简谐分波叠加获得,任何两个“相邻”分波的频率相差无穷小。某一时刻,全部简谐波分量的叠加会产生时域中信号强度的变化,在示波器上以纵坐标电压的大小来表示。
由傅里叶积分定理给出的函数变换为[13]

称为f(x)的傅里叶变换,而

称为F(k)的傅里叶逆变换。
将上述消噪后的干涉信号在MATLAB中进行傅里叶变换,所得到的傅里叶变换曲线如图5、图6、图7所示。
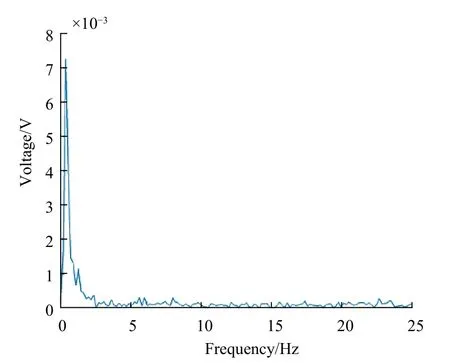
图5 透明容器内表面空气对应的干涉信号傅里叶变换曲线Fig. 5 The Fourier transform curve of interference signal corresponding to inner surface air in the transparent vessel
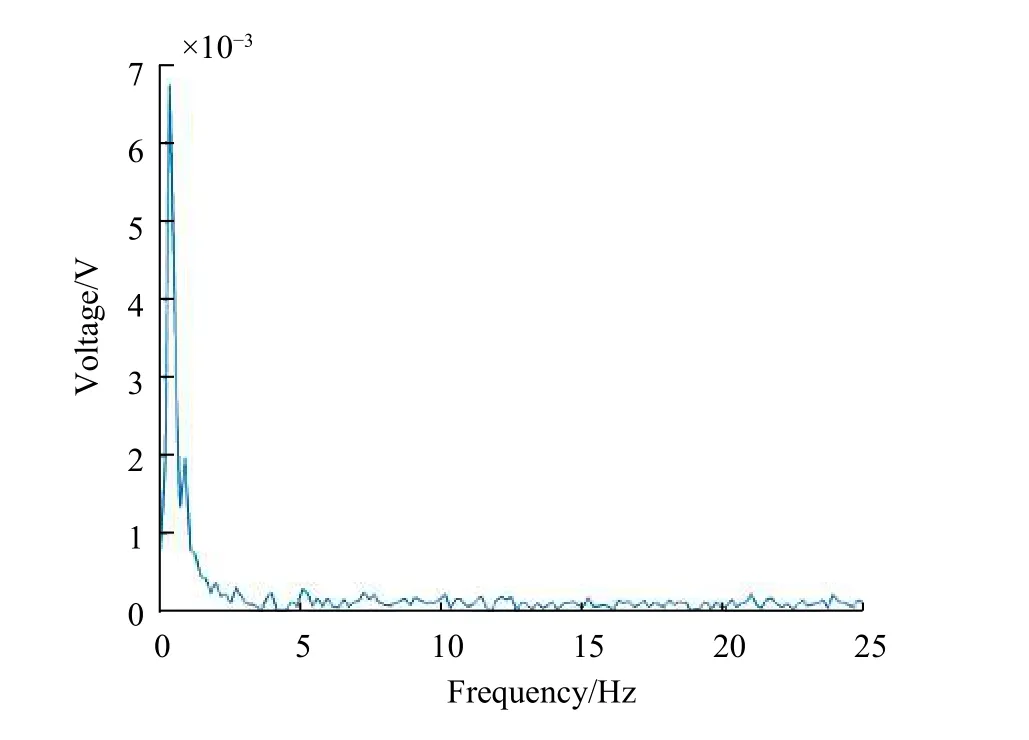
图6 透明容器内表面水膜对应的干涉信号傅里叶变换曲线Fig. 6 The Fourier transform curve of interference signal corresponding to inner surface water film in the transparent vessel
图5、图6、图7分别对应透明容器内表面空气(无污染)、透明容器内表面水膜和透明容器内表面葵花油膜的干涉信号傅里叶变换曲线。将此傅里叶变换曲线进行面积积分(积分区间取峰值附近的一段有效频率范围,而非图中整个横坐标),即
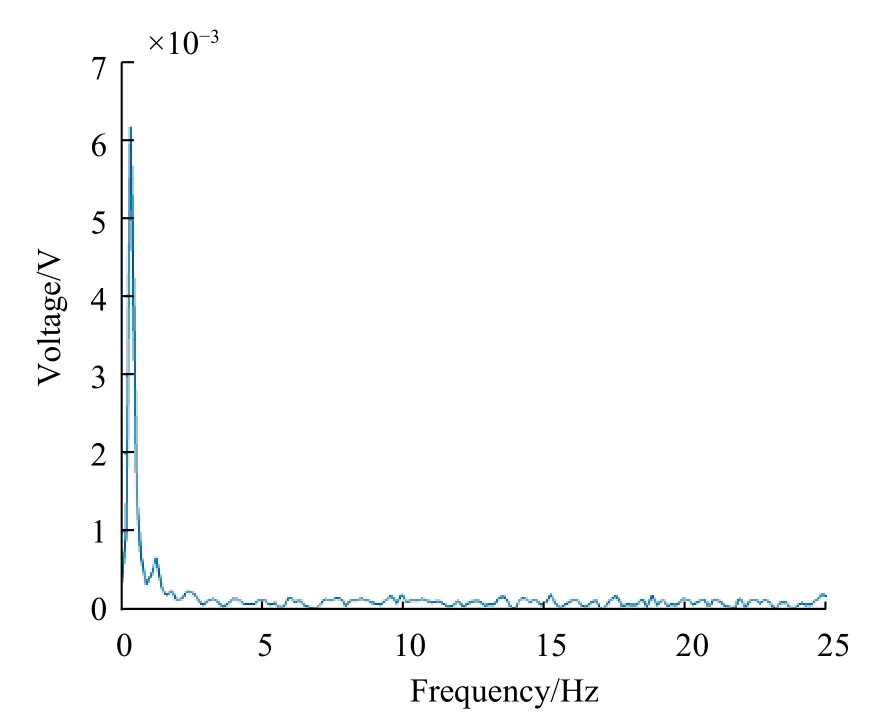
图7 透明容器内表面葵花油膜对应的干涉信号傅里叶变换曲线Fig. 7 The Fourier transform curve of interference signal corresponding to inner surface sunflower oil film in the transparent vessel
为方便并不失一般性,本文将式(10)的结果作为干涉信号的光强值,即内表面的反射光强值(实际上是与此值成正比)。
2.2 结果分析
在同一环境下(温度、湿度、气压基本不变的情况),分别对透明容器内表面为空气、水膜、葵花油膜、菜籽油膜、橄榄油膜进行干涉信号光强度的重复测量,并取测量的平均值,实验结果如表1所示。

表1 透明容器内表面污染的干涉光强度测量表Tab. 1 Interference light intensity measurement for internal surface contamination of transparent containers
由表1实验结果可知,内表面有、无污染物或不同污染物对应的干涉信号光强均不同,据此可对有、无污染物及其种类加以鉴别及区分。本实验干涉信号与环境中其他电磁信号相比,较弱且易受干扰,所以实验中应注意此问题。
3 结 论
本文提出了一种测量透明容器内表面是否存在污染物的新方法。利用改进的迈克尔逊干涉光路和低相干光干涉的原理,来获取透明容器内表面反射光信号,并根据干涉信号的光强度差别区别不同的污染物。由于干涉信号的光强度是单个反射光强度的四倍,因此更易被光学探测器探测和区分,提高了系统的检测灵敏度。实验中采用动态交流干涉信号(非直流量),且采用成熟的信号处理方法,提高了测量的准确性。实验表明,该检测方法实用快捷、装置简单,有望应用于生物医学及食品生产等领域透明管道或器皿中污染物的实时在线检测中。
