一种仿人直立行走机器人的结构设计研究
2019-04-25倪笑宇马晨园王占英耿明超胡一龙
倪笑宇,马晨园,王占英,耿明超,胡一龙
(河北建筑工程学院,张家口 075000)
0 引 言
仿人机器人的研制开始于20世纪60年代,虽然只有五十多年的历史,但研究工作发展迅速,特别是近十年,随着各种新技术的快速发展,世界各国在这一领域的研究取得了长足进步[1-2]。我国在仿人机器人的研究方面起步较晚,整体技术很大一部分依靠国外引进,但近些年也取得了很多研究成果,从四自由度到六自由度,从步态模拟到交叉足步,机器人的仿生已然成熟[3-6]。而本设计在满足机器人基本行动要求的前提下,保持自由度数目不变,减少电机个数,进一步改进结构形式,采用直流电动机驱动,提高自由度利用率与整体强度,提升机器人的实用性。
1 双足行走步态规划
该设计仿人机器人采用单、双脚交替支撑的方式步行,整个动作的顺序是机器人左胯—左脚—偏心—右胯—右脚循环执行,如图1所示。要实现稳定的步行,必须规划出合理的步态,并能够很好地调节重心。目前,比较成熟的步态规划方法[7-9],主要有基于仿生运动学的步态规划方法、基于模型的步态规划方法等,本文不再赘述。
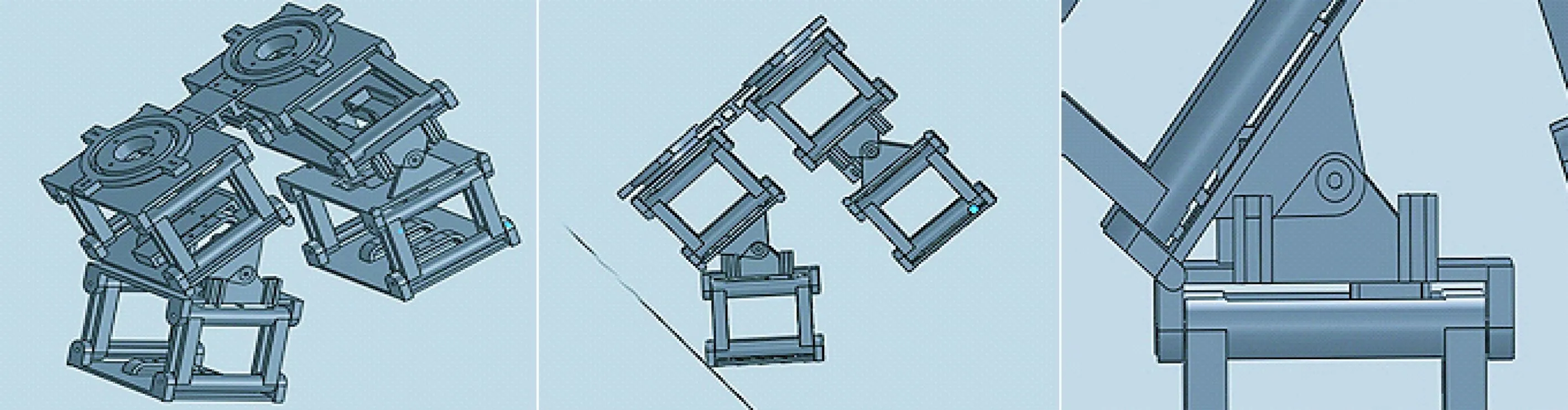
图1 双足偏心行走示意图
2 机械结构设计
该设计在满足机器人基本步行要求的前提下,改变结构、减少电机、提升负载。该种机器人结构主要包括并联平行四杆型腿部肢干机构、行星轮型偏心机构和不完全齿式转体机构。
2.1 腿部肢干机构设计
目前,常见的六自由度仿人机器人其主要驱动件为舵机,同时结合肢干构件组成悬臂梁型旋转副,从脚踝到膝盖共需要两个电机来实现一个小腿(膝盖到腰胯则对应一个大腿)的前后运动[10-11]。这种组合普遍应用于小规模表演机器人,灵活性强,可塑性强,但在实用开发方向上有局限性:舵机为高度集成化的驱动件,集电机、减速箱、硬件电路板于一体,精度较高,但体积较小,承受负载能力较差,在机构设计上无法同时满足高负载能力与高精度双重要求,一旦负载加重,极有可能造成舵机内部零件的损毁。而要开发具有一定实用价值的机器人,负载能力是首先要考虑的,故以舵机为主要驱动件的运动副不是理想运动副。
因此,设计一种以直流电动机为驱动件的旋转副,配合限位开关作为复位坐标定位,发挥舵机部分反馈功能,配合平行四杆机构作为肢干构件且搭以行星轮一级减速作为中间传动,在满足基本步行的要求下,弥补了舵机驱动旋转副的不足。
直流电动机中的涡轮蜗杆减速电机具有断电自锁特性,故可以做到无功耗的状态保持,在项目长期作业中,需要这一特性来开展其他工作。同时,避免了电机直接与运动构件相连,故不存在舵机悬臂连接所带来的同轴度偏差,而一级减速输出轴两端固定,可以均衡负载,使得承载能力大大提高。
该机器人肢干结构为两个并联的平行四杆机构,其中上下两杆为平板状。这样设计的目的是为了均衡力矩,将局部力矩转化为均布载荷,提高肢干负载能力,但运动特性与单个平行四杆机构是一致的。平行四杆符合人类行走时身体在迈收步中脚掌保持平行的关系,与舵机驱动相比,完成同样的动作却少用一个电机,一方面降低了制造成本和功耗,另一方面用机械结构代替脚踝电机与膝盖电机的配合关系,大大提高了动作吻合度,消除了负载对电机的径向力,减轻了电机的负担,大大增强了机器人的负载能力。综上所述,平行四杆在高强度、高精度、动作灵活性要求较低的环境下拥有其他机构不可比拟的优势。
平行四杆具有承载能力强、上下杆始终保持平行的优良特性,但若想精确控制其上下杆错位位移,的确不同于解决常规错位问题那样简单。通常,齿轮齿条配合可以实现两者之间的相对运动,但只限于一个方向,而对于平行四杆中上下杆的相对运动,其在X及Y方向均有位移,这不是简单的齿轮齿条所能解决的了。有人提出用齿轮齿条结合滑块实现高低副搭配来解决,高副负责X方向,低副负责Y方向,如此设计的确解决了问题,但并不是最佳。原因是平行四杆机构虽然在运动路线上处于双向,但其路线特征体现的是一个自由度的运动曲线,高低副搭配实则拥有两个自由度,自由度越多,灵活性越强,但其结构复杂,加强筋少,用两个自由度的运动副代替一个自由度的运动副,只能保证正常工作,但在刚度等其他力学性能上却不能满足需要。
其实,一个自由度的运动路径可能千变万化,但其运动方式却是单调的,把解决这个问题的出发点放在一个自由度的基础上来思考:平行四杆上下杆运动是由两侧摇杆驱动的,而摇杆与下杆仅为一个旋转副,故上下杆相对运动路径为一段圆弧,由此,便设计了行星轮组合,如图2所示。只要令太阳轮所在分度圆圆心与双摇杆旋转中心的中点重合即可,行星轮与上杆为一个构件,如此便实现了上下杆的行星运动,主动轮围绕从动轮做行星运动,其运动轨迹与四杆中的曲柄运动轨迹形成一对同心圆,可以实现实时控制的平行运动,且可以随时锁定。在受力方面,仅存在一个高副,没有悬臂力矩,故行星轮组合实现平行四杆上下运动最佳。
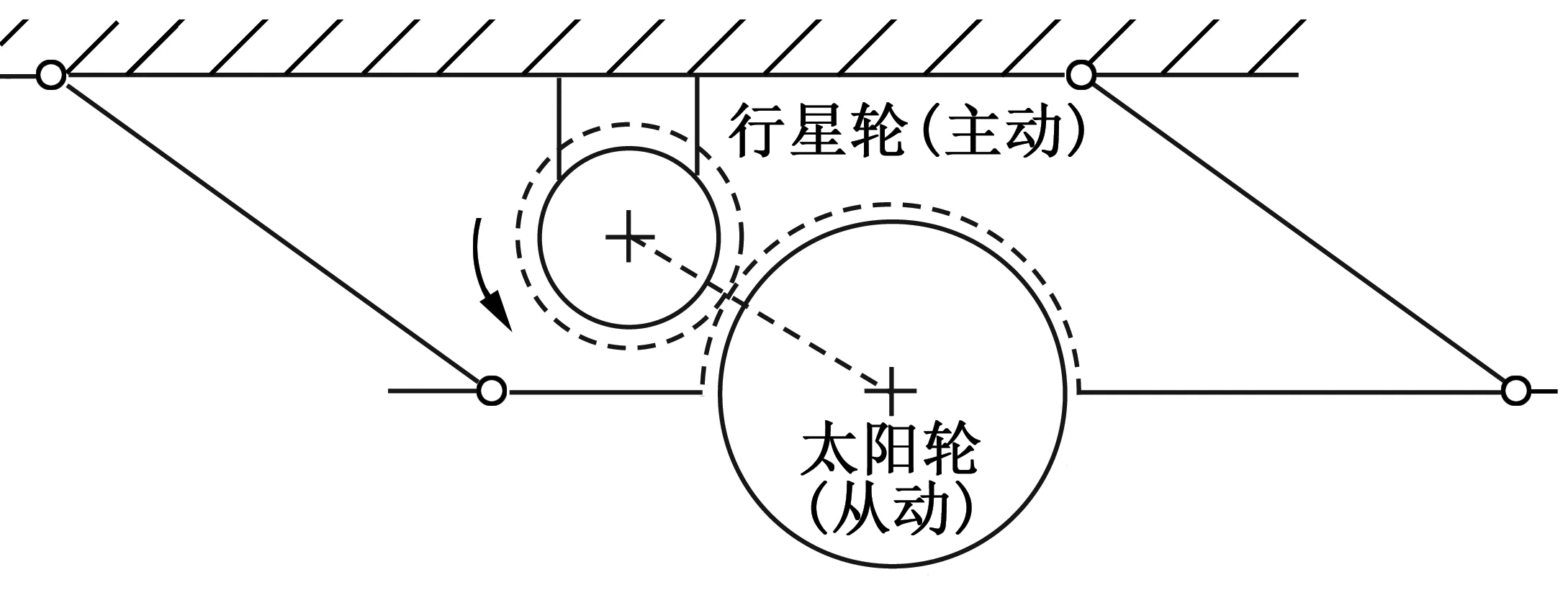
图2 平行四杆型肢干结构
2.2 偏心机构设计
偏心机构是所有步行机器人最为重要的转移重心机构,在设计上要充分考虑其负载能力、尺寸大小、安装位置,且三个指标互相影响。首先要选用减速比大的涡轮蜗杆电机;其次要尽量缩小机构尺寸。普通舵机机器人一般继续沿用其自身的肢干旋转副,结构简单,但只限于质量较小的表演型机器人,一旦负载加重,超出减速箱负载能力,极有可能造成崩齿;普通减速为正齿轮啮合,构件通过其连接之后会增大偏心力矩,给电机带来额外的负载,这显然不符合压缩偏心机构对负载的要求。
针对以上两种情况,我们设计了一种以行星轮减速,中间加以防抱死齿轮的偏心机构,如图3所示。不完全内齿轮作为太阳轮,电机驱动轮作为行星轮,大大减小了负载力矩。普通正齿轮啮合所承受的负载力矩为主动轮分度圆半径加从动轮分度圆直径,径向矢量大,负载力矩大;内齿轮与主动轮相结合则径向矢量为内齿轮分度圆半径减去主动轮分度半径的绝对值,显然差要小于和,故在一定程度上压缩了空间,缩小了负载对偏心电机的力矩。

图3 行星轮型偏心结构
加入防抱死齿轮,负载超过额定载荷时,机构产生打滑,保护内部零件。这里真正起到防抱死作用的是支撑防抱死齿轮的支撑杆,由于材料与机架不同,故其具有一定弹性。当负载加重时,电机输出扭矩不足以带动整个机构,其上齿轮开始调节与主动轮及内齿轮的啮合关系,最终被主动轮“挤出”,产生打滑现象,避免了电机内部的抱死,防止烧坏电机。
2.3 转体机构设计
机器人转体结构分为交叉步转体和直接转体。对于小型机器人,可以不增设转体机构自由度,直接编写一套交叉步转体程序即可实现。然而对于大型机器人或对转体精度有较高要求的机器人,交叉步转体精度差的问题便会放大,故必须增设一个新的转体机构来实现精确转体。常规方法为双电机控制,且各自协调,分时运动,可行性高,唯一缺点就是多使用了一个电机。我们分析一下转体过程,以向左转为例:左偏心—右肢内旋—偏心归位—右偏心—左体后旋(右肢外旋),走完这一流程,机器人整体以左脚为圆心,整体逆时针旋体,调整前进方向为左前,过程虽然稍微复杂,但对于右肢内旋和左体后旋来说,这两个过程分时且二者在空间上没有任何干涉,运动特征为单调,因此可以用一个电机来实现转体运动,具体结构如图4所示。虚线表示分度圆,实线表示齿根圆,其中主动轮为不完全齿,目的是在与其中一个齿轮啮合的同时,与另外一个齿轮脱离;每个从动轮均加以扭簧复位,其上方分布有限位开关,二者相辅相成,当所在从动轮脱离主动轮后,可以使其保持一定程度的静止状态。如此设计最大的特点是节省一个电机,方便调试,节约成本,并且将其载荷置中,一定程度地减小了带给偏心机构的压力。

图4 转体机构图解
3 结 语
试制仿人步行机器人原理样机,如图5、图6所示。该原理样机外形结构采用3D打印完成,质量轻,成本低。运行结果表明,该机器人步态平稳、结构设计合理、负载能力强、精度较高。
本文针对仿人步行机器人机械结构设计进行研究,开发出一种新型结构的步行机器人,主要包括行星轮式平行四杆肢干机构、行星轮式偏心结构和不完全齿式的转体机构。机器人采用涡轮蜗杆直流电动机进行驱动,其驱动能力和承受负载能力远远高于常见的舵机,在大型机器人以及对负载能力要求较高的机器人中具有优势。
图5 仿人步行机器人原理样机

图6 肢干结构实物图