UKF估计器对IPMSM 无传感器控制的比较研究
2019-04-25SHEIANOVAleksandr康尔良
SHEIANOV Aleksandr, 康尔良
(哈尔滨理工大学,哈尔滨150080)
0 引 言
永磁同步电动机(以下简称PMSM)无传感器测量技术由于消除了位置传感器易碎、噪声大、成本高等缺点,受到了国内外学者的广泛关注[1-2]。该技术通过测量定子侧的电压和电流信息,并结合相关算法,估算出转子的位置信息。转子位置和转速的准确估算是影响这类系统性能的关键。
卡尔曼滤波器系列中有许多类型的观测器。卡尔曼滤波器最初是线性类型的估计器,也称为线性二次估计器(以下简称LQE)。卡尔曼滤波器是以Kalman R命名的,也就是这个理论的开发者[3]。卡尔曼滤波器在所有线性估计器和观测器中具有最好的性能,在飞行器,特别是飞行器和航天器的制导、导航和控制等领域有着广泛的应用。至于非线性问题,卡尔曼滤波器家族也提供了许多不同的方法[4]。迄今为止,研究最多的是扩展卡尔曼滤波器,它首先根据先前的估计来计算预测状态,然后以相同的方式,输出函数h根据预测状态来计算预测测量值。然而,这种滤波器的f和h不能直接应用于协方差,因此,需在每个时间步长中[5]计算偏导矩阵(雅可比矩阵)。虽然EKF(Extended Kalman Fitler)应用于电机控制是相对简单的,但它有许多主要缺点:线性化过程中雅可比矩阵的推导比较复杂;因为忽略了高阶项,EKF仅具有一阶精度;线性化引起的滤波器不稳定性。
为了消除这些问题,使非线性卡尔曼滤波器族比其他非线性算法更精确、更优越,Julier和Uhlmann[6],提出了一种改进非线性卡尔曼滤波器性能的新方法。无迹卡尔曼滤波器(以下简称UKF不是在每个时间步长对非线性系统进行线性化(求解雅可比矩阵),而是使用样本点的最小集合,这些样本点被馈送到非线性状态方程,以获得预测步长中非线性系统的均值和协方差,然后根据新的测量结果来校正预测估计值。UKF已成功地应用于导航、雷达跟踪、信号处理、神经网络和机器人等实际应用[7-8]。AKIN[9]报道了UKF在电机控制中的首次实现。Borsjie P等人[10]报道了UKF在PMSMd-q参考系下的无传感器矢量控制应用;Titaouine A,Taibi D[11]结合逆变器的非线性控制;Cheol Moon, Kee Hyun Nam[12]在α-β参考系中实现了该算法。然而,到目前为止,关于UKF在内置式永磁同步电机(以下简称IPMSM)应用中的论文寥寥无几。
目前,对滑模观测器已经进行了大量的研究,这些研究都表明在实时应用中实现这种方案的潜力很大[13]。滑模观测器在商业产品中已被广泛使用,因为其简单,显示出相对良好的性能,并且可以在廉价的定点DSP上实现,从而降低了产品的成本和尺寸。然而,在低速范围内它表现出较差的性能,这在一些应用中是非常关键的因素,因此有学者提出通过起动技术[14-15]以及高频注入方法[16-20]来增强滑模观测器,规避起动的问题。这在低速范围内这增加了无传感器方案的计算量和复杂性。
本文是对上述文献的扩展。此外,本文还对UKF和滑模观测器进行了比较,在MATLAB/Simulink中进行了仿真,表明这两种算法在性能上有明显的差异。
1 PMSM数学模型
卡尔曼滤波器需要该系统的数学模型,以便估计系统的状态。受控系统数学模型的制定是估计器设计阶段的一项重要任务。正确的模型不仅可以简化估计问题的求解,而且可以简化整个算法的计算量。
为了避免起动时的收敛问题和简化电机方程,选择d-q参考系来评估卡尔曼滤波器[2]。电机非线性状态方程可以表示:

(1)
y(t)=Hx(t) (2)
式中:输入向量u=[uduq]T;输出向量y=[idid]T。UKF由4个状态变量组成:静止参考帧电流、估计速度和估计角度。由于机械变量有快速变化的趋势,并且很难正确测量,所以状态变量仅由电变量组成。状态变量向量x=[idiqωeθe]T。通过取式(1)和式(2)中的偏导,我们可以写出系统状态矩阵:


2 UKF
对于使用UKF的PMSM无传感器控制,电机非线性状态方程式(1)和式(2)应以离散形式:
xk+1=Fd(xk)xk+Gduk+Bwwk(3)
yk=Hdxk+vk(4)
式(3)和式(4)所表示的状态模型还包括对误差的统计描述,其中wk~N(0,Qk)和vk~N(0,Rk) 分别是协方差矩阵Qk和Rk的零均值高斯过程噪声和测量噪声向量。
2.1 无迹变换
无迹变换的设计是基于这样的事实,即近似概率分布比近似非线性函数(后面是EKF所基于的原理)更容易。关键是在高斯输入的情况下,近似精确到第三阶。对于非高斯输入,近似精确到至少一个二阶。因此,UKF期望比仅具有一阶精度的EKF提供更好的性能和精度。

西格玛点集:
(5)
式中:L是维数。
加权:


式中:λ=α2(L+κ)-L,λ表示缩放参数;上标m,c表示均值和协方差计算的加权点;α决定了西格玛点在x附近的扩展,10-4<α≤1;常数κ是另一个标度参数,通常设置为κ=3-L;β是x分布的先验知识(对于高斯分布β= 2是最优的)。
每个点通过非线性状态转移和测量函数传播,以产生一组变换后的点:
Yi=g(χi)i= 1,…,2L(6)
用加权平均值和协方差近似y的均值和协方差:
(7)
2.2 UKF算法
UKF是无迹变换递归卡尔曼滤波方程的直接应用。UKF流程如图1所示。

图1 UKF框图
UKF算法包括以下步骤:
(1) 计算西格玛点的集合。
(2) 通过非线性PMSM模型传播西格玛点:
χk|k-1=f(χk|k-1;uk|k-1)
(3) 计算预测平均值:
(4) 计算预测协方差:
(5) 通过观测模型对每个预测点进行变换:
Yk|k-1=h[χk|k-1]
(6) 计算预测观测的加权平均值:
(7) 计算创新协方差矩阵:
(8) 计算互协方差矩阵:
(9) 校正步骤使用正规卡尔曼滤波方程进行更新。
卡尔曼增益:
Kk=Pxk ykPykyk-1
修正估计状态:
校正协方差



图2 基于UKF估计的无传感器闭环系统
3 滑模观测器
本文对无传感器滑模观测器作简要的说明,然后在MATLAB/Simulink中进行仿真。这种控制算法的完全推导、改进和结果可以参照文献[16]。
式中:iα和iβ表示的是在静止参考系中被测定子电流;uα和uβ表示的是在静止参考系中PMSM所施加的电压。定义x= [x1,x2]T= [iα,iβ]T,eα=ωψfsinθ,eβ=-ωψfcosθ,在α-β中的PMSM的状态空间模型:
(9)
采用滑模观测器的目的是在不知道电机实际转子位置和速度的情况下调节电机速度,即实现PMSM的无传感器控制。同时,为了避免抖动,将传统的滑模观测器中的符号切换函数由以下饱和函数代替:
(10)
通过在滑模观测器中应用饱和函数,定义的滑动变量可以在有限时间内到达边界层,并在边界层中停留。估计模型如下:
(11)
从式(9)和式(11),可以导出以下关系:
(12)

(14)

将上述方程经过拉普拉斯变换之后,可以得到以下传递函数:
(16)
由变量σ1和σ2定义的滑动面可视为eα和eβ的滤波信号。因此,利用这一原理,我们可以提取转子的位置信息,然后使用锁相环方案,计算出转子速度。下面将比较两种无传感器控制方法。
4 仿真结果
通过两种算法的仿真来验证所提出算法的性能,从中可以得到一些明显的差异。仿真中使用的IPMSM的参数如表1所示。
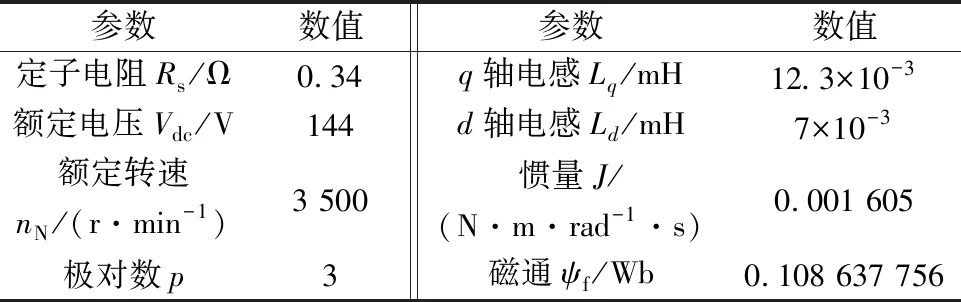
表1 IPMSM参数
图3是用滑模观测器模拟的。从系统的速度响应可以看出,在低速区域,特别是700 r/min时,系统存在一些振荡。这是这种类型的观察器的一种常见行为,表明它不能应用于一些低速应用。而700 r/min后,可以高精度跟踪速度和角度,并且具有较小的误差,在额定速度下可以忽略。整个系统显示出较好的性能,但在实际应用中还需要一些起动算法,如:I-f起动或高频注入。运行到600 r/min后,切换到滑模观测器跟踪算法。
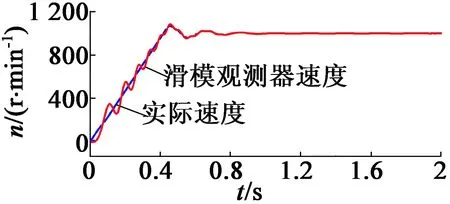
(a) 实际和滑模观测器速度响应

(b) 实际和滑模观测器计算的角度
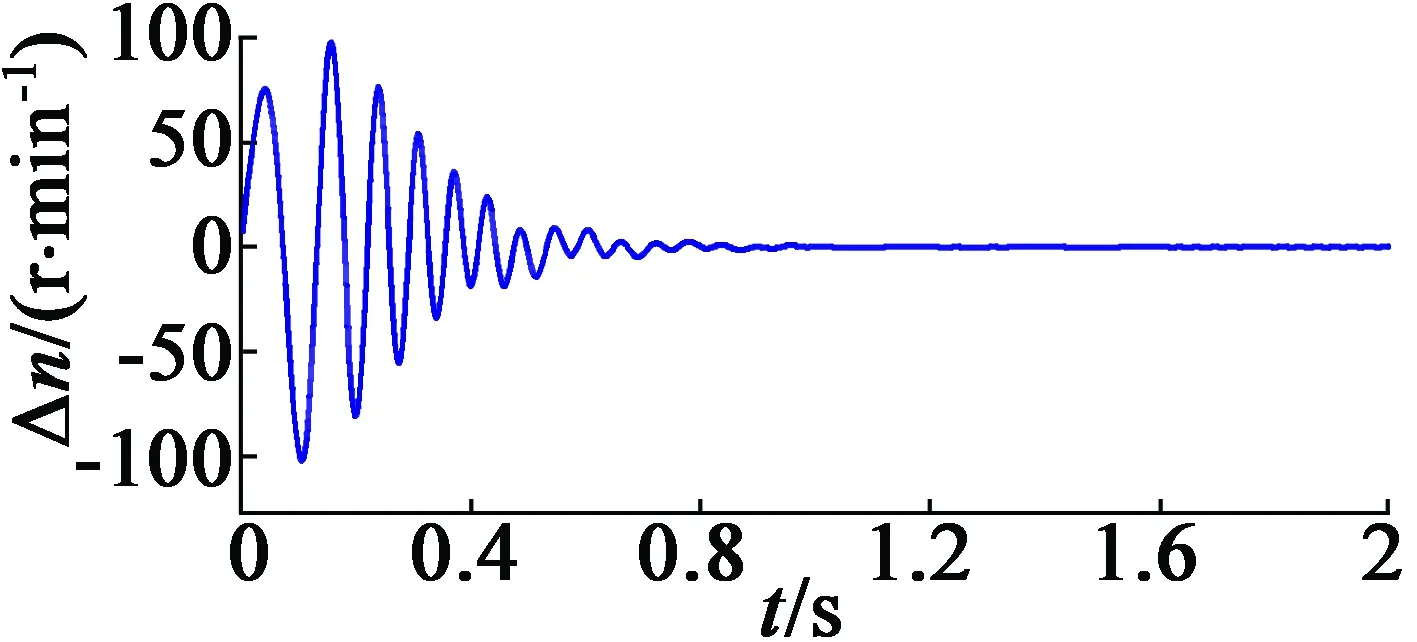
(c) 实际速度与滑模观测器之间的误差

(d) 实际 θ角度和滑模观测器计算之间的误差
下面阐述UKF算法以及其特点。为了验证所提出的算法,在系统运行0.5 s之后增加一半的额定负载。从图4(a)可以看出,UKF在低速区域以及中高速区域显示出了更好的性能,并且完全跟踪真实的系统速度响应。如图4(b)所示,UKF的速度误差更小,这也进一步证明了上述结论。
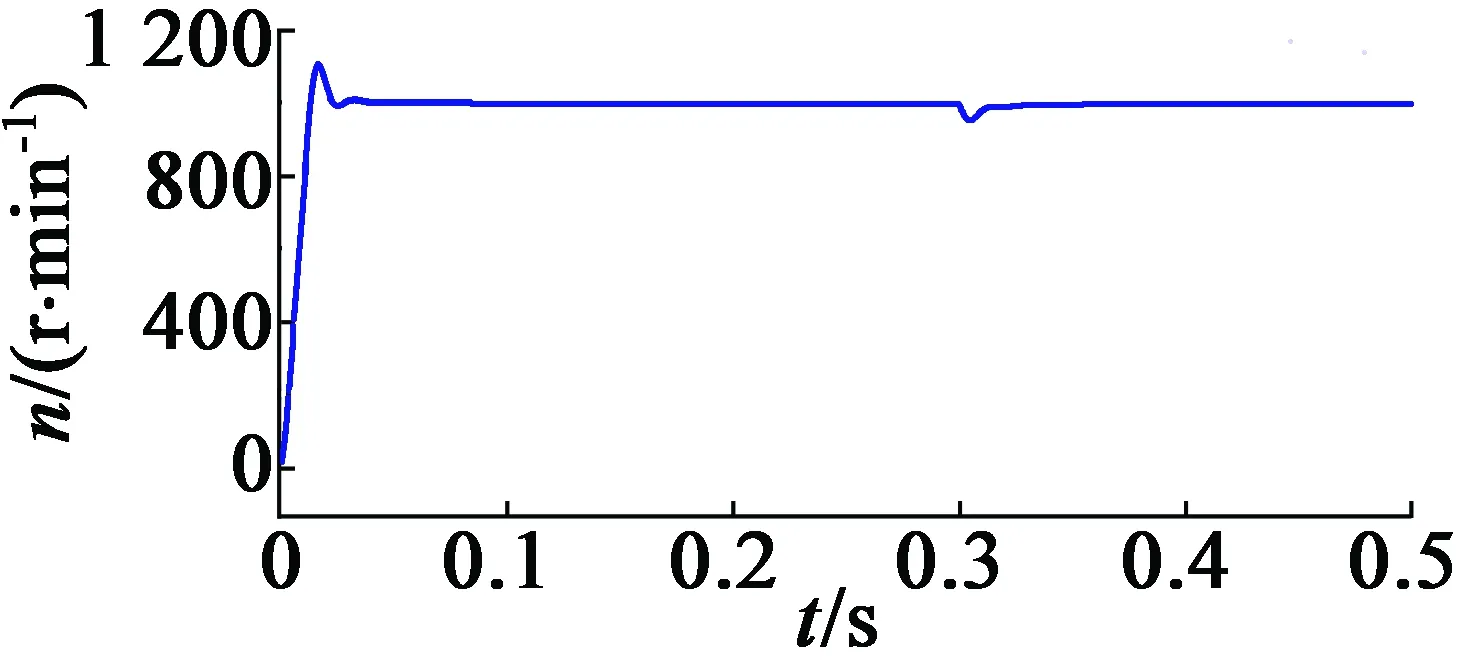
(a) 实际和UKF系统速度响应
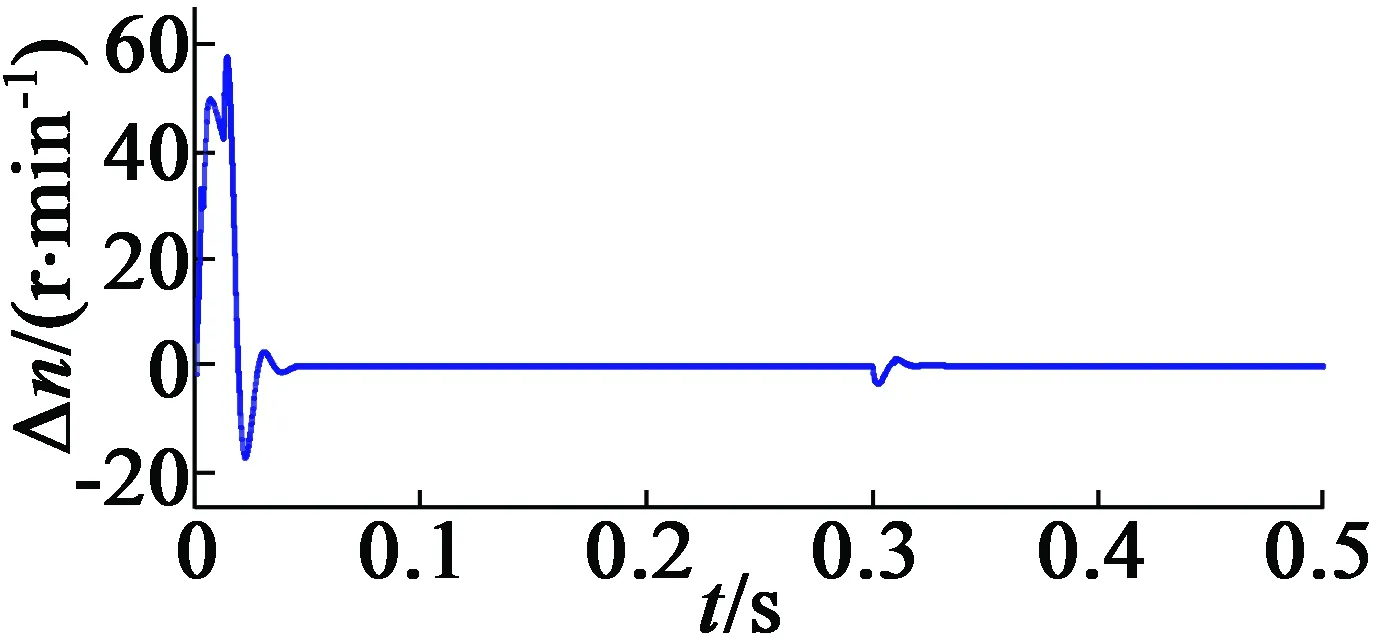
(b) 实际和UKF系统速度误差
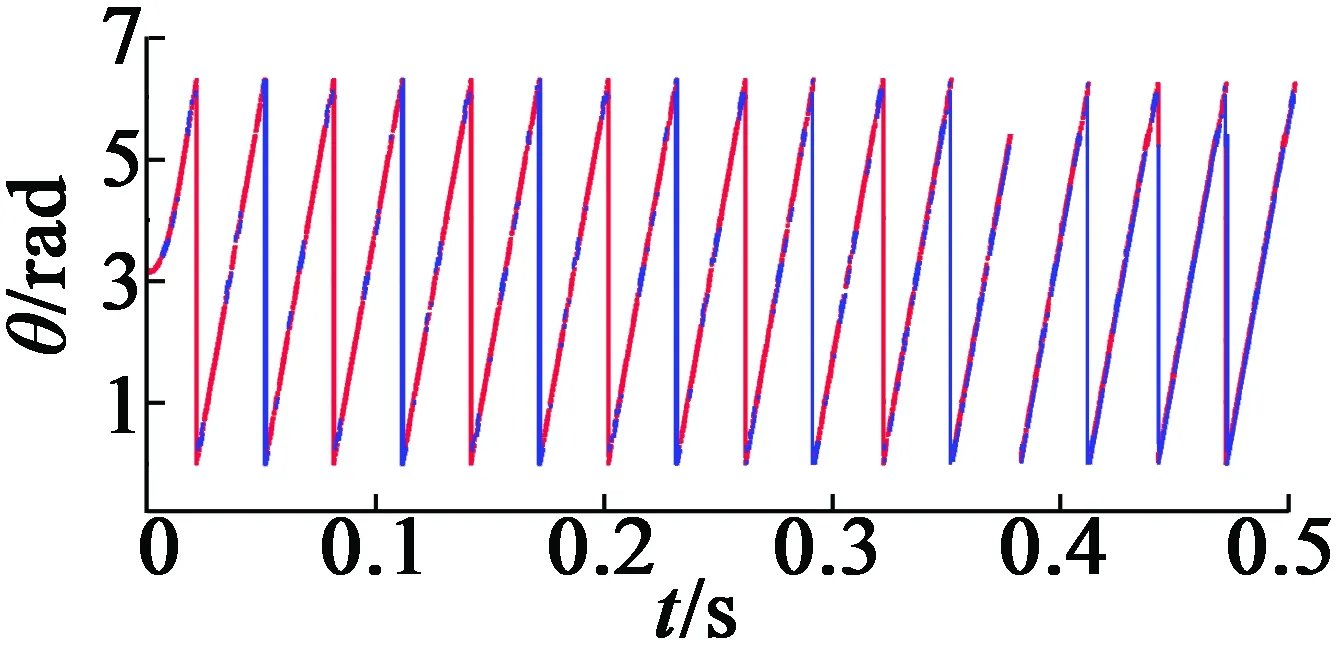
(c) 实际和UKF系统角度响应

(d) 实际系统和用UKF计算之间的角度误差
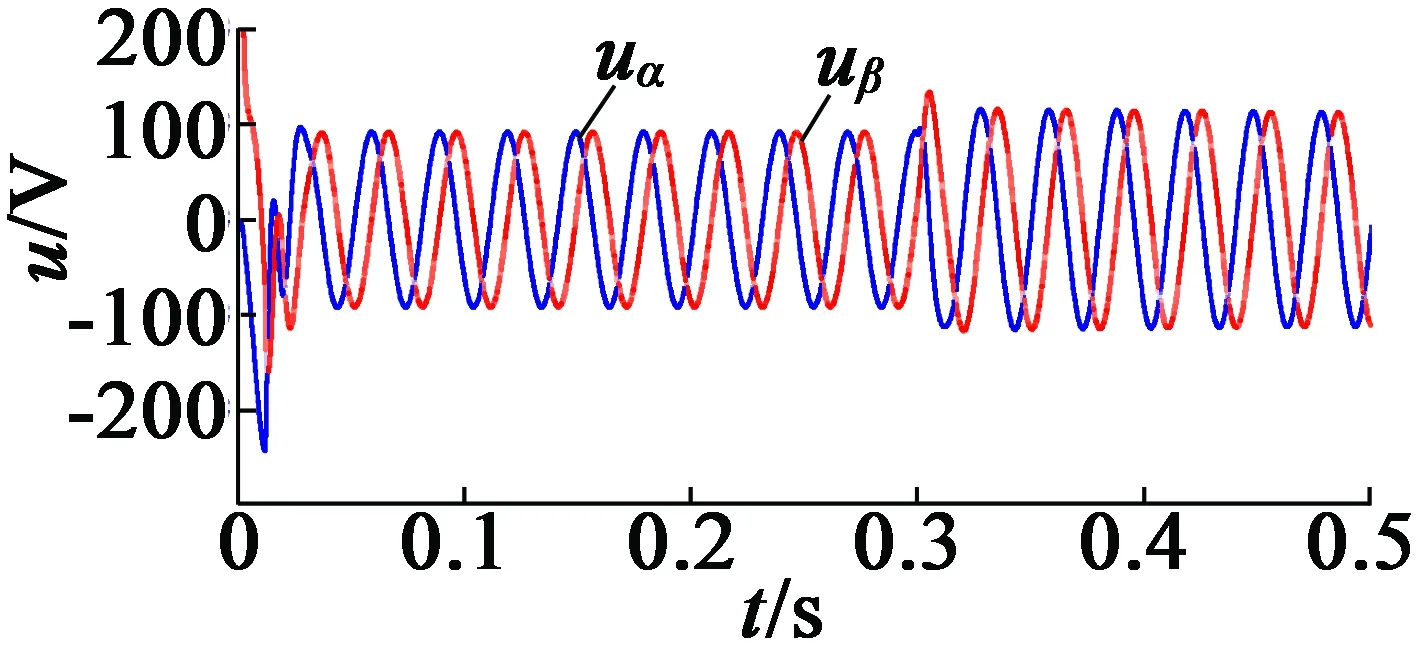
(e) UKF系统的电压响应
理论上,由于UKF的噪声抑制能力,在电机低速情况下,与基于滑模观测器的转子位置估算结果相比,UKF能够提供更可靠的转子位置估计。图5(a)和图5(b)中,基于UKF估算转子位置时,在电机低速运行的情况下,d-q轴电流估算结果噪声较少,这与UKF的噪声抑制能力有关。从图5(c)可以看出,在电机转速高于100 r/min后,可得到准确的转子位置估算结果。因此,在本文控制算法中,首先通过预设频率、幅值可调的电流矢量将电机转至100 r/min(有些文献中称为I-F控制),此后切换至基于UKF的无传感器闭环控制算法。基于上述控制方法,可使电机由静止快速切换至闭环控制,较大地缩短了起动时间,适用于对起动时间要求较快的场合。
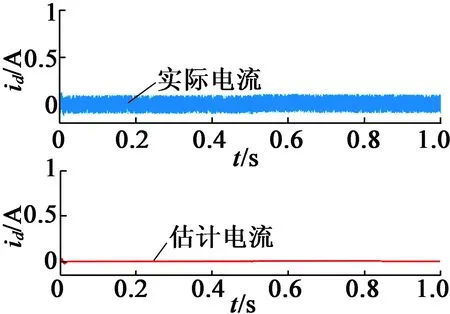
(a) 实际和UKF估计的Id电流响应
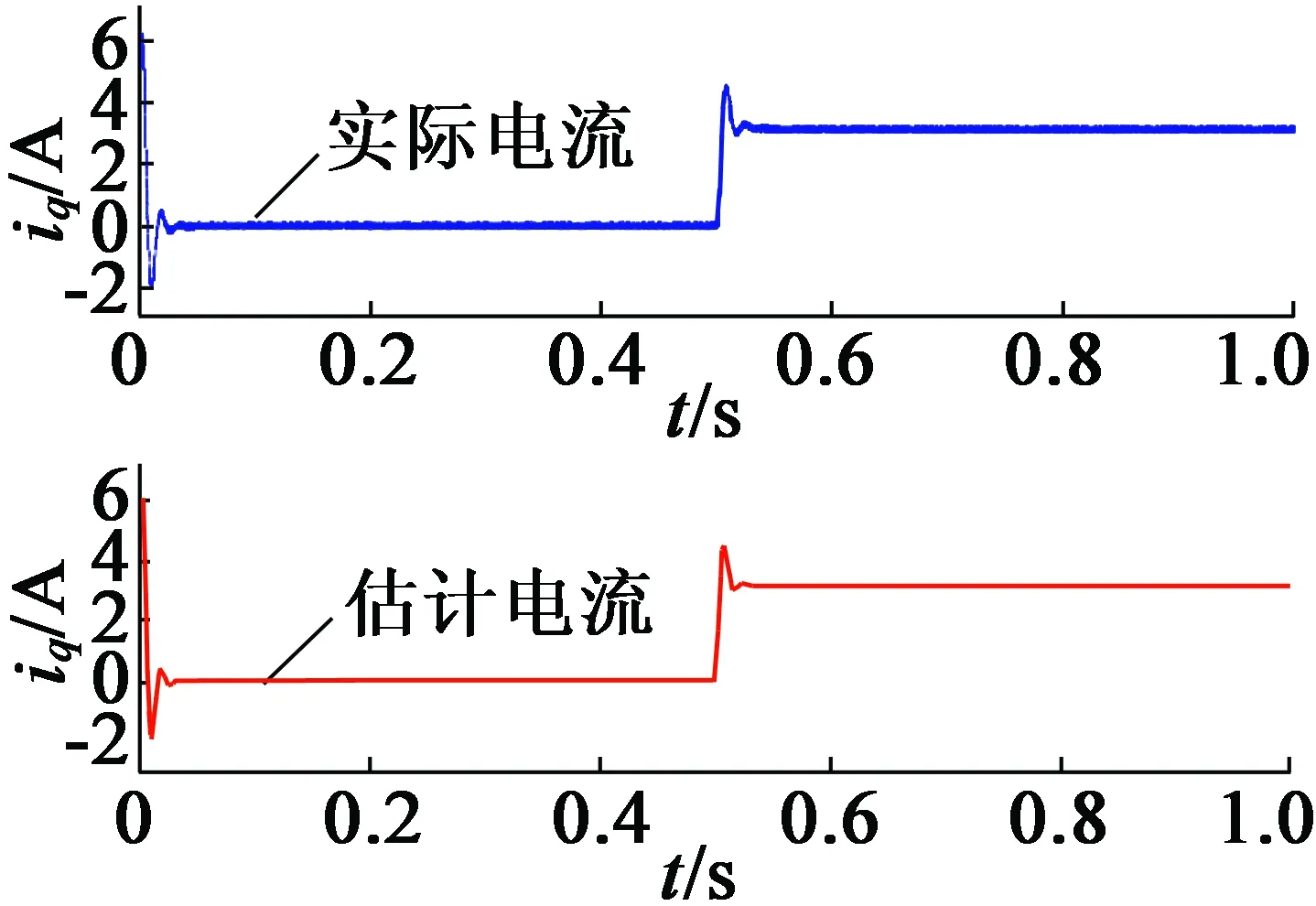
(b) 实际和UKF估计的Iq电流响应

(c) 实际和UKF系统低速响应
但是,系统的唯一缺点是它不能在定点处理器上实现,因为算法不能保证状态协方差矩阵的收敛。但在TI TMS320F28335的浮点处理器上,可以较容易地实现,该芯片的时钟频率为150 MHz,具有足够的资源在一个中断期间内计算整个无传感器控制算法。
5 结 语
本文对基于UKF的无位置传感器PMSM驱动系统进行了研究。与滑模观测器的比较表明,UKF在低速区域给出更精确的位置和速度估计,而且由于不需要使用附加的起动技术,UKF可以应用于更广泛的领域。特别地,UKF在跟踪瞬变期间的速度方面执行得更好。同时,对于PMSM驱动器内存在的噪声,UKF的性能优于滑模观测器,并且在扩展速度范围内控制仍然有效。UKF算法比滑模观测器更复杂,因此运算量要大得多。为了成功实现基于UKF的无传感器PMSM驱动,必须选择高性能的DSP。