宁波港四期2、3号泊位非常规潮水涨水区向左掉头靠泊的体会
2019-04-24李进
摘 要:根据宁波港四期集装箱码头2、3号泊位所处的特殊地理位置和潮水特点,通过引航实践,探索集装箱船舶在非常规潮水、外落里涨时期,在码头边涨水区进行向左掉头靠泊的可行性与操作要点。
关键词:外落里涨;涨水区内;向左掉头;靠泊
从码头开港初期到现在,涨水靠泊宁波港四期2、3号泊位,大多数引航员是在距离白鸭山和码头各1.0 n mile处,控制余速6 kn左右,向左掉头靠泊。随着船舶大型化,一些深吃水船在四期码头对开,外面航道落水,码头前沿涨水,即外落里涨时期,经常出现船舶在向左掉头的过程中,遇到潮水切变线,船艏受到向右涨潮水推力,而船艉受到向左落潮水推力,产生和向左转船力矩效果相反的强大的不利力矩,船舶转向变缓,直至转不動,甚至反而向右转的问题。很多高级别引航员在码头前沿进行摸索,有的做法是在4、5号泊位外面掉好头,再倒回来靠泊;有的做法是在码头边涨水区内向右掉头靠泊;有的做法是在码头边向左掉头靠泊,而向左掉头靠泊,因为船艏对着码头,外加此处水流比较急,给引航员造成的心理压力是很大的。本人结合跟随高级引航员师傅在码头对开水域涨水区向左掉头靠泊的实践经验,增强了大型集装箱船在2、3号泊位外面涨水区内向左掉头靠泊的信心,在随后的若干次引航实践中自己也多次顺利地完成了向左掉头靠泊2、3号泊位的作业。本文就集装箱船舶在2、3号泊位对开涨水区内顺流向左如何完成掉头靠泊进行阐述,与各位同行共同探讨和分享。
1 四期码头2、3号泊位对开水域环境简介
宁波港四期集装箱码头(2-6号泊位)位于穿山半岛北端、牛轭江以东、竹湾嘴以西水域,码头走向: 109°~289°,码头前沿水深:1-3号泊位-15 m,4-6号泊位-17 m。潮流基本上ESE-WNW,往复流,与等深线走向大致一样。涨流流速大于落流流速,涨水时间8~8.5 h,落水大致4~4.5 h。四期码头对开的潮流切变线出现在四期的潮水非常规时段,即外落里涨时段,大约发生在镇海低潮前2.5 h到镇海低潮后1.0 h。在这个时间段内,螺头水道主航道是落潮流向,而泊位前沿水域则是相反的涨流。涨水和落水间存在明显的切变线,如图1所示。该切变线大概位于30 m和50 m等深线之间,随潮水的大小变化。一般主航道落水越急码头前沿涨水越急,越靠近50 m等深线,切变线的走向越接近30 m、50 m这两条等深线的走向。因此,在此非常规潮水时段,掉头靠泊四期2、3号泊位,如穿越切变线,向左掉头,常常遇到船舶在掉头过程中,船艏向不转,或者反而向右转向的不利局面发生。
2 码头前沿涨水区内向左掉头靠泊的可行性探讨
根据四期码头2、3号泊位外50 m等深线的位置,切变线距离码头基本上0.5~0.6 n mile。按照船舶操纵理论,在有流水域掉头,其旋回轨迹呈椭圆形,沿水流方向的范围一般为2.5~3倍船长,垂直于水流方向的范围一般为1.5~2倍船长,可见其掉头水域基本满足要求。根据力学原理,当船舶在水流和拖船的外力作用下,由于合外力方向和运动的方向不在同一条直线上,即船舶既偏转又横向移动,船舶在动态的偏转中,曲线运动中物体的速度方向时刻改变,在船舶艏艉方向的初速明显减少,而沿初始航向的横向移动速度增加。如图2所示,对于一艘行进中的船舶,当船艉受到向右的推力,船艏受到向左的推力作用,船舶将发生向左偏转,船艉偏离原先轨迹向左前方向做曲线移动,船艏则向右前方向曲线移动。在一定的初始船速以及相应拖船推力作用下,船舶发生向左运动时,其船体并不会沿新航向保持原先速度前进,而继续将在初始速度方向的轨迹轴附近进行偏转,直至转到一定的角度。
以一艘船长294 m的集装箱船“PUGWASH SENATOR”为例,吃水10 m时,排水量约为8万t,船舶重心基本位于船中附近,船艏距离重心约147 m。假设潮流向和船舶掉头前初始航向一致,流速1 kn,船速3 kn,对地速度4 kn,一般配置3艘拖船,平均每艘拖船马力为4 800 HP,在拖船和艏侧推共同作用下转向角速度(ROT)达到20°/ min~25°/ min。按船舶操纵理论,转心位置于船艏后1/5~1/3船长处,取中间值1/4,相对于船舶重心距离74 m,则在船舶重心处因转动产生的线速度为
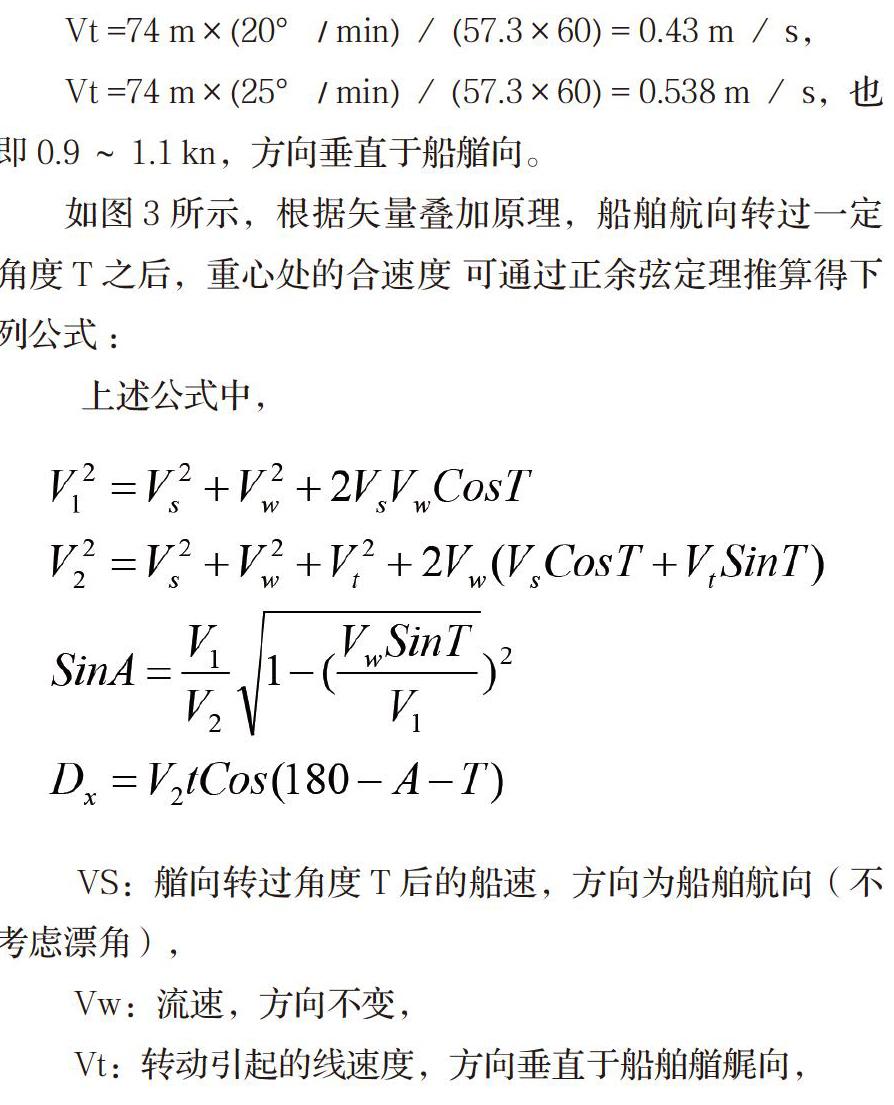
Vt =74 m×(20°/ min)/(57.3×60) = 0.43 m/s,
Vt =74 m×(25°/ min)/(57.3×60) = 0.538 m/s,也即0.9~1.1 kn,方向垂直于船艏向。
如图3所示,根据矢量叠加原理,船舶航向转过一定角度T之后,重心处的合速度 可通过正余弦定理推算得下列公式 :
上述公式中,
VS:艏向转过角度T后的船速,方向为船舶航向(不考虑漂角),
Vw:流速,方向不变,
Vt:转动引起的线速度,方向垂直于船舶艏艉向,
T:船舶发生偏转后某一时刻航向与初始航向之间的变化量,
Dx:给定时间内船舶重心的横向位移。
因为掉头过程中,速度都是瞬时线形变化,为了简便计算,我们取几个分割点,掉头过程中假定ROT为20°/ min,相应地重心 转动的线速度为0.9 kn,流速(Vw)1.0 kn。船舶转向100°需时5 min,重心处的瞬时合速度V2分别按转向达到10°/30°/50°/70°/90°的速度为平均值,假设船舶转向达10°/30°/50°/70°/90°时,由于转向过程中,斜航阻力的原因,船速可降速25%~50%。为简便运算,取降速值按平均值简取,假定船艏艉方向船速逐级下降为2.7/2.4/2.1/1.8/1.5 kn(经验估算值),经简算求得船舶重心处(矢量)每分钟的横向位移分别为(-24,25,61,83,90) m,则船舶航向转过100°时重心横向位移为98 m。当流速达2 kn、船速仍为3 kn时,依据上述公式求得船舶转过100°重心的横向位移186 m,船舶初始航向上流致漂移距离D,按经验公式估算:
D=T × Vw×80%。
上述公式中,
D:漂移距离(单位 m),
Vw:流速( m/s),
T:船舶发生偏转180°时间(s)。
按船舶转向90°时,流速1.0 kn,估算值为216 m。流速2 kn时,估算值为432 m。
由此可以认为,船舶重心的横向位移值介于98~186 m间,远远小于初始航向的流致漂移距离216~432 m。根据引航实践经验,船舶在掉头过程中GPS显示的船舶轨迹基本与流向保持较小的角度。船舶在转向度达到90°,即船向垂直码头时,船舶速度矢量方向大致还是平行于码头方向,矢量COG还是接近270°~280°。转向达到90°以上,即HDG接近200°時候,船舶速度矢量才开始往码头方向。船舶速度矢量方向如图4、图5。
图6中实例雷达数据 :当船舶码头边掉头,转到船艏向(HDG) 为181.9°,船舶矢量向(COG)为237.3°,船舶艏艉方向速度(SPD)衰减的还有0.6 kn,矢量速度(SOG)1.1 kn指向3号泊位。此时驾驶台距离码头泊位还有0.28 n mile,驾驶台距离船首223 m,则船艏距离码头距离D还有295 m(D=0.28×1852-223)。
从以上几点来分析,基本上在涨水区,在码头前沿水域保持与码头平行的航向,保持3.0 Cable的距离,在拖船和侧推的作用下,向左掉头是可行的。以船长294 m船舶为例,流速1 kn,提早1.1 Cable;流速2 kn,提早2~3 Cable掉头是可行的。如图7所示,GPS的蓝色轨迹基本平行于码头。
3 外落里涨、码头边涨水区内向左掉头靠泊实例
实例1:2015年5月2日,“EVER DYNA MIC”(“长威”轮),船舶总长294.13 m,船宽32.22 m,总吨52 090 ton,吃水11.3 m,计划17:30靠泊四期3号泊位,当天镇海低潮时16:27,潮高67 cm,风向SE约3 m/s。约17:00抵达远东集装箱码头外面。距离泊位1 n mile速度减至6 kn,3艘协助靠泊拖船:“拖31”(7 200 HP)带左船头;“拖25”(4 000 HP)驾驶台左下面顶推,不带缆绳;“消拖10”(5 600 HP)带左船艉:拖船带妥后停车淌航,并适时进车稳定船首向在285°附近,与码头横向距离保持在3.0 Cable,船艏到达4号泊位,速度5.0 kn,开始正舵,微速退,然后令左舷船艉的2艘拖船“拖25”“消拖10”,快车顶,矢量速度降到2.8 kn,主机停车,如图8(a)所示。令船头左舷“拖31”拖船慢车顶,首侧推配合向右,控制着转头角速度(ROT)在20°左右,如图8(b)所示。当船艏向垂直于码头时,驾驶台距离码头为0.26 n mile,约425 m,除去船艏到驾驶台距离223 m,船艏距离码头约258 m。此时,船艏向船速衰减很快,才0.7 kn,赶紧进车,防止船转过来后,船后缩,如图8(c)所示。3艘拖船和首侧推配合着,2倍船宽(2B)距离码头,与码头夹角控制在15°,“消拖10”松缆到拖的位置,侧推停,用“拖31”“拖25”调整靠泊角度1倍船宽,夹角10°,如图8(d)所示;直至平行靠码头。
实例2:2015年6月8日,“HH JOHNNA”轮 船长294 m,船宽32.2 m,总吨52 090 ton,吃水12.2 m,计划22:15靠泊四期3号泊位,镇海低潮21:09,潮高88 cm,风向SW约4 m/s。3艘拖船:“众联1号”(4 800 HP),“众联8号”(4 800 HP),“拖7”(4 200 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例3:2015年6月14日,“ MAERSK COTONOU”轮船长249.12 m,船宽37.4 m,总吨 50 860 ton,吃水9.5 m,计划01:45靠四期2号泊位。当日镇海低潮时3:13,潮高110 cm,微风。2艘拖船:“消拖2号”(5 200 HP),“拖26”(4 000 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例4:2015年7月4日,“EVER DIA MOND”轮船长294.1 m,船宽32.2 m,总吨52 090 ton,吃水10.0 m,计划9:00靠泊四期3号泊位,镇海低潮06:39,潮高81 cm,风向SE约4 m/s。2艘拖船:“众联6号”(4 800 HP),“众联7号”(4 800 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例5:2016年3月29日,“EVER LOGIC”船长335 m,船宽46 m,总吨98 882 ton,吃水10.0 m,计划17:45靠泊四期2号泊位,镇海低潮20:24,潮高69 cm,风向SE约4 m/s。3艘拖船:“众联1号”(4 800 HP)、“众联12号”(4 000 HP),“拖31”(7 200 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例6:2016年4月25日,“MSC ANNICK ”轮船长260.6 m,船宽32.25 m,总吨40 306 ton,吃水12.0 m,计划07:00靠泊四期2号泊位,镇海低潮6:58,潮高82 cm,风向SW约3 m/s。2艘拖船:“拖25”(4 000 HP),“拖30”(4 800 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例7:2016年7月11日,“MSC SILVANA”轮船长332 m,船宽43.2 m,总吨94 489 ton,吃水12.0 m,计划8:45靠泊四期3号泊位,镇海低潮09:57,潮高123 cm,风向SE约5 m/s。2艘拖船:“消拖2号”(5 200 HP),“众联15号”(4 800 HP)。在拖船及侧推共同作用下顺利靠妥。
实例8:2016年10月12日,“SL CHARGER ”轮船长292.2 m,船宽32.2 m,总吨49 985 ton,吃水11.3 m,计划13:30靠泊四期2号泊位,镇海低潮13:52,潮高133 cm,风向NE约4 m/s。2艘拖船“拖22”(4 800 HP),“众联15号”(4 800 HP)。在拖船及侧推共同作用下顺利靠妥。
实例9:2017年3月11日,“EVER LIFTING”轮船长334.8 m,船宽45.8 m,总吨99 946 ton,吃水11.2 m,计划3:30靠四期3号泊位。当日镇海低潮时4:14,潮高39 cm,微风。2艘拖船:“消拖2号”(5 200 HP),“拖21”(4 800 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例10:2017年5月28日,“APL YANGSHAN”轮船长347 m,船宽45.2 m,总吨128 929 ton,吃水12.5 m,计划20:15靠四期3号泊位。当日镇海低潮时18:52,潮高11 cm,风向SE约5 m/s。2艘拖船:“消拖2号”(5 200 HP),“拖30”(4 800 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例11:2017年12月15日,“MSC SARA ELENA”轮船长299.95 m,船宽48.2 m,总吨9 5497 ton,吃水12 m,计划4:00靠四期2号泊位。当日镇海低潮时03:05,潮高73 cm,风向NE约5 m/s。3艘拖船:“消拖5号”(5 600 HP),“拖22”(4 800 HP),“众联1”(4 800 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
实例12:2018年4月15日,“MSC DESIREE”轮船长299.9 m,船宽48.2 m,总吨 96 816 ton,吃水12.0 m,计划18:00靠四期3号泊位。当日镇海低潮时17:05,潮高40 cm,微风。2艘拖船:“众联3号”(4 800 HP),“众联7号”(4 800 HP)。在拖船及侧推共同作用下移向码头直至顺利靠妥。
4 涨水区内向左掉头操船要点
4.1 船速的控制
在涨水区内进行靠泊,余速的控制是关键因素之一,关系主机倒车能否开出,拖船带缆绳的顺利程度等。由于顺水的原因,船舶减速过程是相对漫长的,大型集装箱船舶通过中宅散矿码头时候,就要把船速降下来,控制在距离泊位2.0 n mile时 8~10 kn内,严格控制距离泊位1.0 n mile 时6 kn以内,以便拖船在1.0 n mile外带妥缆绳,拖船缆绳带好,掉头靠泊的压力将大大减轻。具体操作方法:
(1)提早停车淌航,使主机转速尽早归零,由于顺水的原因,船速一般在6 kn左右,这样螺旋桨转速归零就需要很长的时间,一定要心里保持警惕,盯牢主机转速归零。
(2)二次倒车法。由于停车淌航过程中,顺水舵效差,要稳定住船艏向,就要不时地短时间进车,以增加舵效。这样就造成船速一直在5~6 kn左右,减不下来。所以,距离泊位还有2 Cable左右,可适时先倒一车,先把船速降下来,原则上控制在4 kn以下,就要停车。好处是4 kn以下速度,更加方便第二次倒车的开出。假如出现第一次倒车开不出来,可及早采取应急措施,包括船艉拖船朝后拖,减速,以及应急锚泊,甚至可以进车向右转向驶离码头边。
(3)利用拖船减速。大型集装箱船舶,船艏往往有大马力侧推器。所以船艉一般我们配置1艘大马力拖船,1.0 n mile外带好拖轮缆绳,就可以让船艉的大马力拖船朝后松缆,以备主机倒车开不出,甚至主动利用拖船朝后拖,来控制船舶余速,起到减速作用。优点是利用拖船朝后拖,还没有倒车偏转效应。
4.2 船艏与码头泊位前沿的距离
在码头边涨水区内,顺水,船舶平行码头距离3.0 Cable向左掉头,还要克服心理上的压力,一般驾驶台到泊位前沿距离在2.0 Cable之内,基本上在船艏盲区里面,在船舶转向至船艏垂直于码头时,要观测船艏到泊位前沿的距离,有很多的方法可用。
(1)要求船艏带班船大副在船头观测至泊位的距离,不时地向驾驶台汇报船艏距至泊位距离的变化,以及距离减少或者增加的趋势。
(2)利用雷达准确的测距功能,量程可以调节到0.5 n mile或者随着距离码头的进一步减少,进一步调节到0.25 n mile。利用雷达的两个活动距标圈,参考引航卡上的驾驶台到船艏的距离,例如223 m,就设定0.12 n mile的数值,即标出船艏的位置。另外一个活动距标圈跟着船舶的移动,随时保持调节,始终保持相切于码头前沿。这样两个距标圈之间的差值即船艏至泊位的距离。这个数值也大致判断船舶前冲或者后缩的趋势。
(3)雷达航仪显示屏上有船舶艏艉方向的一个速度值,可用来判断船舶前进或者后缩的趋势,一旦发现要有后缩趋势,应及时进车。还有一个船舶整体运动的矢量速度,通过观测这个数值以及方向变化,来控制拖轮,侧推器,使船舶保持合适的转向角速度。一旦近距离,人站到驾驶台外面,就要参考吊机等参照物,来判断船舶的整体横移靠泊速度。通过对拖轮、侧推器、主机、舵等,保持合适的横移速度来平行靠泊。
4.3 船舶掉头前与泊位之间的横距
要结合现场流速、船舶主机马力情况、老旧程度等工况、拖轮的配置、风的影响等情况,吹拢风影响不是很大的时候,基本上控制在3.0 Cable,并根据情况变化采取增减。但是最好不要小于2.5 Cable的横距,留出足够的安全余量。在船舶掉头前,航向一般把定在285°~290°之间,来控制船位。
4.4 掉头时机的把握
流速缓慢,可以在船艏还剩半个船长时,倒车加上拖船、侧推器的配合采取掉头。如果水流急、余速快,可以提前1.0 Cable或者2.0 Cable开始掉头。控制转向角速度,使船舶完成掉头后,驾驶台距离泊位N字旗略微后面一些位置,方便进车。有些船舶重载,吃水大,遇流急,防止压拢过快不利局面发生,可以提早掉好头,再慢慢依靠水流退下来靠泊。
5 注意事项
(1)提早聯系码头调度,确定泊位情况、有无船舶靠离泊、是否要接离泊船的泊位。因为远东码头对开,就顺水了,以免码头船舶泊位没有清爽,就进到涨水区内。
(2)早联系拖船,及早到位。因顺流船舶余速快,所以拖船带缆需要一些时间。
(3)双锚备好,处于应急锚泊状态。
(4)在掉头主机倒车过程中,船速控制在3 kn以下,即可停车,以免船舶掉头过程中,速度递减太快,发生船舶后缩现象。
(5)左舷船艉的大马力拖船在进入掉头区域前必须带妥,以备应急之需。
(6)掉头过程中,应密切关注船舶艏艉向的速度。一旦发现快要后缩趋势,及早进车,缩小与码头的距离,依靠进车来控制船舶矢量速度的方向。
6 结束语
经过个人引领若干艘次船长分别为260 m、294 m、300 m、333 m、347 m船舶掉头靠泊该码头的经验,以及跟随高级引航员引领船长366 m船舶在3号泊位外面掉头的实例,本人认为在四期集装箱码头外落里涨的非常规潮水时段内靠泊2、3号泊位,在码头前沿涨水区内向左掉头是可行的。
以上所述只是本人一些浅见,不足之处敬请同行指正。
参考文献
[1] 龚雪根,杲庆林,等.船舶操纵[M].1版.北京:人民交通出版社,2003:48-50.
[2] 潘国华,陈杰,胡中敬,尤庆华,胡甚平.集装箱船舶顺流靠泊风险评估与操作要领[J].中国航海,2013,36(4):143-146.
[3] 胡吉华.梅山港区集装箱船掉头靠泊[J].航海技术,2015(1):8-11.
作者简介:
李进,一级引航员,(E- mail)409500296@qq.co m
