基于速度先验的单平台快速动目标无源定位技术
2019-04-24苗利军陈子晗
苗利军,江 漫,陈子晗
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.中国科学技术大学 数学科学学院,安徽 合肥 230026))
0 引言
根据观测平台的数量,无源定位系统可以划分为单平台定位[1]和多平台[2]协同无源定位,由于多平台无源定位需要平台之间严格同步并进行大量的数据传送,这使得多站之间的数据连接与通信成为一个难题,限制了定位系统的机动性,这往往难以满足战场态势变化和隐蔽性的要求[3],而单站无源被动定位法只使用单平台,减少了定位的约束条件并增强了可操作性。
单平台无源定位方法的理论较为成熟,方法多样,但都有一定的局限,如测向无源定位法[4-5],原理简单,但是可观测性问题突出,在实际应用中受到了限制[6],相位差变化率[7-9]、联合测向和相位差变化率[10]、目标径向加速度[11]、视在加速度[12]、测向联合多普勒频率[13]或多普勒频率变化率[14]以及多站时差定位技术[15-17],对参数估计的精度要求较为苛刻且收敛速度比较慢。
如果能够利用先验信息[18],定位收敛速度会有很大提高。基于此,本文提出了基于速度先验的单平台无源定位技术。对于典型的运动辐射源,其巡航速度范围通常是已知的。利用速度先验信息与测向信息联合估计目标的位置信息,通过公式推导和算法仿真,验证了算法的性能。
1 定位原理及观测模型
1.1 定位原理
对于典型的运动辐射源,其巡航速度范围通常是已知的。利用这一先验信息与测向信息联合估计目标的位置信息。
对于匀速运动辐射源,利用初始时刻t0辐射源到目标的初始距离r0、初始时刻角度β0、航向α、航速v以及观测时刻tk,即可得到不同时刻的辐射源位置:
(1)
匀速运动辐射源运动场景示意图如图1所示,将初始距离r0、初始时刻角度β0、航向α和航速v作为估计量,对辐射源的运动状态进行分析。
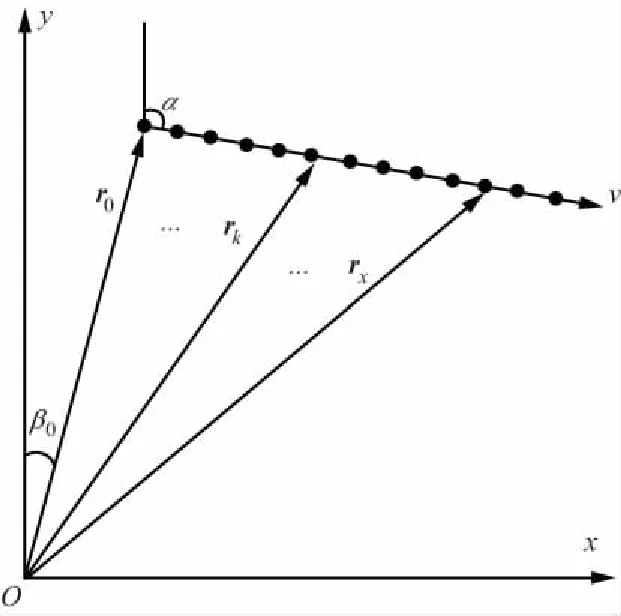
图1 匀速运动辐射源运动场景示意图
初始时刻角度β0可以通过测向设备得到,而辐射源航速v信息假设通过先验信息获得,因此只需将初始距离r0和航向α作为待估计量,分析辐射源的运动状态。
1.2 观测模型
角度是单站无源定位系统必须的观测量,而角度变化率也可通过测相位差变化率或直接利用角度拟合得到。
二维条件下得到方位角为:
(2)
式(2)为角度变化率的表达式,实际中βk可以由干涉仪等多种途径获得,在定位观测量提取算法原理中已进行了分析。
假设辐射源航速v已知,实际上由于辐射源为非合作目标,因此航速v的具体数值并不能精确已知,只能获得辐射源运动速度的一个或多个大致范围。在下文研究中,通过估计量的偏差分析,研究航速先验信息的偏差对估计量的影响。
2 目标运动分析算法
在计算目标具体位置的时候,首先通过代数解法,计算初值,由于给定的速度初始值可能并不准确,因此后续需要通过迭代解法进行迭代计算。
2.1 代数解法
利用角度和航向速度先验信息,估计运动辐射源的初始距离r0、航向α。
(3)
不失一般性,假设等时间间隔T获得角度观测量,即有tk-t0=kT。
进而可得:
(4)
等式两边交叉相乘可得:
kTvcosβksinα/r0-kTvsinβkcosα/r0=
sinβkcosβ0-cosβksinβ0。
(5)
将sinα/r0和cosα/r0作为待估计量,并将K组观测量写为矩阵形式可得:
Hu=b,
(6)
其中,对应量为:
(7)
从而得到辐射源的初始距离和航向的估计值为:
(8)
2.2 迭代解法
对于匀速运动辐射源,根据角度的定义有:
(9)
(10)

(11)
其中,

(12)
将K组观测量写为矩阵形式可得
HΔ=b+δ,
(13)
其中,对应量为:
(14)



利用该初始值按照上述流程再次计算得到辐射源初始距离和航向。迭代计算终止的条件可选择满足最大迭代次数或2次迭代结果之间的差异小于某一门限值。
3 仿真实验
考虑辐射源初始时刻与地面固定观测站的初始距离为100 km,辐射源与观测站连线与真北方向的夹角为15°,辐射源匀速运动速度为250 m/s,航向为90°。辐射源信号频率为3 GHz。地面固定观测站位于原点位置,测相位差变化率的基线长度为15 m,测向基线长度为1 m,信号观测时间为350 s。
测向误差0.25°,速度偏差1%下跟踪滤波结果如图2所示。
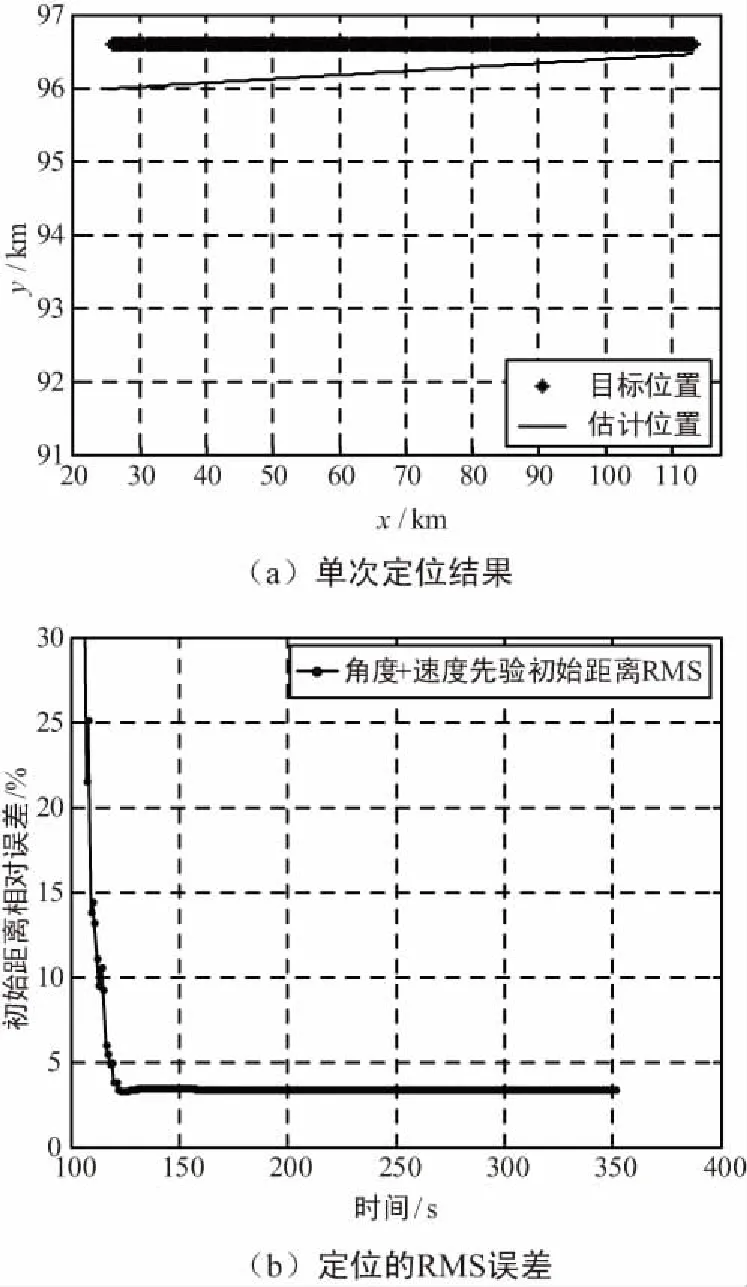
图2 测向误差0.25°,速度偏差1%定位跟踪滤波结果
测向误差0.7°,速度偏差1%下跟踪滤波结果如图3所示。
测向误差0.7°,速度偏差5%下跟踪滤波结果如图4所示。
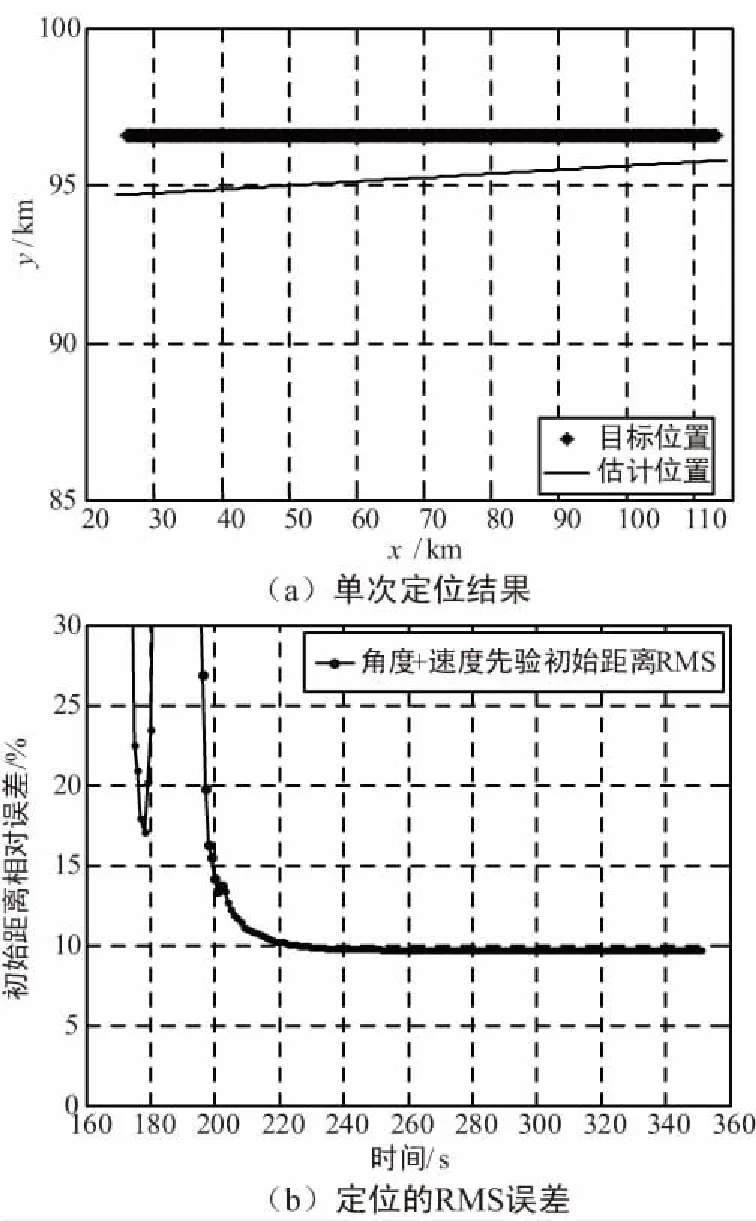
图3 测向误差0.7°,速度偏差1%定位跟踪滤波结果
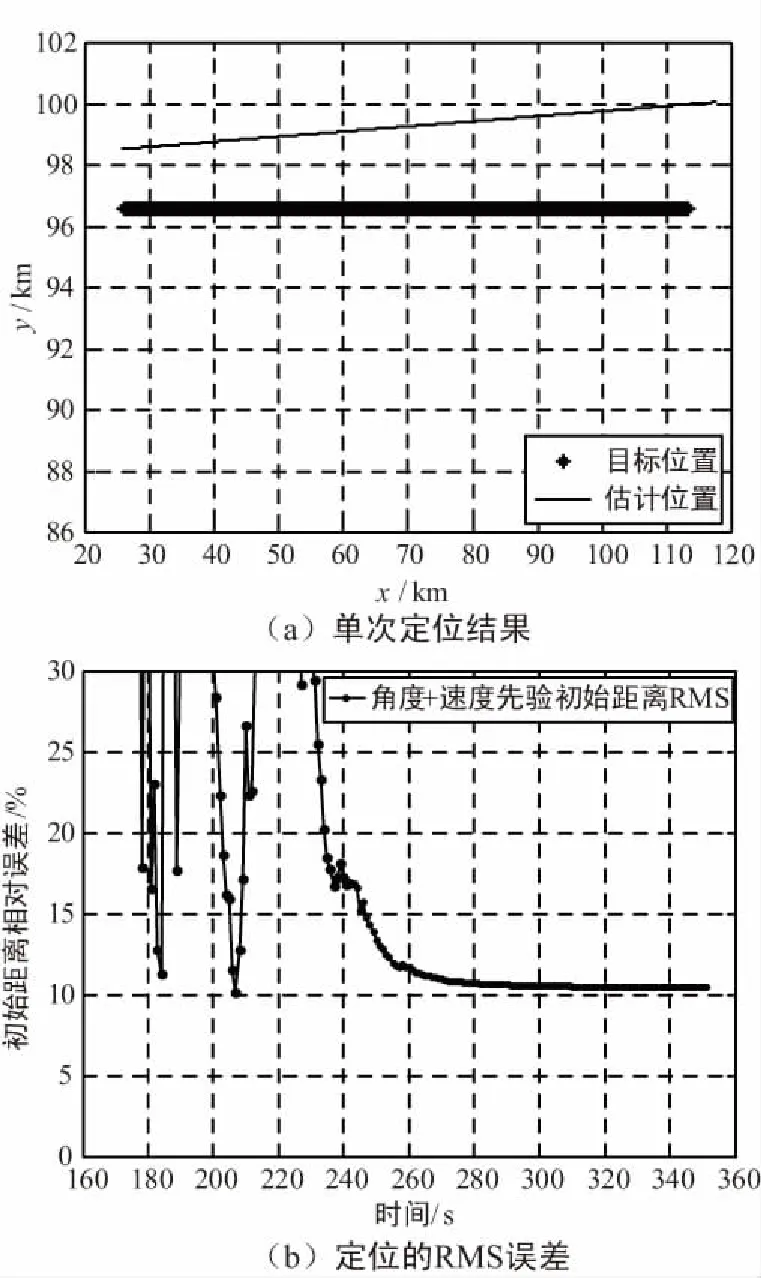
图4 测向误差0.7°,速度偏差5%定位跟踪滤波结果
测向+速度先验定位跟踪滤波方法,可实现固定单站对匀速运动辐射源的定位跟踪,且定位精度和定位时间随着测向误差和速度误差的增大而增大,但这种定位跟踪的结果存在最大的问题是相对定位偏差的大小取决于测向误差和速度误差。但其优点也很明显,因为其不需要太多观测量,定位解算速度较快,对运动辐射源的运动形态没有明显要求,所以无论是软件算法的计算量还是以后在实际应用中,对硬件设备的要求都相对较低。
4 结束语
基于单个观测平台,利用测向信息和先验速度信息,建立了定位的模型,突破了传统的完全没有先验信息的定位。对算法进行了详细的推导和计算机仿真,仿真结果表明利用速度先验信息和测向可以实现匀速运动目标的定位,且新算法在计算量和复杂度方面都有很大改善。但是此定位方法还存在定位收敛速度较慢且定位误差随着速度误差和测向误差的增大而增大的缺点,后续需要进一改进算法,使其更具适应性。