跟踪微分器在光电火控系统中的应用
2019-04-23杨文光武亮明张建伟
李 静,杨文光,武亮明,张建伟
(北方自动控制技术研究所,太原 030006)
0 引言
防空高炮光电火控系统(以下简称光电火控系统)主要由光电跟踪系统、火控计算机、火炮随动系统组成[1]。对于光电跟踪系统,当目标进入探测器视场中,视频取差器会获取目标相对于视场中心的偏差角度,以此偏差量作为误差,控制光电跟踪系统的伺服转台转动以跟踪目标。由于视频取差器运算、数据传输都需要时间,所以光电跟踪系统所接收到的偏差量其实是滞后的,这直接影响了系统的跟踪性能;火炮随动系统常随动于光电跟踪系统进行,火控机为火炮随动系统提供位置指令驱使其运动,当大系统内存在干扰时,随动很可能将其放大进而无法实现平稳跟踪,进而影响目标的精确打击。
非线性跟踪微分器[2]主要用于解决在带随机噪声的测量信号中,对其进行滤波并且合理提取其微分信号的问题,故跟踪微分器在电动机控制[3]、机器人[4]、飞行器[5]等控制系统中有广泛的应用。本文利用非线性跟踪微分器,通过光电转台位置与随动位置,得到滤波后的目标位置,以此来驱动随动运动,同时还提取出目标速度,用来对取差量进行预测。仿真和试验证明,采用非线性跟踪微分器的光电火控系统,在跟踪精度上有明显的提升。
1 跟踪微分器
一个二阶跟踪微分器可以用如下定理来描述。
定理1:若系统
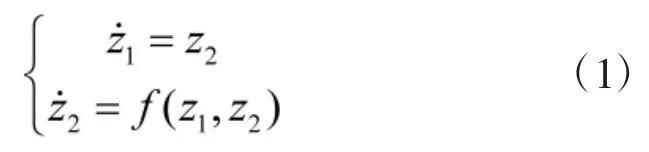
式(1)的所有解都有界且满足:

则对任意有界可测函数 v(t),t∈[0,+∞]和任意T>0,微分方程
式(1)的解x1(r,t)满足

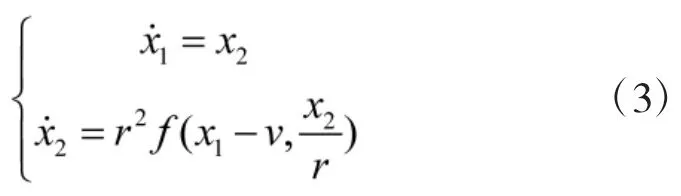
其中,r为跟踪速度因子,v为参考输入。定理说明,随着参数r的增大,系统的解x1(r,t)在有限时间内,都能充分地逼近输入信号v(t),从而可以把x1(r,t)的微分x2(r,t)当作输入信号v(t)的微分信号。
式(3)中,根据不同的加速度函数式f,可以构造出不同的跟踪微分器[6]。一种具体的跟踪微分器—离散最速型跟踪微分器[7]形式为:

其中:T为采样时间,fhan函数形式为:
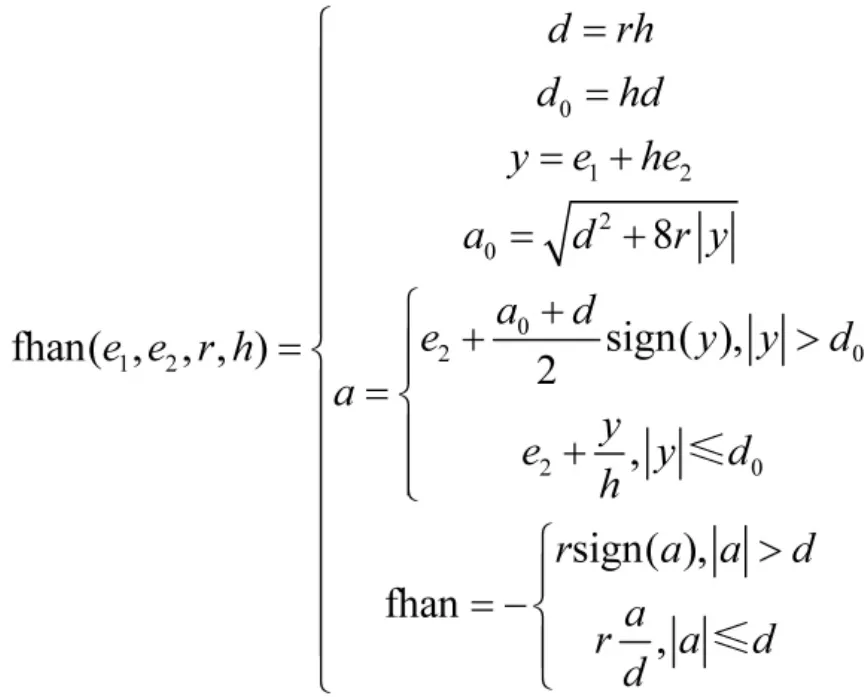
r和h分别为速度因子和滤波因子。
2 跟踪微分器应用于光电火控系统
对于光电火控系统高低向,光电跟踪系统与火炮随动系统无耦合,且目标高低向最大角速度通常远低于方位向最大角速度,故本文只考虑对方位向的控制策略进行改进,光电火控系统一般控制结构如图1所示[8]。
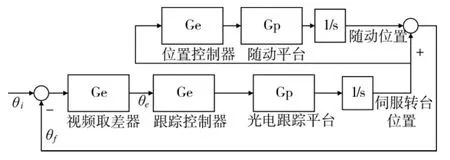
图1 光电火控系统一般控制结构
在跟踪目标时,目标在系统坐标系下的空间角为θi,系统的指向角为θf,二者存在的偏差角度θe通过视频取差器测量得到。光电跟踪系统主要通过闭环控制来主动消差,火炮随动系统则随动于伺服,通过消除与伺服转台的位置偏差,来驱动其运动。
因为视频取差器运算以及数据传输会使得误差量θe存在滞后,尤其是在过航点附近,目标速度较大时,时间滞后对系统跟踪带来的影响会更大,所以考虑对取差值作预测处理;大系统中难免会引入一些干扰,而火炮随动系统因为惯量较大,模型复杂,很容易对干扰进行放大,进一步使大系统平稳性变差,因此,考虑对火炮随动系统指令作滤波处理,避免将干扰引入火炮随动系统。
在系统对目标进行跟踪时,伺服转台位置与随动位置的和可等效地看成目标位置,以此作为输入,通过离散最速跟踪微分器可得到滤波后的目标位置θi',并提取出其微分信号,也即目标速度wi'。采用跟踪微分器的光电火控系统控制结构图如图2所示。
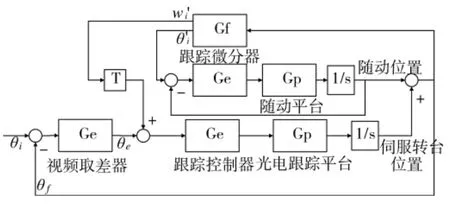
图2 采用跟踪微分器的光电火控系统控制结构图
在得到滤波目标位置θi'和目标速度wi'后,一方面,通过θe+wi'×t公式对跟踪误差进行预测(其中t为视频取差器的滞后时间,一般由厂家提供或通过试验测试得到),以弥补取差值的滞后,图2中的T环节代表此预测处理环节;另一方面,利用θi'作为随动系统的位置指令,如图2中随动位置闭环所示。
3 仿真与试验
使用MATLAB对跟踪微分器的滤波和微分特性进行仿真,首先生成匀速直线模拟航路,对生成位置曲线离散化并加入一定噪声,以此作为位置输入,利用跟踪微分器对其进行滤波和速度求取,仿真结果如图3~图5所示。
从仿真结果可以看到,跟踪微分器可以较好地对位置信号进行还原以及对其速度信号进行提取。
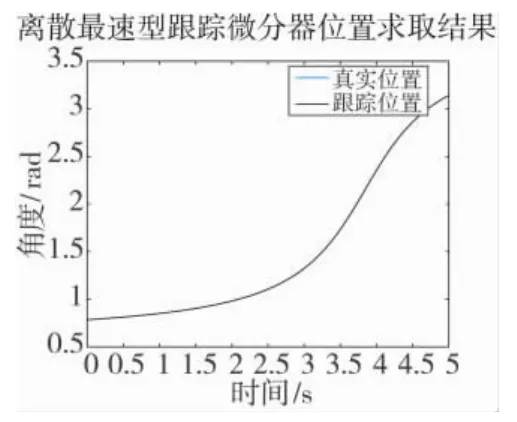
图3 跟踪微分器位置求取结果
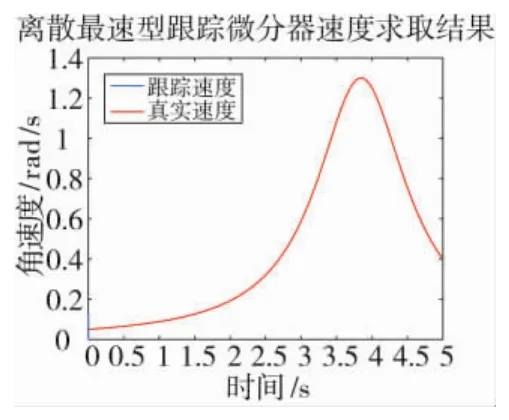
图4 跟踪微分器速度求取结果
为验证采用跟踪微分器的光电火控系统在跟踪性能方面的优越性,选择某防空武器系统,共进行了两组试验。
试验1:令系统对匀角速度圆周运动目标进行跟踪,加入一定扰动后,原有光电跟踪系统的跟踪误差如图6所示,图中横坐标为采样点,采样间隔为20 ms,可以看到,误差峰值为4 mrad。其他策略保持不变,采用跟踪微分器进行目标位置滤波后,用滤波后的位置作为随动系统的位置指令,此时光电跟踪系统跟踪误差如图7所示,误差峰值下降到0.06 mrad。
试验2:对匀速直线运动航路进行跟踪,并对自动跟踪模式开始到过航处进行误差统计,其他策略保持不变,加视频取差器误差预测前后的跟踪误差图分别如图8和图9所示。从结果中可以看到,加误差预测前过航处跟踪误差接近1 mrad,而添加误差预测策略的系统在过航处误差降到0.1 mrad以内,其系统误差要更小。
综上,采用跟踪微分器的光电跟踪系统,相对跟踪性能有了明显的改善。
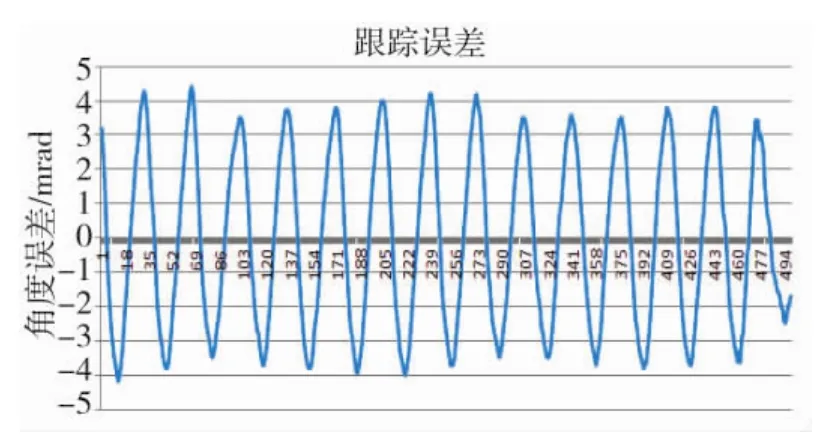
图6 原有系统跟踪误差图
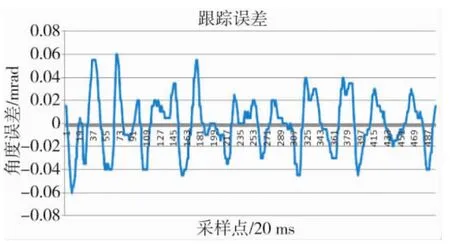
图7 位置滤波后跟踪误差图
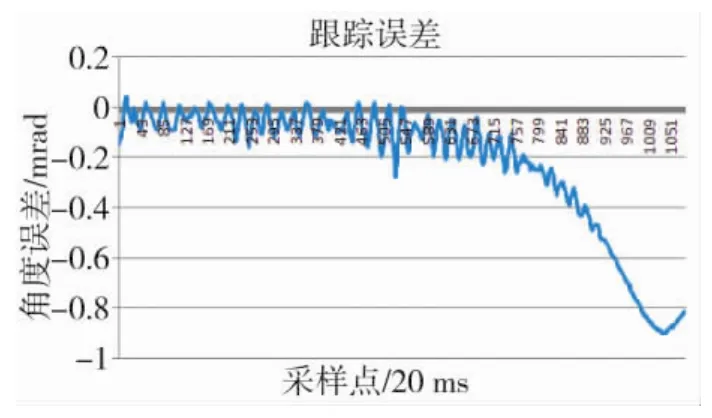
图8 原有系统跟航路时误差图
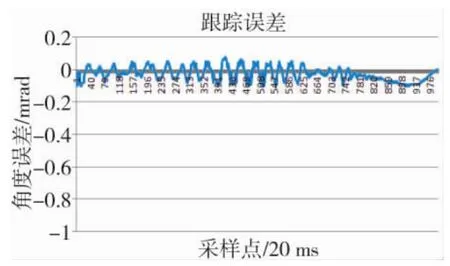
图9 加预测后跟航路时误差图
4 结论
在通过仿真验证了跟踪微分器的滤波和微分性能的基础上,将其应用在现有光电火控系统中,一方面弥补了跟踪误差的滞后;另一方面,对随动指令进行平滑,避免了其对干扰的放大。仿真和试验证明,采用跟踪微分器的光电火控系统,在跟踪精度上有了明显的提升。
