网络雷达对抗系统反隐身优化部署技术*
2019-04-23沙文浩姜秋喜
沙文浩,姜秋喜,周 宇,刘 鑫
(国防科技大学电子对抗学院,合肥 230037)
0 引言
隐身战机是各国实施隐身突防进攻作战的主要力量,它通过改变机体外形、涂覆吸波材料等方式,使雷达散射截面积下降10 dB~30 dB,极大地降低了雷达的有效作用距离,导致常规体制雷达对其的有效探测范围仅有10 km~20 km,甚至更低。在近几十年中东发生的局部战争中,隐身战机凭借着良好的隐身性能,在防空部队尚未发现或对其进行有效跟踪前采取“外科手术式”打击,重创被保护目标,发挥了至关重要的作用。目前国内现有体制雷达很难对隐身目标进行连续跟踪探测并引导火力摧毁,达不到保护重点目标的能力[1]。因此,如何实现对隐身目标的有效跟踪已成为雷达探测领域亟待解决的问题。
网络雷达对抗系统[2](Network Radar Countermeasure Systems,NRCS)通过特定的网络协议与设备将异地分散部署的发射站、接收站和网络中心站,连接成交错复杂的一体化探测网,实现在空域、时域、频域的协同工作。由于其布站相对分散,系统各站可对隐身目标隐身能力较弱的侧向和尾向进行探测,其融合了米波雷达、双(多)基地雷达、组网雷达和无源雷达[3-4]等常规雷达系统的反隐身优点,克服了传统体制雷达探测时存在的目标信息丢失、航迹不连续等问题,提高了系统对隐身目标探测的有效覆盖范围,具有较强的反隐身能力。
目前国内在反隐身优化部署问题上研究较少,现有研究主要以单基地雷达和双基地雷达部署优化为主,采取空域和频域反隐身两种方式,通过增加雷达部署数量实现对任务空域的饱和式覆盖,进而完成对隐身目标的实时跟踪探测。然而,在实际作战运用中,战场雷达资源宝贵,装备使用费用高昂,故应充分考虑最优化部署方式及布站数量,以实现最大的作战效益。崔玉娟等[5]针对单基地雷达组网的原则,提出了基于改进蛙跳算法的优化部署方法,能较好地应用于单雷达组网优化;王春阳等[6]在将速度变异方法引入粒子群算法,实现了多基地雷达的最优化部署,但无法适用于对隐身飞机的探测。
1 反隐身优化部署算法建模
NRCS由若干发射站、接收站、1个网络中心站以及1套网络通讯设备组成,可工作在有源模式、无源模式以及有源无源一体化模式,如图1所示。
1.1 模型假设
在探测隐身目标时,外界因素的影响不容忽视。为便于研究,本文算法仅考虑一般情况,前提条件假设如下:

图1 网络雷达对抗系统组成
1)假设NRCS各发射站具有相同发射功率和工作频率,接收站能接收到来自多个发射站的回波信号,并将获取到的数据信息通过网络进行实时共享。由文献[2]可知,网络中心站在处理、接收各站数据前,根据有源探测和无源侦察信息完成数据融合预处理,即实现空域、频域和时域的同步工作。那么,系统某一收发检测单元的检测方程可表示为:


式中,H0/1是表征目标信号是否存在的判决准则,sm表示第m个发射站的发射信号,cm表示杂波信号,n(t)表示噪声信号;tm,n表示第 m 个发射站发射信号或杂波经目标反射至第n个接收站接收的延时。αm,n(σ)是目标散射复增益,表征各节点雷达方程、RCS分布以及相移参数,可表示为

式(3)中,Rm,n表示电磁波从发射到接收的传播距离,即;
2)为避免因发射站与接收站距离过近造成相互干扰,同时满足各接收站独立采样。本文假设系统各节点部署满足文献[8]给出的空间分集条件,所获得的独立角度采样提供了对目标RCS的空间分集增益;
3)假设隐身目标处于低空飞行状态,探测区域为一个二维平面,即隐身目标在垂直方向的投影;
4)目标函数评价指标为一般探测区域和重点探测区域相对于整个任务区域的覆盖率加权。
1.2 反隐身探测模型
1.2.1 单基地-双基地等效模型
目标RCS是衡量其隐身性能的重要指标,一般情况下,双基地RCSσb与单基地RCSσm存在较大差异,为方便研究,文献[9]中给出了两者的等效原理。假设波长为的双基地RCSσb可以通过在波长的双基地角平分线上观察的单基地RCSσm近似相等,即“单基地 - 双基地等效原理”[9]。

图2 单基地—双基地等效模型
图2中,坐标系的原点为隐身目标的几何中心,T、R分别表示发射站和接收站,Sinc和Stg为发射信号和经目标散射后的回波信号流,βb为双基地角,δβ为双基地角平分线与目标正前方的夹角,即单基地-双基地等效角。
1.2.2 RCS简化模型
由于目标的电磁场衍射问题相当复杂,对RCS的精确推导极为困难,且随着目标的姿态和位置变化,RCS也在实时改变,故无法对其进行准确计算。考虑到从隐身目标不同角度进行照射时,目标RCS存在较大的起伏和差异,但处于一定角度范围内的RCS变化不大,且在一固定的范围内上下波动。故本文基于文献[10-11]给出的F-117隐身飞机缩比模型RCS测试结果,将方位0~180°分成6个区域,取每个范围的RCS平均值σ作为代表值,引入了隐身目标RCS简化模型。图3所示为4种典型隐身飞机在缩比模型为1:15,全尺寸频点约为1 GHz的方位向RCS测试结果,其中0°对应机头方向,测试角度间隔为0.25°,表1以F-117为例,列出了不同角度范围的RCS变化情况。
通过图3、表1的测试结果可以看出,从隐身目标不同角度进行照射时,目标RCS存在较大的起伏和差异,但处于一定角度范围内的RCS变化不大,且在一固定的范围内上下波动。因此,使用表1中各划分区域内RCS的平均值进行等效的方法是可行的。
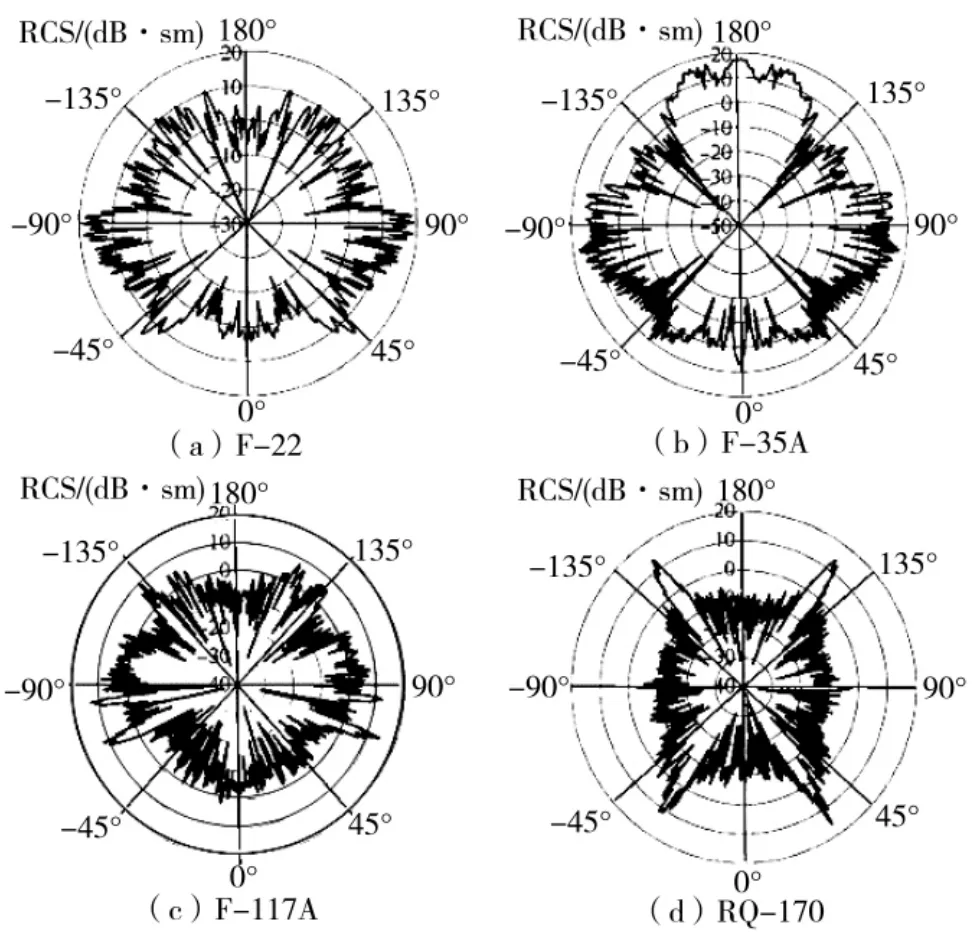
图3 典型隐身飞机的方位向RCS分布图

表1 F-117隐身效果对照表
1.3 网络雷达对抗系统有效覆盖范围计算
由于受各种环境因素影响,隐身目标在飞行过程中,其RCS值随着目标位置和姿态的变化实时改变,故系统对隐身目标的有效探测范围也处于动态变化中。
一般情况下,当虚警概率为10-6时,检测概率达到90%为可靠检测。故在进行覆盖范围计算时,将NRCS有效覆盖范围设定为各收发节点检测概率为90%时的覆盖范围叠加。若用Sij表示第i部发射站和第j部接收站构成的双基地检测节点的有效覆盖范围,则系统有效覆盖范围可表示为:

为方便计算,本文引入面积分割法,将任务区域分割成L×L的方格,每一方格代表一个检测区域。根据双基地雷达检测方程,若两方格中心距离发射、接收站乘积小于可靠检测所需距离积,则认为该区域被可靠检测覆盖;反之,则认为该区域不在此收发单元检测范围内,认为无法可靠检测。面积分割法示意图如图4所示。

图4 有效覆盖范围面积分割示意图
图4中阴影部分为NRCS收发单元的等效覆盖面积,可通过增加网格密度提高计算精度。
2 反隐身优化部署算法设计与实现
2.1 网络雷达对抗系统探测区域划分
在防空作战中,网络雷达对抗系统反隐身突防可大致分为3个阶段,每一阶段对应一个探测区域,分别为警戒区域、一般探测区域和重点探测区域[2,12],区域划分示意图如图5所示。

图5 网络雷达对抗系统任务区域划分
2.1.1 远程预警阶段(警戒区域)
NRCS在进行部署时首先应针对目标在突防行动中是否开机及作战状态等特点,应用有源探测、无源侦察以及一体化探测方式对目标区域进行预警探测。当发现敌隐身目标时,可根据其突防方向调整我方主要作战方向和部署策略,重点加强对主要作战方向的侦察探测。本文将警戒区域设定为距离被保护目标100 km~150 km的区域,限于篇幅原因,在此不对该区域进行重点研究。
2.1.2 空中拦截和引导打击阶段(一般探测区域)
当判明目标属性后,NRCS将其位置、速度、航向等信息提供给航空部队,立即引导我方战机进行空中拦截;若拦截失败导致隐身目标已飞进我方防御区域时,NRCS需要保持对目标连续观察和探测,引导防空力量进行火力打击,消灭来袭目标。本文将一般探测区域设定为距离被保护目标50 km~100 km的区域,为实现连续跟踪探测,该区域雷达的覆盖率应不小于70%。
2.1.3 末端防御阶段(重点探测区域)
当NRCS未成功进行拦截和引导打击,导致我方被保护目标暴露在隐身飞机火力打击范围内时,系统需继续保持对目标进行连续跟踪,并时刻观察目标辐射源动态,发现机载火控雷达开机时立即对其进行大强度、连续干扰,直至目标飞离我被保护目标防御区域。重点探测区域是指隐身飞机对被保护目标威胁较大的区域,由于隐身目标发射的机载近程空—地导弹的射程一般为30 km~50 km,故本文设定重点探测区域为距离被保护目标50 km以内的区域,该区域雷达的覆盖率应不小于95%。
2.2 基于粒子群算法的网络雷达对抗系统节点覆盖算法模型
粒子群算法基于“种群”和“进化”的思想,将NRCS发射站和接收站看成没有体积和质量的粒子,通过在任务区域空间内随机生成以一定速度和方向飞行的离散粒子,寻找收发站探测覆盖率的最优解。在收发站部署优化时,将加权后的一般探测区域与重点探测区域覆盖率作为种群进化时的适应度函数。
在每次迭代更新的过程中,粒子根据个体极值和种群极值大小更新速度和位置:

2.3 网络雷达对抗系统收发节点优化部署
通过前文得到了有效覆盖范围的计算方法后,就要通过优化布站方法对各收发节点进行重新部署。在优化部署时,设重点探测区域面积用Simp表示,一般探测区域面积用Scom表示,那么给出如下概念[13]。
定义:重点探测区域覆盖率F'为重点区域内NRCS探测范围与重点区域总面积的比值,可表示为:

同理可得,一般探测区域覆盖率F''为一般区域内NRCS探测范围与一般区域面积的比值,可表示为:

2.3.1 适应度函数设计
在反隐身探测过程中,NRCS探测的关键是重点探测区域和一般探测区域,所以本文在设定适应度函数时综合考虑几个区域的权重,提出了系统综合覆盖率[14-15]f(X)

2.3.2 优化算法设计与实现
前文给出了粒子群的编码方式,并针对如何选择适应度函数提出覆盖率加权方法。由于标准粒子群算法在搜索过程中粒子更新位置随机性较强,且易得到局部最优解,优化得到的部署结果难以满足NRCS部署要求,故本文对速度和位置更新方程进行了相应改进,使粒子间距达到NRCS部署要求。改进后的粒子群算法流程如图6所示,算法实现的基本步骤如下。
1)设置种群规模和进化次数,确定种群维度N,初始化代表发射站和接收站位置的粒子的位置和速度,得到当前最佳个体最佳位置Pt、种群最佳位置Pg;

图6 改进粒子群算法流程图
2)结合NRCS部署要求,根据区域覆盖率计算公式以及系统加权覆盖率计算方法给出目标函数f(X);
3)根据粒子更新方程对速度和种群进行更新,并限定粒子间隔,以满足NRCS部署要求;
4)将更新后的粒子位置带入式(8)重新计算适应度函数,并与之前结果进行比较,得到当前最优个体,将较大值和对应粒子位置分别赋值给f(X)和Pi;
5)取出当前群体中最优值Pi和Pg进行比较,将较大值保留并重新赋值给Pg;
6)若适应度函数稳定最大值f(X)或者已到达种群规模(最大迭代次数),则判定算法终止,当前粒子位置为最佳布站,并输出Pgbest和f(X);若不满足上述条件,则返回3)进行重新计算。
3 性能仿真实验分析
3.1 仿真环境构建
假设任务区域为以被保护目标为中心,半径为100 km的圆形区域,通过预警探测已明确目标F-117来袭方向和大致飞行航线,其中目标飞行高度为1 000 m,飞行平均速度为0.9 Ma。任务区域为对目标来袭方向90°进行探测覆盖,且根据2.1节所给条件进行区域划分。通过NRCS收发节点合理部署,满足对重点探测区域和一般探测区域的覆盖率要求,实现节点部署的最优化。
根据1.1节模型假设给定条件,设NRCS各收发站在时间、空间和极化上已完成同步,信号发射功率为1.5 kW,工作频段为11 GHz,发射站和接收站增益为40 dB。在进行部署优化时,粒子群算法的参数取值为c1=c2=1.5,惯性权重因子w=0.9,种群进化次数为300次,种群规模为100。
3.2 实验分析
实验1最优化布站数量分析
网络雷达对抗系统进行反隐身部署时,可以通过分布式布站方法实现对隐身目标的空间多角度探测。与此同时,每一部接收站可以收到多个发射站经目标散射的回波信号,使得系统信号流数量成平方级增长,资源利用率大大增加。在进行布站时,考虑到战场资源有限,为避免资源浪费,本文引入粒子群算法对NRCS进行布站优化,实现布站数量的最优化。根据前文给出的覆盖范围和覆盖率计算方法,本文对3发3收、4发4收和5发5收布站方式分别进行了多次仿真实验,结果如图7、表2所示。
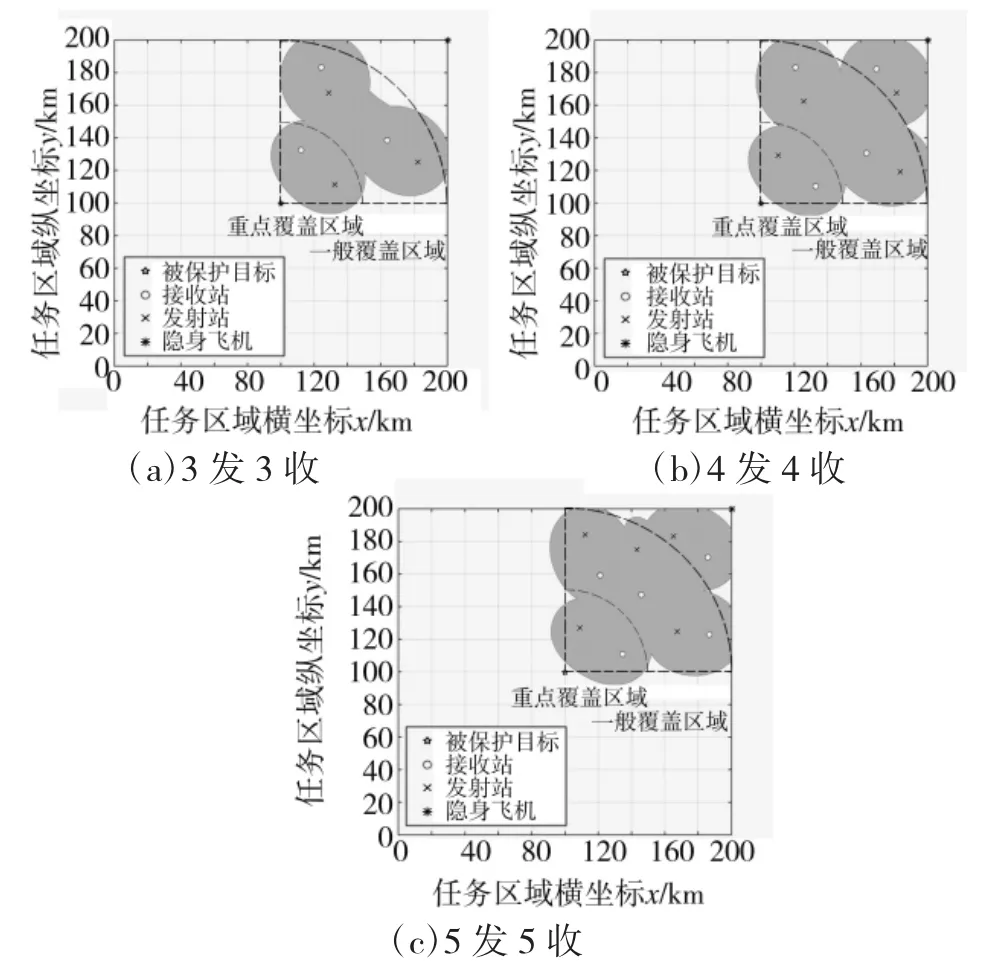
图7 探测覆盖区域

表2 部署数量对覆盖率的影响
由图7和表2相关实验数据分析可得,随着发射站和接收站数量的增加,各区域覆盖率都有一定程度的上升。当发射、接收站部署数量为3时,系统重点区域覆盖率为95.08%,恰好满足部署所需95%的要求,而一般探测覆盖率为61.76%,没有达到2.1节所给区域覆盖率要求,故无法实现可靠探测跟踪;当收发站部署数量为4时,重点区域覆盖率为99.36%,一般区域覆盖率为79.47%,均满足区域覆盖率要求。而当收发站部署数量增加到5时,重点区域、一般区域覆盖率以及加权覆盖率增长幅度较小,影响了装备运用效费比。通过上述分析可得,在本文所给假设条件下,发射站和接收站的数量为4时,可实现最优化部署。
实验2改进的粒子群算法优化部署分析
前文提出针对粒子群算法的NRCS反隐身优化部署方法,在假设模型的基础上,通过对重点探测区域和一般探测区域的覆盖率加权,得到算法优化的适应度函数。假设发射站和接收站数量为4,以式(9)加权覆盖率为目标函数,分别采用SPSO算法和本文算法对NRCS进行Matlab仿真,实验结果如图8所示。

图8 优化算法对比图
由图8仿真可以看出,标准PSO算法稳定性较差,且收敛速度慢,通过200次迭代才能得到最优覆盖率90.61%,且容易陷入局部最优解;本文算法收敛速度较快,通过121次迭代就可实现收敛,且得到的优化覆盖率为92.78%。
为得到更加准确的实验数据,本文将上述两种算法在同一仿真环境下分别进行了1 000次独立仿真实验,将实验结果取均值后进行比较,比较结果如表3所示。

表3 算法性能对比表
实验结果表明,使用标准PSO算法和本文算法得到的平均加权覆盖率分别为90.72%和92.64%。与此同时,标准PSO算法收敛速度较慢,且结果不稳定,容易陷入局部最优解;而本文算法可以实现较快速度的收敛,平均通过136次迭代运算可得到全局最优解,且加权覆盖率平均高出SPSO约2%。考虑到战场环境中时效性至关重要,故与标准PSO算法相比,本文算法具有一定的优势。
由此可见,本文提出网络雷达对抗系统优化部署技术,可使用相对较少的部署资源完成规定的跟踪探测任务,而且通过对目标函数和算法的改进,还可实现比经典算法更优的覆盖率、收敛速度。
4 结论
针对传统雷达反隐身检测存在的角度信息丢失、装备资源利用率不高等问题,本文提出了一种网络雷达对抗系统反隐身优化部署技术。同时,该技术与改进的粒子群算法相结合,并在此基础上将任务区域进行划分和覆盖率加权,通过多次仿真实验得到了所给背景条件下的最优化布站数量。最后,仿真结果表明,与标准粒子群算法相比,本文算法收敛更快,得到的加权覆盖率更高,具有一定实用价值。但本文研究主要以静态任务为前提,下一步将继续研究基于动态任务规划的网络雷达对抗系统反隐身优化部署问题。
