体积阵束控方法特性研究
2019-04-18陈俊宽马启明
陈俊宽 马启明
(第七一五研究所,杭州,310023)
主被动拖曳声呐中的发射阵一般采用单拖体形式,如果采取垂直方向多个拖体组成发射阵拖曳使用,可以提高发射声源级,但同时也存在一些新的问题。作为接收阵需保持拖曳状态才能正常工作,声呐平台速度不能过低。而在较高航速下,受水流等外力作用的影响,发射阵会产生拖曳倾角,导致各阵元发射的信号在不同方位角上的叠加有差异,形成指向性,部分方位角上声源级过低无法实现远距离探测,减小了声呐系统的探测覆盖范围。
束控发射技术通过补偿各阵元间的发射时延以实现体积阵探测覆盖范围的最大化。本文选取倾角 3°、5°、8°和 12°,在典型的浅海与深海环境下仿真验证束控发射的效果,对体积发射阵的使用具有参考意义。
1 优质因数分析
优质因数 (Figure of Merit,FOM)给定声呐系统允许的最大双程传播损失,可用来判断目标所处区域是否可探测。定义如下[1]:

假设一条由N个间距为d的双阵元构成的体积阵,区分左阵和右阵。其倾斜角为β,每个阵元发射的信号均为u(t),脉宽为T。以发射阵水平投影方向为x轴,方位角为 0°,深度最浅的阵元作为 1#阵元,如图1所示。则n#阵元发出的信号到达远场某点处与1# 阵元信号的时差为:

式中,c为声速,θ为远场某点的方位角。则该处接收到的信号为:

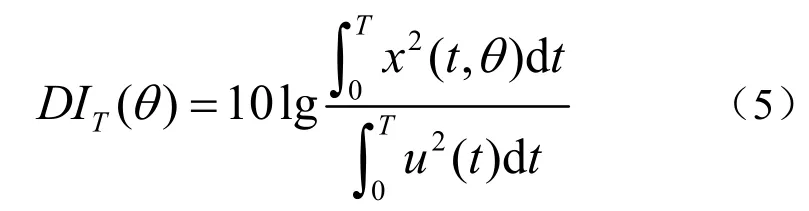
发射器发射指向性DIT的定义[2]为,

式中,ID为指向性发射器声轴方向上的声强度,IND为无指向性发射器辐射声强度。声强与声压幅值的平方成正比[3],得到:
发射声源级为:

由此得到发射阵倾斜状态下的发射声源级SL。

图1 发射阵倾斜示意图
结合式(1)、(6)得到发射阵拖曳倾角β分别为 3°、5°、8°和12°时的FOM,如图2所示。

图2 不同倾角时的优质因数
从图2可以看出,随着倾斜角的增大,FOM随方位角变化的起伏加剧,盲区明显增多,而方位角±90°时因不存在波程差,FOM始终保持较大。
2 体积发射阵声场仿真
传播损失分为去程传播损失TL1和返程传播损失TL2。由于各阵元所处深度不同,去程传播损失不能简单将全阵视为点声源,因此以各阵元各自传播损失TL'n模拟出全程传播损失TL1。返程计算目标处到拖曳接收阵处的传播损失,如图3所示。

图3 传播损失示意图
根据体积阵的布阵特点,结合平面几何结构中的线源模型、海区的水文条件,利用简正波模型对发射阵声场进行仿真。
2.1 浅海弱负梯度条件
浅海情况下声波传播至远处时,受海底海面多次反射,导致前向传播的声波能量损失,尤其是会漏入海底或为海底介质所吸收。因此,只有小掠射角的声线才会对远距离声场起重要作用。声速的垂直分布会影响声线轨迹,进而影响声线接触海底的次数及海底反射损失。仿真条件:体积阵倾斜角β为 0°,海深300 m,声速1 515~1 530 m/s,斜率g=-0.05,海水密度ρ=1.6 g/cm3,海底声速c0=1 579.9 m/s,海底衰减系数α=0.2。该条件下声速梯度以及声场仿真结果如图4所示。

图4 浅海弱负梯度声速梯度及TL1+TL2
当发射阵处于倾斜状态时,由于拖曳倾角导致不同方位角上各阵元信号波形叠加不同,传播损失在不同方位角上会略有差异,而±90°方向上由于不存在传播时延,不论拖曳倾角的大小,其双程传播损失始终如图4所示。
2.2 深海夏季水文条件
深海声速剖面有一个重要特点是存在一个声速极小值,所在深度为声道轴,其上下方分别为声速负梯度和声速正梯度。由斯涅尔定律可知声线始终弯向声速极小值方向。因此当声源位于海面附近,或深海内部接近海底(应在深海声道范围内)时,会形成声强很高的焦散线和出现在海面附近的会聚区。实际的水声探测中,声源和接收器通常位于海表面附近,通常利用深海声道的会聚区来实现远程探测[4]。仿真条件:体积阵倾斜角β为0°,海深2 000 m,声道轴深度位于1 000 m,表面层与季节跃变层位于0~100 m,为负梯度,声速1 530~ 1 540 m/s;主跃层100~1 000 m,负梯度,声速1 480.5~1 530 m/s;深海等温层位于1 000~2 000 m,正梯度,声速为1 482.5~1 498.5 m/s;海水密度ρ=1.469 g/cm3,海底声速c0=1 546 m/s,海底衰减系数为α=0.13@500 Hz。此条件下声速梯度以及传播损失的仿真结果如图5所示。
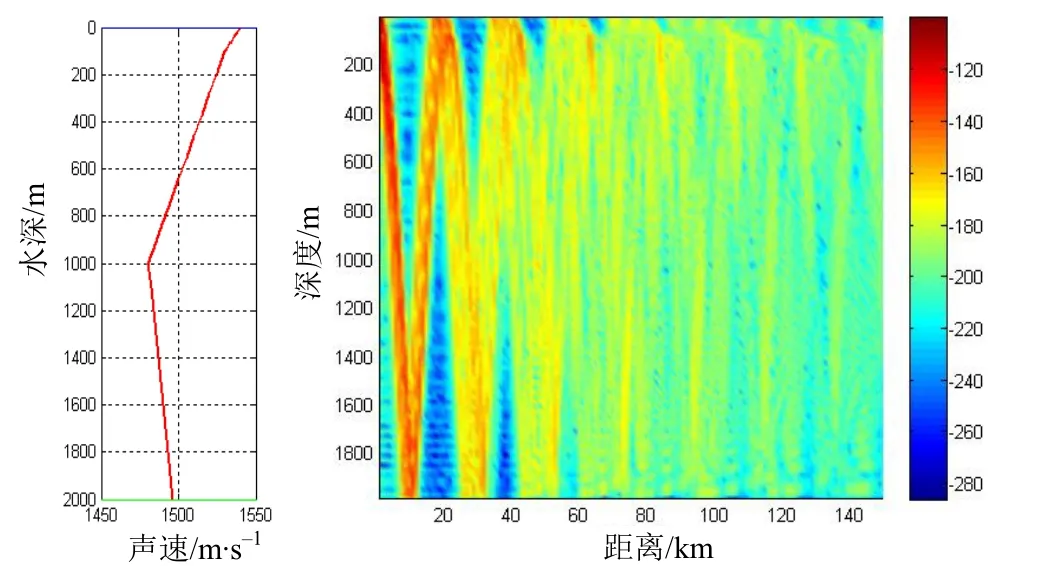
图5 深海夏季声速梯度及TL1+TL2
与浅海情况下一样,当倾斜角不为0°时传播损失会随方位角不同而有差异,方位角为±90°时双程传播损失始终如图5所示。
3 束控发射仿真分析
考虑覆盖范围为发射阵所在位置的方圆 150 km,判定标准为该处是否满足

若满足,判断为可探测区域;否则判断为不可探测区域。
3.1 未束控时的探测性能分析
对发射阵存在倾角并且未束控的自然状态下的探测覆盖范围进行仿真,并以此作为束控后探测性能的对比参照,以评价束控发射的效果。
3.1.1 浅海弱负梯度条件
当倾斜角为5°时,探测距离分别为30、70、110和150 km,对应的发射阵可探测范围如图6所示。为表现直观,优质因数小于传播损失的区域均已置零。可见当距离较近时探测覆盖范围较大,方位角为±90°附近的区域富余能量较多,尤其是阵中心深度所在的100 m海深处。距阵较远处基本只能探测到方位角为±90°附近的区域。
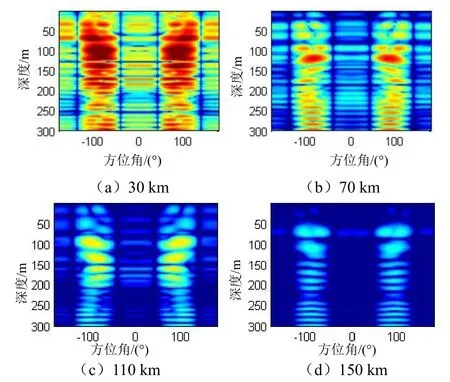
图6 浅海弱负梯度各距离处探测情况
3.1.2 深海夏季水文条件
同样是5°倾斜角的状态,在深海夏季水文条件下,探测距离为30、70、110、150 km,发射阵可探测范围如图7所示。图中小掠射角声线被限制在声道内传播。30 km处深度大于600 m处探测效果较好,深度小于600 m处于盲区;而70 km处探测性能较好的区域则在500~1 000 m处,可见深海情况下探测比较依赖于声线的走向,同深度的可探测区域具有不连续性。考虑到通常情况下目标深度不会过深,目前仅统计深度小于600 m处的可探测的覆盖范围。

图7 深海夏季各距离处探测情况
3.2 束控效果验证
束控发射可通过补偿各阵元之间的发射时延实现声场的重新分布,期望通过束控发射得到最佳的声场分布,以实现最大化发射阵探测覆盖范围的目的。具体过程如下,对左阵编号为n的阵元补偿时延τBn,对右阵编号为n的阵元补偿时延–τBn。其中

各倾斜角状态下体积阵的全方位角的发射声压级的平均值随τB的变化趋势如图8所示。
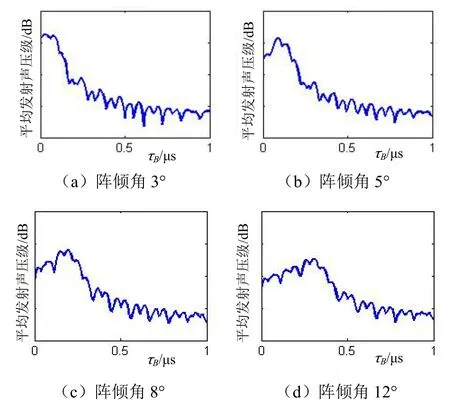
图8 平均声压级变化趋势
由图可得,随时延τB增加,平均发射声源级均经历了一个先提升再降低的过程,为确保发射声源级处于较高水平,因此定义

设未束控状态下可探测的总体积为V,束控后的可探测体积为VτB。以

为判断束控效果的准则,寻求最优的束控时延。
3.2.1 浅海弱负梯度条件
浅海弱负梯度条件下RτB的变化趋势如图9所示。图中的虚线表示在该倾斜角下τBT的值,均满足τBT之前RτB先增大后减小,在τBT之后RτB继续衰减。因此可取式(9)作为寻求最佳束控时延的范围。取RτB的极值对应的τB作为最佳束控时延,由图可见,当倾斜角达到 3°、5°、8°和 12°时的最佳束控时延分别为0.04、0.09、0.15、0.26 μs,对应的改善率分别为1.039、1.140、1.203和1.261,也可知在倾斜角较大的情况下束控效果最佳,此处最佳仅指相同海况下与束控前相比,由于随着拖曳倾角增大,在各方位角上发射声源级起伏加剧、总体发射声压级降低,总覆盖体积仍然是随着倾斜角的增大而呈下降趋势。

图9 各倾斜角下RτB随τB变化趋势
3.2.2 深海夏季水文条件
深海夏季水文条件下RτB的变化趋势如图10所示。由图可知深海情况下改善率RτB的变化趋势与浅海近似,倾斜角为 3°、5°、8°和 12°时最佳的τB分别为 0.03、0.08、0.19、0.31 μs,对应RτB分别为1.059、1.253、1.393 和 1.513。

图10 各倾斜角下RτB随τB变化趋势
3.2.3 束控后探测情况分析
分别取阵倾斜角为 5°时的最佳束控时延仿真,结果如图11~12。由图11~12和图6~7的对比可以看出,束控后发射能量在各方位角相对比较均匀,而不是自然状态下集中于±90°附近的区域。在没有目标先验条件的情况下,目标出现在各处的概率是相等的,因此将探测覆盖体积最大化就能将探测到目标的概率最大化。

图11 浅海弱负梯度τB=0.09μs
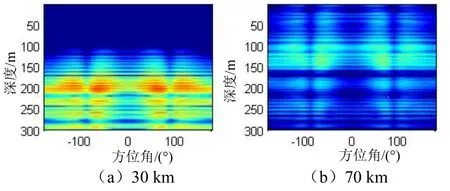

图12 深海夏季τB=0.08μs
4 总结
通过上述仿真实验可知,束控发射对于不同方位角上的发射声压级以及声场传播损失都有影响,但对于传播损失的影响相对较小,不足以改变可探测区域的深度。由深海夏季的仿真结果可以看出,通过束控发射基本无法改变会聚区位置。但是束控发射可以在很大程度上改变不同方位角上的探测情况。
发射阵的实际使用过程中,浅海弱负梯度以及深海夏季水文条件下,阵倾角不大时的最佳束控方式差异不明显,主要考虑选取适当时延使得各方位角上发射声压级较大且较为稳定;在拖曳倾角较大的情况下,需要结合当前水文条件,兼顾不同方位角上的发射声压级以及传播损失,以得到适合当前环境的束控方式。在仿真结果中浅海弱负梯度水文条件需较小时延进行束控;而深海夏季水文条件下所需束控时延较大。
当工作海区的水文条件不明确时,可先估计发射阵的拖曳倾角大小,确定适当的束控时延优先,确保各方位角上发射声压级较大且较为平稳,尽量降低全阵水平指向性,以得到尽可能大的探测覆盖体积,提升发射阵的工作性能。