一类分数阶神经网络的自适应H∞同步
2019-04-10袁晓琳莫立坡
袁晓琳,莫立坡
(北京工商大学 理学院,北京 100048)
由于分数阶算子具有许多良好的性质,如记忆性和遗传性,近年来这一领域吸引了众多学者的研究。如:Zhang等[1]为分数阶系统提出了许多简化的LMI稳定性条件,Li等[2]研究了分数阶非线性动态系统的Mittag-Leffler稳定性等。
人工神经网络的概念由McCulloch等首次提出[3]。随后Hopfield提出了一个新的名为Hopfield神经网络的循环神经网络[4],这为解决优化问题和数值计算问题做了很大的贡献。目前,神经网络被广泛应用于许多的领域,例如,模型预测[5]、自动化控制[6]以及优化[7]。但大部分结果都假设系统的动态模型是整数阶的。然而,在很多实际应用中,分数阶微分方程能够更好的描述实际系统。目前,有许多关于分数阶神经网络同步问题的研究结果,如自适应同步[8]、全局同步[9-10]、有限时间同步[11-12]、 α 同步[13]等。此外,当系统中存在未知参数时,文献[14]研究了此类分数阶神经网络的自适应同步问题。事实上,除系统参数外,系统的输入也可能是未知的,并且系统不可避免地受外部干扰。然而,据我们所知,目前很少有关于这方面的研究结果。
受文献[15-16]的启发,本文用 H∞控制的方法来研究了一类分数阶神经网络的 H∞同步问题。提出了一个使闭环系统实现自适应同步和自适应H∞同步的自适应控制协议。并且通过利用鲁棒控制方法和Gronwall-Bellman不等式完成了闭环系统的收敛性分析及 H∞性能分析。与文献[17]相比,它所考虑的是无外界干扰的整数阶神经网络模型,而我们在这篇论文中考虑了分数阶的动态模型,同时考虑了未知外部干扰的影响。与文献[14]相比较,它模型中的外部输入是已知的,而在此篇论文中考虑了未知的外部输入。众所周知,H∞性 能主要是用于刻画系统的输入输出间关系的一种性能指标,文献[14]并没有研究系统的H∞性能,在本文中我们做了相应的研究。
1 分数阶算子的基础理论知识
本部分主要介绍分数阶算子的定义和相关引理,这对于我们以后的分析是非常重要的。
定义1[18]函数 f的Riemann-Liouville型 α阶分数阶积分定义为

式中: t ≥ t0;0 < α < 1;Γ(·)表示Gamma函数。
定义2[18]函数 f ∈Cn([t0,+∞),R)的Caputo型α阶分数阶微分定义为

式中: t ≥t0;n 是 一个正整数使得n-1<α<n.特别地,当 0 <α<1时,

引理1[19]设函数 g (t)在 t ∈[t0,b]上是连续可微的,则对任意的常数及 t ∈[t0,b]有

其中 0 <α<1。
引理2[20]令 n =[α]+1, 当 α ∉N 时 ,或令n=α当 α ∈N 时 。如果 y (t)∈Cn[t0,b],则
特 别 地 , 当 0 <α<1 及 y (t)∈C1[t0,b] 时 , 有)=y(t)-y(t0)。
引理3[14]假设 x (t),y(t)∈C1[t0,b], 如果对∀t∈[t0,b]有 x (t)≤y(t),则t0x(t)≤t0y(t)。
引理4[21](Gronwall-Bellman 不等式)若存在x(t)满 足 x (t)≤a(τ)x(τ)dτ+b(t), 其中 a (t)和 b (t)是两个已知的实函数,则

如果 b (t)是可微的,从而

如果 b (t)是一个常数,从而

引理5[22-23]Riemann-Liouville型分数阶非线性微分方程 Dαxi(t)=fi(x(t)),i=1,2,···,N,可以被表示成
2 研究问题的系统模型描述

考虑如下分数阶神经网络作为驱动系统式中: 0 < α < 1;i=1,2,···,n,n表示神经元的个数;xi(t)∈R 是 第i个 神经元在t时 刻的状态;ci是一个正的常数,表示第i个神经元在无任何连接情况下恢复到静息状态的速率; aij表 示第 j个神 经 元与第i个神经元之间的连接权重,并且满足 aij≤ µ,其中µ是一个正常数;Ii表示是外部输入,它是不可以被获得的; fj(·)是 第 j个神经元的激励函数,它满足全局的李普希兹条件,即存在 Lj>0使得

式中: u ,v ∈ R;j=1,2,···,n。
考虑如下响应系统:

式中: yi(t)∈R是响应状态; aij(t)表示 aij(t)的参数估计值; ui(t)是 控制输入, wi(t)是未知的外部干扰,它们属于:

其中 β >0是一个正常数。
定义3[18]称驱动系统(式(1))与响应系统(式(3))是全局渐近同步的,如果存在控制器ui(t),i=1,2,···,n使得

3 一致性收敛分析
3.1 自适应同步
考虑闭环系统的零输入响应,即研究当外部干扰不存在时系统式(1)和式(3)的同步问题。为此,设计如下自适应控制律:
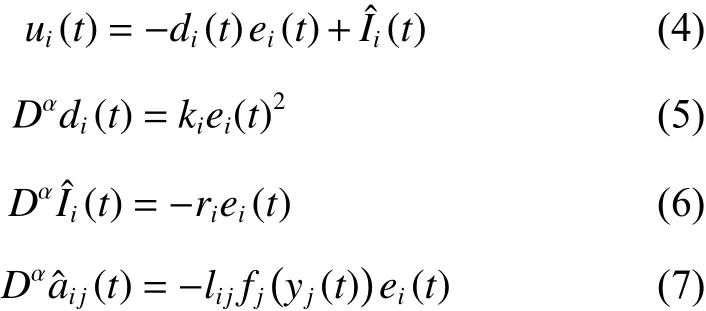
式中: ei(t)=yi(t)-xi(t),i=1,2,···,n定义为状态误差 ; Ii(t)∈R定 义 为 未 知 外 部 输 入 的 估 计 值 ;di(t)∈ R 是 时变的控制强度; ki、ri和 lij是正常数,它们的取值待定。
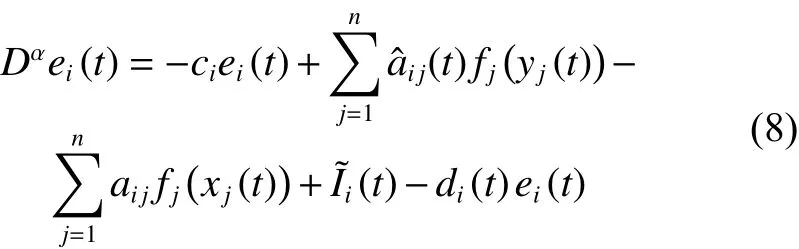
利用自适应控制律式(4)~(7),动态误差闭环系统可以写成如下形式:
注1 我们通常所说的控制律(控制协议)是指一系列信息传输规则,当驱动系统采取该控制律时,可以与响应系统实现同步。与传统的控制律形成对比,本文设计了新的自适应控制律(4)~(7),且控制律中 di(t)、 Ii(t)、 aij(t)的动态方程是分数阶的,因而更具有一般性。除此之外,利用该控制律还可以对未知参数 aij(t)进行估计。
定理1对任给的正常数 ki,ri,lij,i,j=1,2···,n。如果外部干扰不存在,即 wi(t)=0,i=1,2,···,n,那么利用自适应控制律(4)和参数估计器(5)~(7),驱动系统(1)和响应系统(3)可以实现全局渐进同步。
证明定义如下类似李雅普诺夫函数:
注意到
其中 µ =sup(aij),εi> 0是一个正常数。
利用引理1,计算系统(9)的 V (t)的 α阶Caputo型导数,有
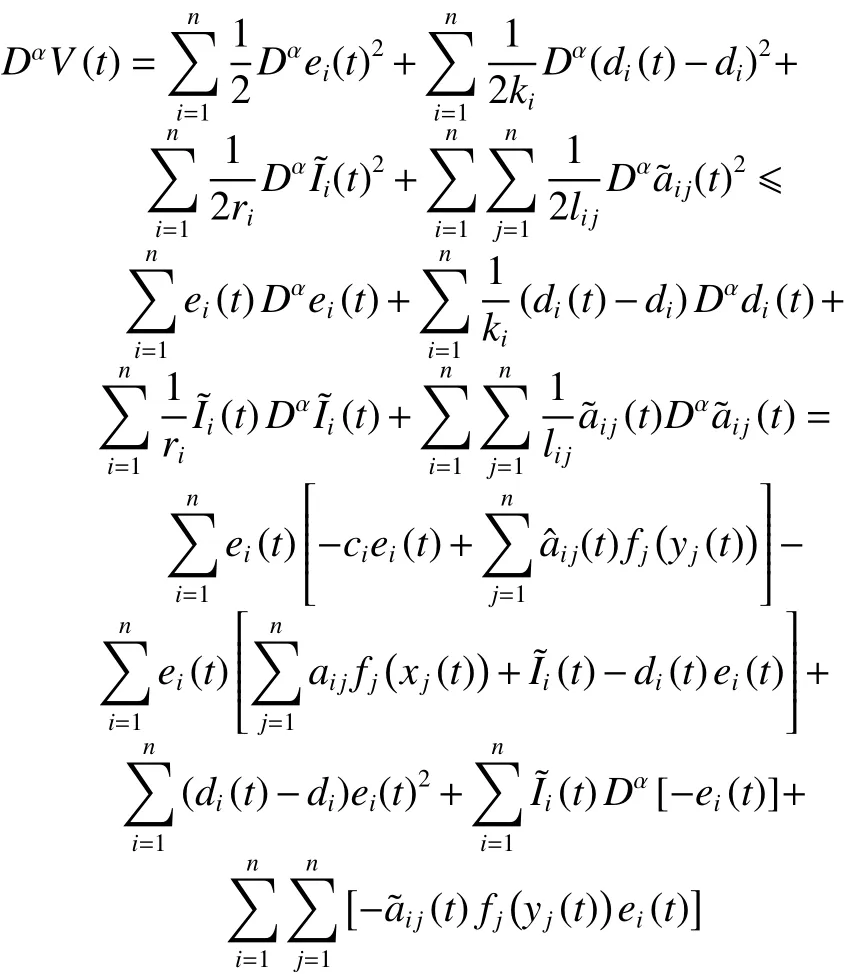
从而
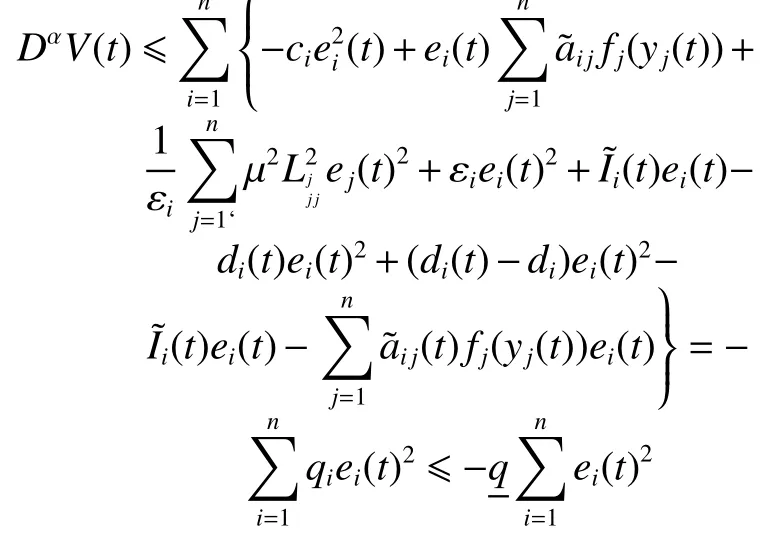
事实上,我们可以通过取足够大的 di来 保证qi>0,
由引理2和3可得


利用引理4,可以得到
综上,利用控制律(4)~(7),响应系统与驱动系统可以实现自适应同步。
注2在定理1中,我们只能保证驱动系统和响应系统可以实现同步。为了对所有的未知参数进行辨识,需要对激励函数 fj(·)添加额外的条件。基于误差系统(8),当两个系统实现同步时,误差系统可以被重写为如下形式:

根据函数线性无关的条件,当 fj(xj(t))线性无关时可以对未知参数进行辨识。
注3 与其他相关文献中设计的控制协议相比,如文献[14],我们所考虑的是带有未知参数和未知外部输入的系统。因此,文献[14]中所考虑的模型是本文的特例。
3.2 自适应 H ∞同步
利用 H∞性能指标来研究外部干扰对系统同步的影响。
定理 2考虑驱动系统(式(1))和响应系统(式(3))。利用控制律式(4)和估计器即式(5)~(7),则对于给定 γ >0 , 误差系统(8)可以满足 H∞性能,即在零初始条件下可以满足 ‖Tzw(s)‖∞< γ。
证明由于在零初始条件下,Caputo型导数与Riemann-Liouville型导数等价,利用引理5,误差系统(8)和估计(5)~(7)可以用以下分布表示:
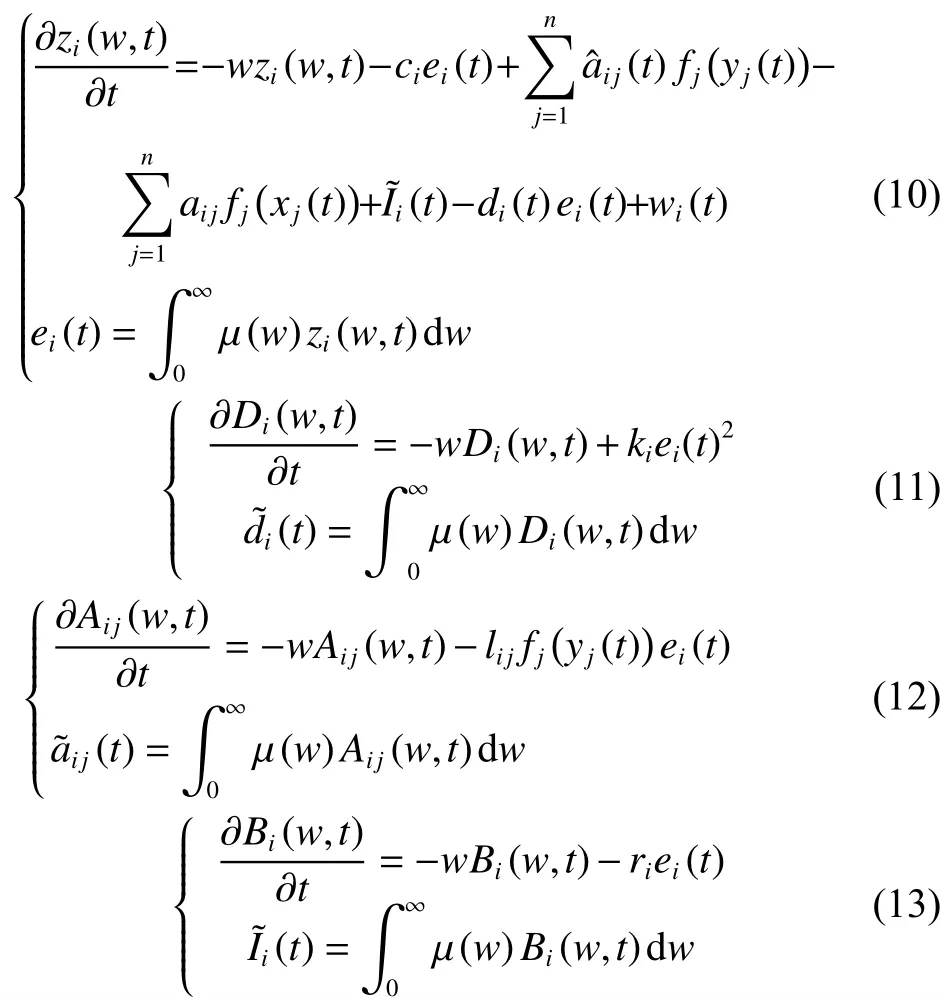
式中: i ,j=1,2,···,n;d˜i(t)=di(t)-di;zi,Aij,Bi,Di,均是无限维的分布式状态变量; µ (w)在引理5中被定义。定义如下类似李雅普诺夫函数:
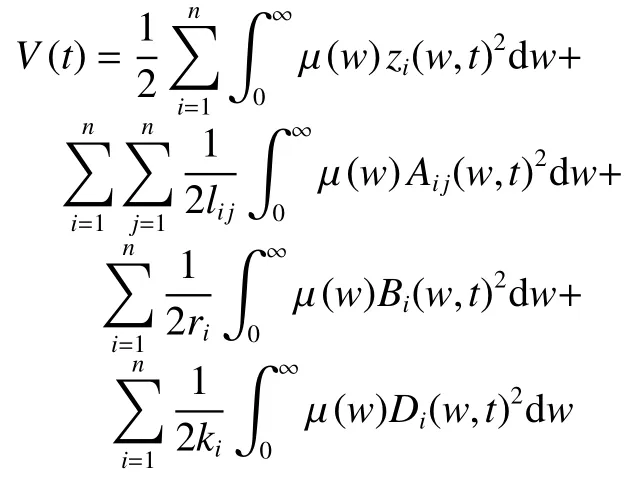
从而 V (t)的导函数为
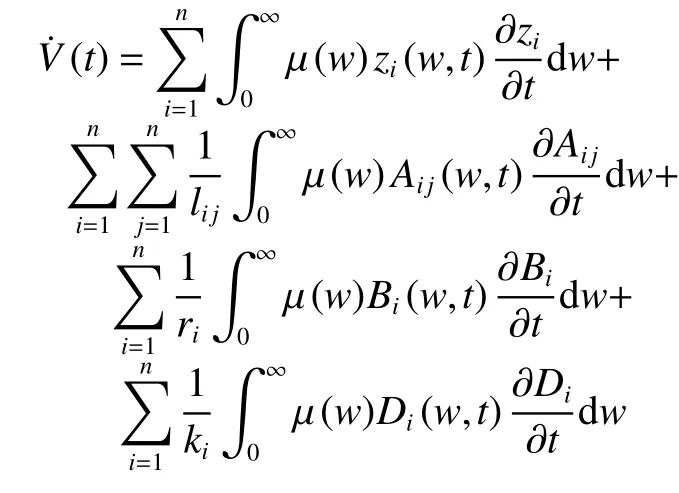
可以通过取足够大的 di值使得

注4目前,关于 H∞控 制问题的研究主要集中在整数阶系统,比如文献[15-16]。本文通过利用分数阶微分方程的分布式表达形式将这些结果推广到了不确定分数阶神经网络系统,提出了一个可以使闭环系统实现 H∞同步的自适应协议。
4 仿真实验
通过给出的仿真实例来验证我们所提出的控制器在实现自适应同步和 H∞同步方面是有效的。此外,我们讨论了相关的参数辨识问题。
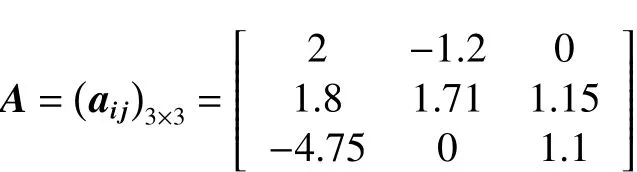
例:对于驱动系统(式(1)),响应系统(式(3))以及控制协议即式(4)~(7),令
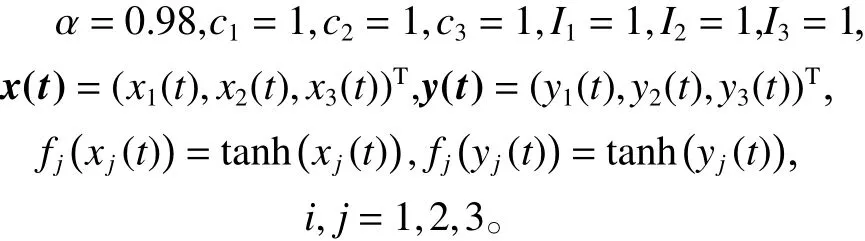
以及
选取初始条件为
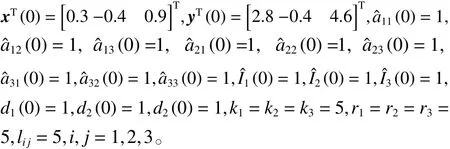
图1为驱动系统(1)和未加控制器的响应系统(3)的状态轨迹图,显然两个系统并没有实现同步。
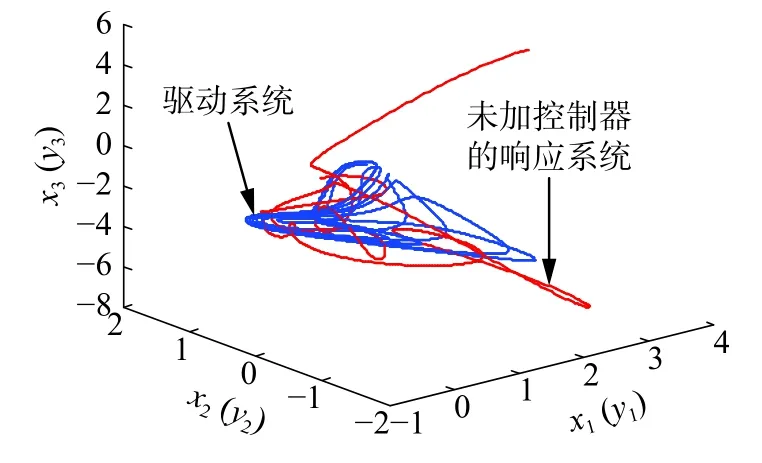
图1 驱动系统(1)与未加控制器的响应系统(3)状态图Fig.1 States of drive system (1) and response system (3)without controller
图2 为驱动系统(1)和加了控制律(4)~(7)的响应系统(3)的状态轨迹图,该图显示利用控制律(4)~(7)这两个系统实现了同步。
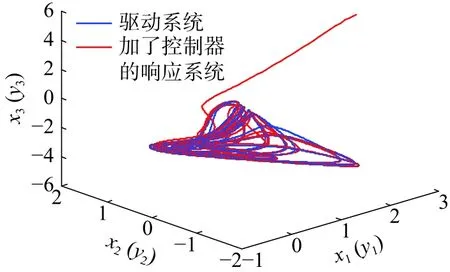
图2 驱动系统(1)与加控制律响应系统(3)状态图Fig.2 States of drive system (1) and response system (3)with controller
图3 为控制强度,当时间趋于无穷时它们都收敛到一个确定的常数。从图4~6可以看出响应系统中(3)中所有的未知参数可以很好地辨识出来,辨识值为

与权重矩阵 A 中的初始值相一致。这表明所提出的控制器是有效的并且可以精确地辨识所有的未知参数。
若将初始值改变为
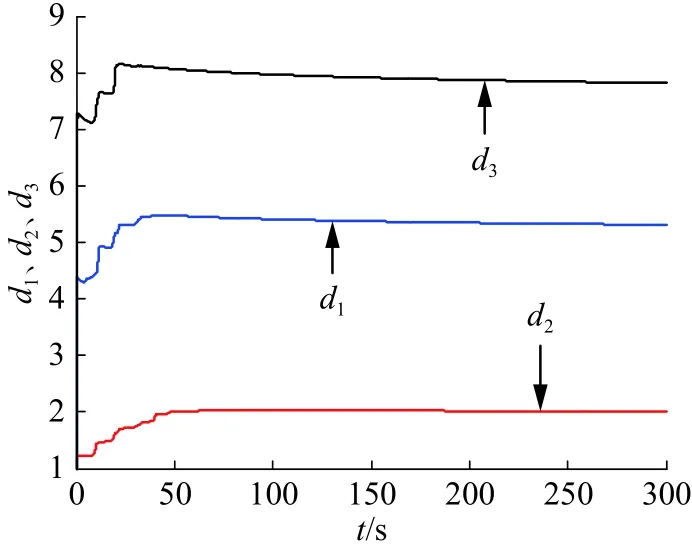
图3 d 1、d2、d3 随 时间t的变化图Fig.3 d 1,d2,d3varies with time
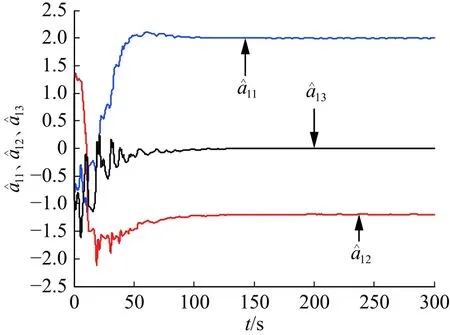
图4 、、的辨识Fig.4 Identification of3
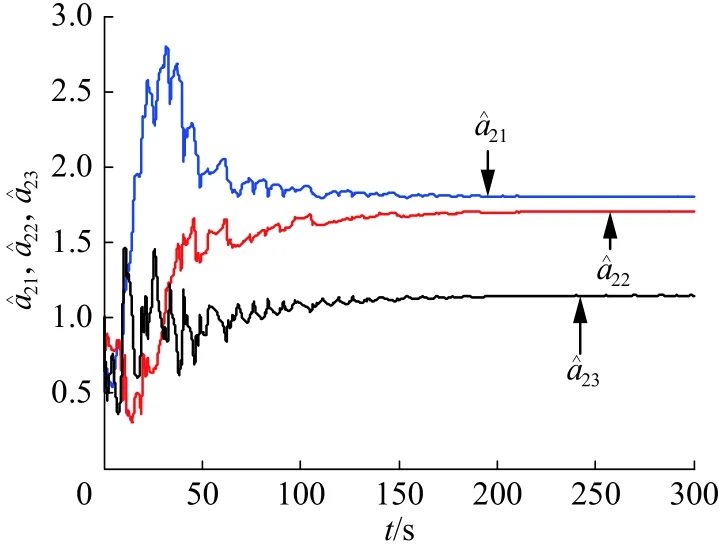
图5 、、的辨识Fig.5 Identification of3
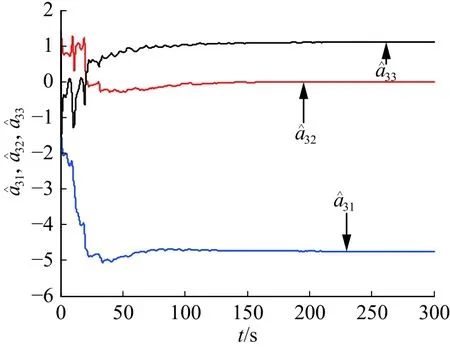
图6 、、的辨识Fig.6 Identification of3
并且添加条件:
式中i = 1,2,3。通过图7可以读出γ=0.466 3。
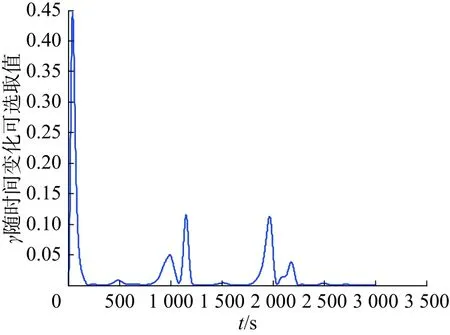
图7 γ随时间变化可选取值图Fig.7 The value of γ varies with time
图8 显示当 t →∞时,有
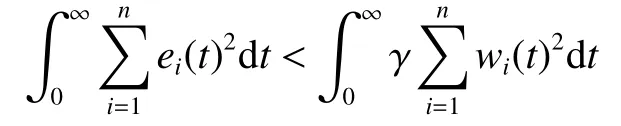
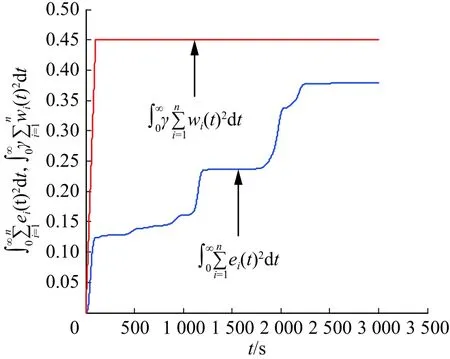
Fig.8 The energy trajectories of and
即满足 H∞同步。
5 结束语
本文针对一类不确定分数阶神经网络系统,本文研究了其自适应 H∞同步与参数辨识问题。注意到,不确定项总是存在于实际的神经网络中,而文中所得研究结果可以很好的解决这一问题,即可以精确地对不确定参数项进行辨识同时具有很强的鲁棒性。因而,本文的研究结果具有很强的实际应用价值,可以广泛的应用于实际神经网络。
然而,本文所考虑的是理想化的网络模型,在实际应用中,时滞总是存在于神经元之间的通讯过程中,并对系统的稳定性产生严重的影响,进而影响对未知参数的辨识精度。注意到,目前还没有关于此方面比较好的研究结果,因此,有必要设计相关的控制协议来抵消时滞对系统稳定性造成的影响。在未来的研究中,我们将进一步针对带有时滞的不确定分数阶神经网络,设计相关的控制协议,从而对系统中的未知参数进行精确地辨识,同时使系统实现同步。
