基于改进蚁群算法的AGV路径研究
2019-04-10何成伟HEChengweiMAOJian
何成伟,茅 健 HE Chengwei,MAO Jian
(上海工程技术大学 机械与汽车工程学院,上海 201620)
0 引言
AGV已是现代物流工厂重要的运输设备,在应对越来越复杂的物流环境中,需要解决物流工程与任务复杂度的增加,AGV智能化的需求也越来越高,实现AGV的自主化也是国家实现2025计划,工业4.0智能制造的重要部分。传统的最优路径规划方式有基于A*算法[1],Dijkstra算法[2],但是都有着计算量大,收敛速度慢,不具备实时性的弊端。近年来,神经网络[7]、蚁群算法[4]和遗传算法[3]也陆续应用到路径规划中。在这些方法中,神经网络因其具有良好的自适应和学习优化能力,但是其泛化能力弱,不具有普适性;遗传算法有着较强的搜索能力,改进遗传算子,引入适用度权重系数[5],可以很好地寻求全局最优解,但是效率低;蚁群算法有着很强的启发性和稳定性,许多学者对蚁群算法有着深入的了解,使用蚁群算法结合Dijkstra算法规划AGV初始路径,引入节点随机选择机制得到最优路径[6],或是通过更改启发函数,算法中引入全局信息,得到全局的最优解[7]。
本文针对单台AGV在复杂物流车间运输过程中如何规划最优路径的问题,研究了基于改进蚁群算法的启发函数和信息素挥发系数,利用引入全局信息,设计避障因子和构造路径光滑参数三个方面进行优化。搜索到保证路径光滑的情况下,得到的最短路径。仿真结果表明,本算法具有较好的最优路径距离,且具有更好的避障能力,耗时较小,更适合于复杂的工厂环境。
1 构造AGV作业环境
在AGV路径规划中,首先需要建立AGV运输环境模型。常有可视图法,栅格法和无向网络图。根据实际物流车间运输的情况,本文应用MAKLINK无向网络图,按如下规则构造AGV可移动路径。
(1)将移动的AGV看作是质点。
(2)将障碍物向各个方向膨胀,将其抽象为凸多边形。即使是规划的AGV沿着凸多边形边缘行走也不会与真实的障碍产生碰撞。
(3)每条自由连接线不能穿过障碍物。
(4)连接线的端点可以是障碍物的凸多边形的顶点,或者是自由空间的边界上的点。
(5)取每条连接线上的中点,作为AGV可行驶的节点。

图1 构造MALINK自由路径
图1中S—AGV行驶起点;T—AGV行驶终点;图中细线封闭凸多边形为障碍物。将节点相互两两相连,作为本文AGV路径规划的无向网络图。
2 改进蚁群算法
根据传统蚁群算法,第k只蚂蚁从节点i出发到达下一个节点j转移概率为:

式中:allow为节点i出发到其余所有的节点j的集合;为蚂蚁在路径i到j节点上留下的信息素浓度;ηij(t)为节点i到节点j的转移期望值,是节点j的启发函数;α为信息素浓度对转移概率的影响因子;β节点i到节点j的期望值对转移概率的影响因子。
启发函数ηij(t)的计算公式如下:

式中:dij为节点i与节点j之间的距离值。
若节点i和节点j的距离越短,启发函数的值就越大,节点i到节点j的转移概率也越大。
从上述分析来看,蚁群算法只考虑了相邻节点与节点的距离,没有考虑节点之间是否存在障碍。
2.1 引入避障因子和全局信息
当两个直线段有交点时,即认为节点i和节点j之间有障碍物G存在。即当xg2>xa>xg1,xi>xa>xj时,节点i和节点j存在障碍物。
计算直线方程lij各参数,计算得到直线lij,lg。
A点(xa,ya)是上述两直线产生的交点,即可得:
各坐标点的大小关系,构造避障函数 γij(t),γij(t)∈[0,1 ]。构造 γij(t)的计算公式如下:


根据式(3) 可见,当满足节点i和节点j之间有障碍物时,的值为负;当节点i和节点j之间无障碍物时,γij(t)的值为正。所以,当存在障碍物时,可得启发函数)的值比原来大幅减小,并通过启发因子β放大,其转移概率大幅下降,此时算法将选择邻近其他无障碍节点作为下一个路径点。
式(4)中,djT为下一个节点到终点T的直线距离。ωj为引入的动态全局优化因子,ωj∈ 0,[ ]1 。ωj的计算公式为:

式(5)中,Mcurrent为从起点运动开始计算的已经通过的自由空间中节点数;Mmax为所有自由空间中节点数量。
当算法刚刚开始,通过计算当前的节点数和所有节点数的比值,ωj的值很小,启发函数ηij(t)的值很大,搜索范围内的转移概率将被放大,可以提高算法的准确性;当蚁群算法逐渐搜索到后期,ωj的值逐渐变大,启发函数)逐渐变小,使蚁群算法收敛速度增加。
将式(4)代入式(1)中,得到改进后的蚁群算法转移概率计算公式:
2.2 路径光滑因子

根据传统蚁群算法运算结果,规划的AGV路径存在有突变节点,即AGV在行驶中速度与加速度变化较大,行进方向有较大突变。带来的后果是按照不光滑路线行驶的AGV,时常需要改变较大的行驶角度,致使在转动的过程中AGV损耗更多的电量和时间。由此,在改进蚁群算法转移概率目标函数时,考虑将路径光滑作为一个参数,构造路径光滑因子。
选取一条AGV行驶路径,取其中三个连续的路径节点A、B、C。如图2所示,夹角φ为后一时刻AGV行驶线段的延长线与当前路径方向的夹角。
为了使规划的路径近似光滑,即是AGV方向转角较小,所以φ的角度在0~90°之间。构造路径光滑参数λ和路径光滑因子f,其计算公式如下:

图2 路径光滑示意图

如式(7)所示,λ作为路径光滑参数,反应了前后两个时刻的规划路径节点是否满足近似光滑条件,即φ的值不超过0.5π,则λ∈[0,1] 。若前后两个时刻规划路径节点不满足近似光滑,即φ的值超过了0.5π,则λ的值超过1,认为AGV行驶在这一节点不光滑。
式(8)为光滑因子f函数表达式,含有路径光滑参数λ,光滑因子f的值决定了AGV已行驶路径的光滑程度。当f的值大于1时,说明路径不光滑,将重新选择路径点;当f的值小于1时,左右说明路径较为光滑,平均每个节点的φi都小于90度,满足路径光滑条件。式中的Mcurrent是指这一条路径上的已经走过的节点数,即AGV行驶中需要变换方向的节点。
根据全局信息因子ω,避障因子γ和光滑因子λ,改进的转移概率计算公式如下:

避障因子(γij)t通过正负值差异来判断是否在下一时刻有障碍物,为保证避障因子在整个转移概率公式中起作用,即保证的分子不为双数。如上式所示,在路径不是很光滑的情况下,则f的值变大,的值就会变小,从而整个转移概率在避障因子计算后,再通过比较大小得出最光滑的路径。
2.3 信息素更新策略
原蚁群算法中,通过构造关于信息素浓度和时间的函数关系来达到这一功能。原下一时刻信息素浓度的计算公式如下:

式 (10) 中,τij(t)为t时刻节点i到节点j路径上的信息素浓度,τij(t+1 )为t+1时刻节点i到节点j路径上的信息素浓度;(1-ρ)为信息素残留系数;ρ为信息素挥发系数。
当ρ的值较大时,信息素挥发加快,对应路径上的信息素残留浓度小;当ρ的值较小时,信息素挥发缓慢,对应路径上的信息素残留浓度大。
针对信息素挥发系数ρ,同样引入避障函数γij(t),改进更新的信息素挥发系数ρ(t)为:

式(13)中,ρ0为初始信息度浓度;Ncurrent为当前迭代次数;Nmax为算法最大迭代次数。
引入避障函数γij(t)之后,改进的信息素挥发系数ρ(t)在有障碍的路径上挥发率大幅增加,使错误节点的信息素残留少,降低了错误节点的转移概率。
在算法开始初期,经过的节点数较少,ρ(t)信息挥发系数较小,各节点上的信息素残留浓度较大,降低了算法陷入局部最小值的概率;随着算法到后期,经过节点数增多,信息素挥发系数增大,算法收敛加快。将式(13)代入式(10)中,得到改进后的随时间变化的信息素更新方法为:

改进后蚁群算法流程图如图3所示。
3 仿真实验分析
为了验证改进蚁群算法在AGV全局路径规划中的有效性,本文根据广东某物流企业的实地生产线,构建40m×50m的物流工厂环境模型,令AGV的起点为S( 5,3 5 ),AGV的目标点T( 45,5)。在空间中含有4个凸多边形作为障碍物。

在蚁群算法初始化中,设定信息素浓度Q=10,信息素挥发系数初始值ρ0=0.1,信息素初始值τ0=0.004。蚁群中的蚂蚁数量为20,启发函数的启发因子数β=5,信息素影响因子为α=1,最大迭代次数为Nmax=100。
基于上述初始化的参数设置,在应用传统蚁群算法之前先应用A*算法,目的是利用A*算法为传统蚁群算法先运算出避开障碍的节点。
改进蚁群算法分别进行实验,搜索得到的最优化路径分别如图4、图5和收敛速度曲线如图6、图7所示。
图4和图5中的粗实线为算法得到的最优化路径。改进算法和传统蚁群结合A*算法的路径光滑因子f的值分别为0.20和2.4。可见,传统蚁群算法路径论光滑程度不如改进蚁群算法的路径,图5中在节点P30、P6和P12处有突变,改进蚁群算法路径仅在节点P12处出现突变。由图6和图7可见,改进蚁群算法在迭代次数为43左右收敛,而传统蚁群算法在迭代次数60左右收敛。改进算法收敛速度快于传统算法。
所示的仅为一次实验的结果,在初始化参数设置相同的情况下,对上述两者分别进行50次仿真实验。得到实验结果在图8和图9中所示,经过计算,改进蚁群算法的平均最优路径为60.31m,传统蚁群算法为68.24m,改进算法比传统蚁群算法短;改进蚁群算法的平均达到最优路径的迭代次数为46次,就已经收敛,传统蚁群算法为迭代75次后收敛,改进算法比传统蚁群算法达到最优路径的迭代次数较少。各评价系数平均值如表1所示:
4 结束语
本文提出了基于改进蚁群算法中的AGV路径规划方法,在启发函数中引入了避障条件,优化路径光滑,构造全局信息因子,来应对AGV面对的复杂地形,找寻避开障碍的光滑最优路径,达到保证安全、提高作业效率的目的。通过实验仿真,验证了该改进算法不仅具备避开障碍的能力,且规划的最优路径和迭代次数均优于传统蚁群算法结合A*算法。研究结果将提高AGV应用的自动化程度,对未来AGV在应对复杂物流环境有着一定的价值。
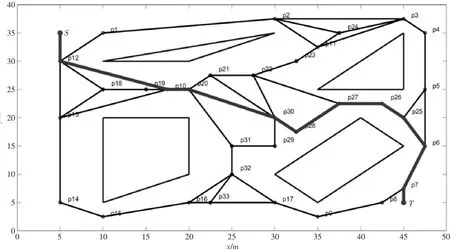
图4 传统蚁群结合A*算法规划结果
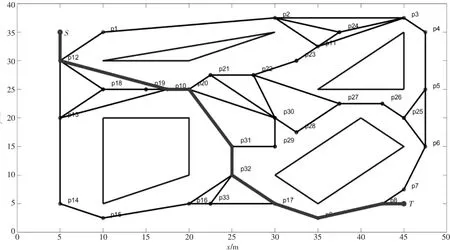
图5 改进蚁群算法规划结果
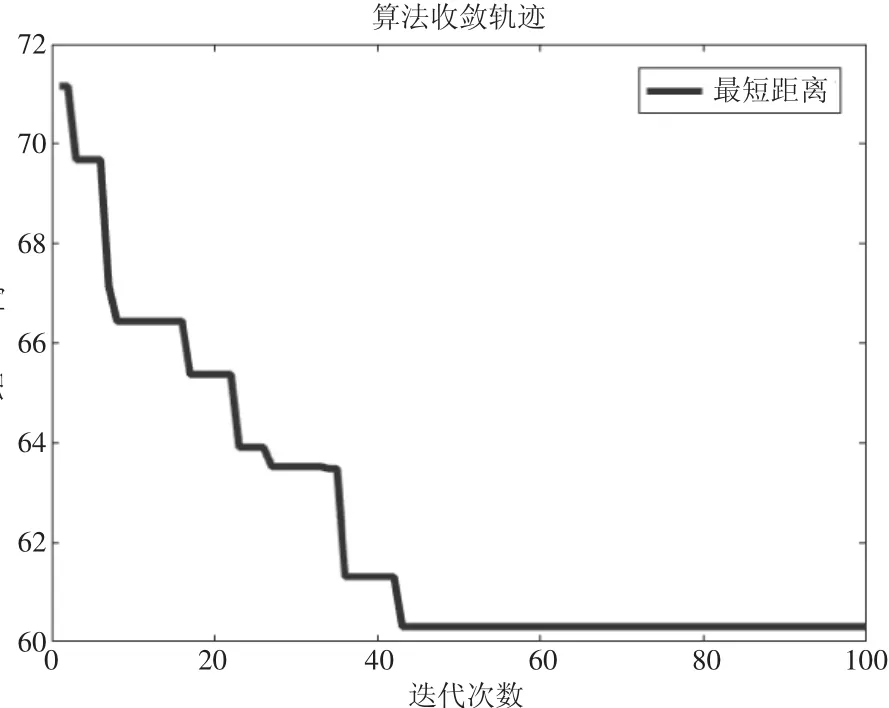
图6 传统蚁群迭代次数
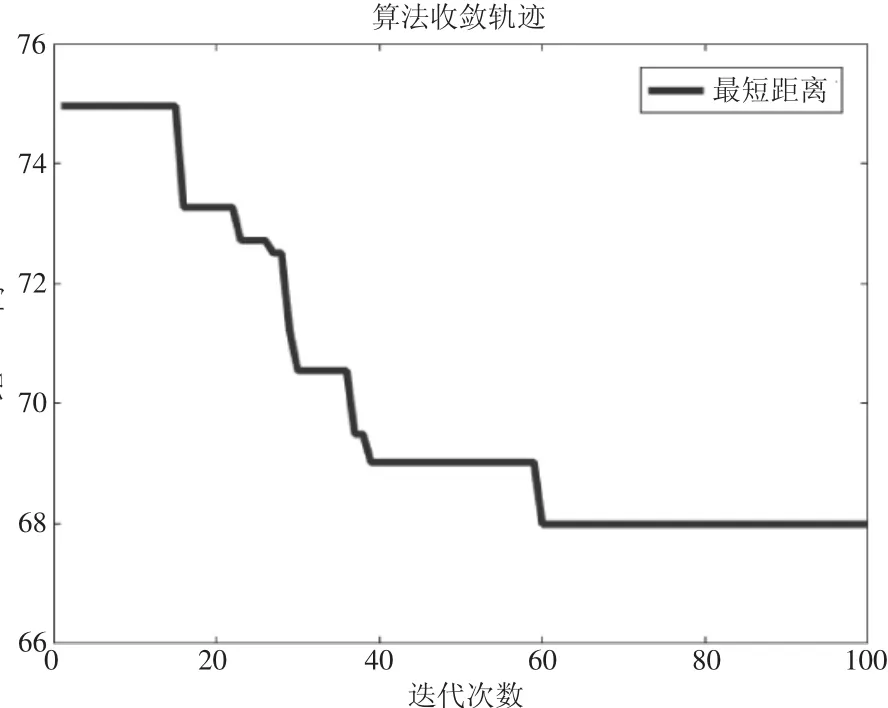
图7 改进蚁群算法迭代次数

表1 各评价参数平均值

图8 两种算法最优路径距离

图9 两种算法最优迭代次数
[2] 汤红杰,王鼎,皇攀凌,等.优化Dijkstra算法在工厂内物流AGV路径规划的研究[J].机械设计与制造,2018(5):117-120.
