联轴器试验系统偏摆装置优化设计
2019-04-09青克尔杨秀光王荣刚
青克尔,杨秀光,白 峰,王荣刚
(中机试验装备股份有限公司,吉林 长春 130103)
1 引 言
近20年来,我国铁路行业快速发展,高速铁路和地铁发展尤其迅速。联轴器是高速列车驱动的关键部件,其主要作用是将牵引电机的扭矩有效传递到齿轮箱中,并能适应牵引电机输出轴与齿轮箱之间较大的轴向、径向跳动的复杂环境。
随着高速铁路关键部件的国产化,测试联轴器性能的试验系统的研发成为试验机企业的巨大机遇和挑战,怎样使试验系统能够有效地模拟联轴器的实际运行工况成为重中之重。其中,模拟联轴器位移补偿功能的偏摆装置是试验系统的重要组成。
本偏摆装置是中机试验装备股份有限公司生产的联轴器试验系统的关键部件,能实现联轴器运行过程中轴向、径向偏移,具有位移行程能够有效控制的特点,同时能采集联轴器偏摆过程中产生的附加轴向和径向摩擦力。
2 联轴器主要技术指标
转速范围:0-7000r/min;
扭矩范围:±5000N·m;
轴向位移范围:±10mm;
径向位移范围:±20mm;
位移精度:±0.1mm;
位移频率:0-2Hz;
测力范围:0-30kN。
3 偏摆装置结构及工作原理
3.1 工作原理
本偏摆装置主要由轴向、径向直线作动器,轴向、径向力传感器,轴向、径向位移传感器,液压系统,伺服控制系统等组成,工作原理图如图1所示。被测联轴器数量为2个,中间安装1个轴承座,轴向和径向直线作动器推动中间轴承座做轴向和径向移动,从而联轴器产生轴向和径向偏移。液压系统为直线作动器提供动力源,伺服控制器精确控制直线作动器的位移量,力传感器采集联轴器产生的摩擦力。
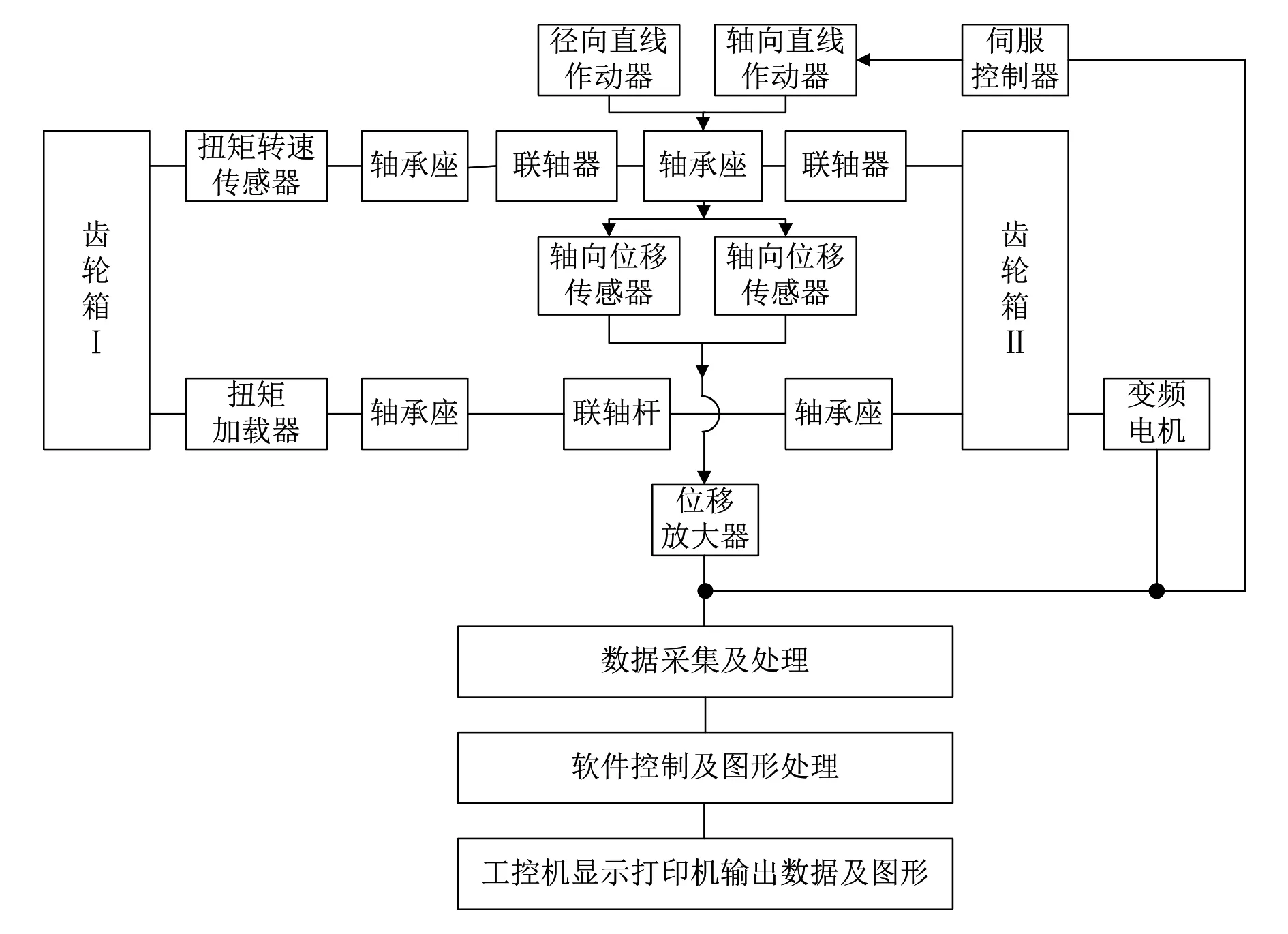
图1 工作原理图
3.2 偏摆装置结构
偏摆装置结构主要由轴向支撑台、径向支撑台、轴向伺服作动器、径向伺服作动器、轴向作动器安装座、径向作动器安装座、轴向直线导轨、径向直线导轨、标尺、伺服阀、伺服阀块、力传感器、位移传感器、轴向径向液压胶管等几部分组成。
(1)偏摆装置结构Ⅰ
偏摆装置结构Ⅰ主要特点是轴向和径向作动器逐层叠加安装,径向直线作动器缸筒端固定在工作台上,活塞杆端固定在径向支撑台上,轴向直线作动器缸筒端固定在径向支撑台上,活塞杆端固定在轴向支撑台上,轴向支撑台通过导轨安装在径向支撑台上,轴向支撑台上安装联轴器中间轴承座,如图2所示。

图2 偏摆装置结构Ⅰ
(2)偏摆装置结构Ⅱ
偏摆装置结构Ⅱ主要特点是轴向和径向作动器均独立安装,径向直线作动器缸筒端固定在工作台上,活塞杆端固定在径向支撑台上,轴向直线作动器缸筒端也固定在工作台上,活塞杆端固定在轴向支撑台上,径向支撑台通过导轨安装在轴向支撑台上,轴向支撑台上安装联轴器中间轴承座,如图3所示。
图3 偏摆装置结构Ⅱ
3.3 液压系统
液压系统主要为摆动作动器和直线作动器提供动力,如图4所示,主要由油泵电机组、油箱、油源冷却系统、动力配电箱、管路系统及液压附件组成,设计流量为60L/min,额定压力为28MPa,冷却系统采用钎焊板式换热器。

图4 液压系统
3.4 伺服控制系统
伺服控制系统包括强电控制系统、工控机、可编程控制器(PLC)及试验软件等部分,由控制器、驱动器、放大器等组成,电控系统给定的电信号与位移传感器输出的反馈信号比较,将差值信号送至电液伺服阀,闭环控制直线作动器位移量。试验软件系统运行在WINDOWS操作系统上,所有操作均在虚拟界面上进行,操作直观,便捷。
4 偏摆装置运动分析
4.1 偏摆装置结构Ⅰ
偏摆装置结构Ⅰ的轴向直线作动器安装在径向支撑架上,轴向直线作动器的零点位置随径向直线作动器的运动变化,所以该结构的轴向、径向直线作动器的位移就是联轴器的轴向和径向偏移量,试验数据如表1所示。

表1 偏摆装置结构Ⅰ位移值
4.2 偏摆装置结构Ⅱ
偏摆装置结构Ⅱ的径向直线作动器轴线与联轴器的轴线夹角随着轴向直线作动器的运动发生变化,因此联轴器实际径向位移与径向直线作动器的命令值存在偏差。偏摆装置简化结构图如图5所示。
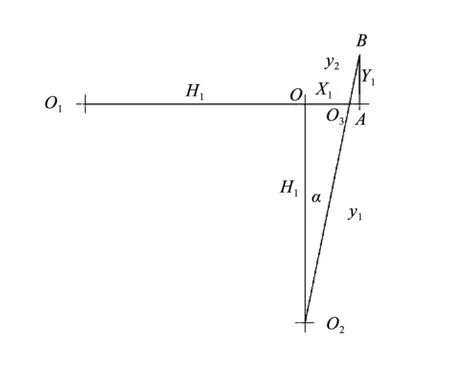
图5 偏摆装置结构Ⅱ结构简图
H1为直线作动器长度,O和O1为轴向直线作动器活塞和缸筒支点,O2和O3为径向直线作动器缸筒和活塞支点,A为轴向直线作动器的运动瞬时位置,B为径向直线作动器运动的瞬时位置。
轴向和径向运动位移为:
式中:x为轴向油缸运动振幅;y为径向油缸运动振幅;f1为轴向油缸运动频率;f2为径向油缸运动频率;φ为轴向油缸与径向油缸相位差;t为运动时间。
根据三角函数关系可得:
则有:
其中,y1为O2O3的长度。
其中,y2为O3B的长度。
径向作动器需要实现位移量为:
Y=y1+y2-H1
从上述函数关系可得,当轴向位移达到最大时,夹角α最大,径向位移达到最大时产生的误差最大,计算结果如表2所示。
5 结束语
本文介绍了联轴器试验系统的两种偏摆装置结构,从计算和试验结果可知,两种结构均能满足联轴器性能试验的模拟轴向径向偏移工况,且位移精度均在0.1mm以内。两种偏摆机构的区别在于,偏摆装置Ⅰ的结构紧凑,但垂直高度较高,不适用于垂向高度尺寸受限制的试验系统;偏摆装置Ⅱ具有垂向高度低和高刚度的特点,但此种结构当轴向位移需求达到15mm时,径向位移控制精度达不到0.1mm精度要求,需要采用具有耦合加载功能的控制器才能满足要求。

表2 偏摆装置结构Ⅱ位移值
