地铁隧道自由设站变形监测基准网稳定性检验
2021-04-28李益斌
李益斌,陈 健
(1.江苏省地质矿产局第四地质大队,江苏 苏州 215129;2.南京林业大学土木工程学院,江苏 南京 210037)
0 引 言
目前,在众多自动化监测手段中,测量机器人自动化监测是地铁隧道自动化变形监测的主流监测手段,在全国各地的地铁保护区隧道监测项目中得到广泛应用[1-3]。测量机器人自动化监测采用“自由设站”的测量模式,通过照准基准点采用后方交会的方式得到测站坐标,再以测站坐标采用极坐标的方式采集监测点的坐标,根据监测点坐标的变化求取变形信息。基准点的稳定可用性是整个变形监测顺利进行的基础保障,由于地铁隧道所在区域地形条件所限,基准点大多布设在临近变形区域,因此,对基准网进行稳定性分析很有必要,以便及时发现基准点的变动,避免将基准的变化引入监测点的变形信息[3]。
传统的基准点稳定性分析方法基本上都是基于统计学理论,采用自由网平差解算每期基准点坐标后,根据点位的位移信息构建统计量,采用统计检验的方法进行稳定性分析。而自由设站的测量模式是采用经典平差进行测站坐标的解算,因此,传统的基于“自由网平差”模式的稳定性分析方法不适用于自由设站的“经典平差”模式[4]。本文立足自由设站测量原理,寻求简便有效的方法,引用后验单位权方差χ2检验法,对地铁隧道自由设站变形监测基准网的稳定性进行分析。
1 自由设站测站平差模型
地铁隧道监测基准点往往布设在认为是稳定的区域,工作基点布设在变形区域。监测基准点与工作基点的关系如图1所示。基准网类似边角后方交会,在基准点上不能架设仪器,只能在工作基点上进行全边角测量[5-8]。
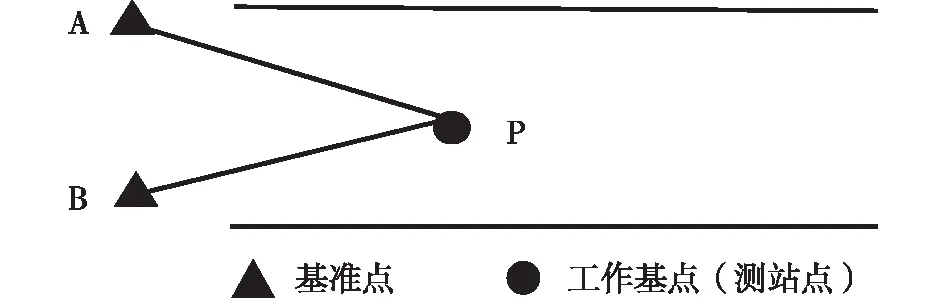
图1 地铁隧道自由设站变形监测基准网
自由设站测站平差采用间接平差法,列出角度和边长的误差方程式:

(1)
式中的各项具体表达形式为:
(2)
(3)


列出法方程:
(4)
单位权中误差估值:
(5)
式中,f为自由度,即多余观测数。
2 基于后验单位权方差的χ2检验


图2 后验单位权方差χ2检验流程
3 实例分析
选取5个基准点有以下六种排列组合的方式,分别进行检验,检验的结果如表1所示。
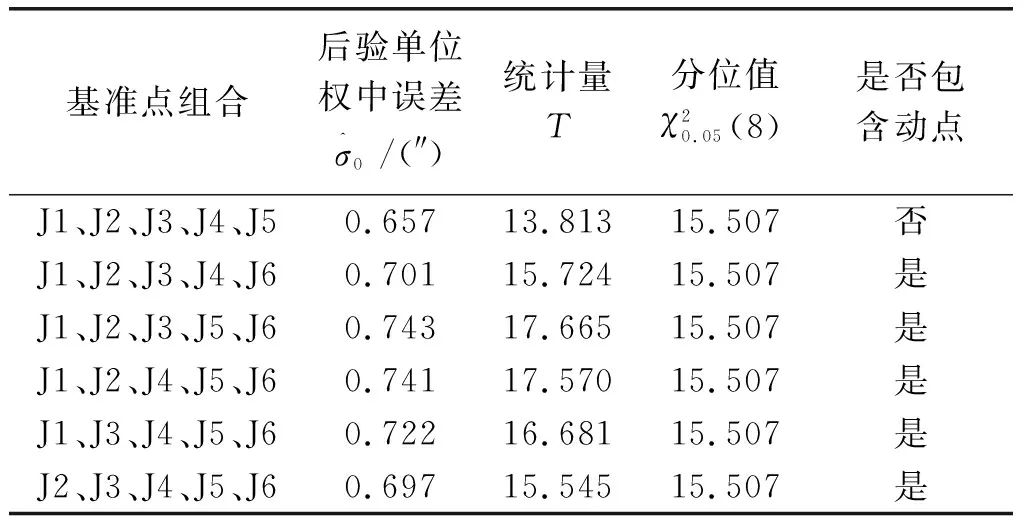
表1 5个基准点的组合检验结果
从表1可以看出,除了第一组基准点的组合通过了检验以外,另外五组组合都没有通过检验,这五组基准点的组合中都含有基准点J6,由此可以快速得出结论,J1~J5是基准网中稳定的点,基准点J6发生了显著变动。
为了进一步验证检验判断的正确性,选择4个基准点分别组合再次进行检验,4个基准点有15种组合方式,分别进行检验的结果如表2所示。
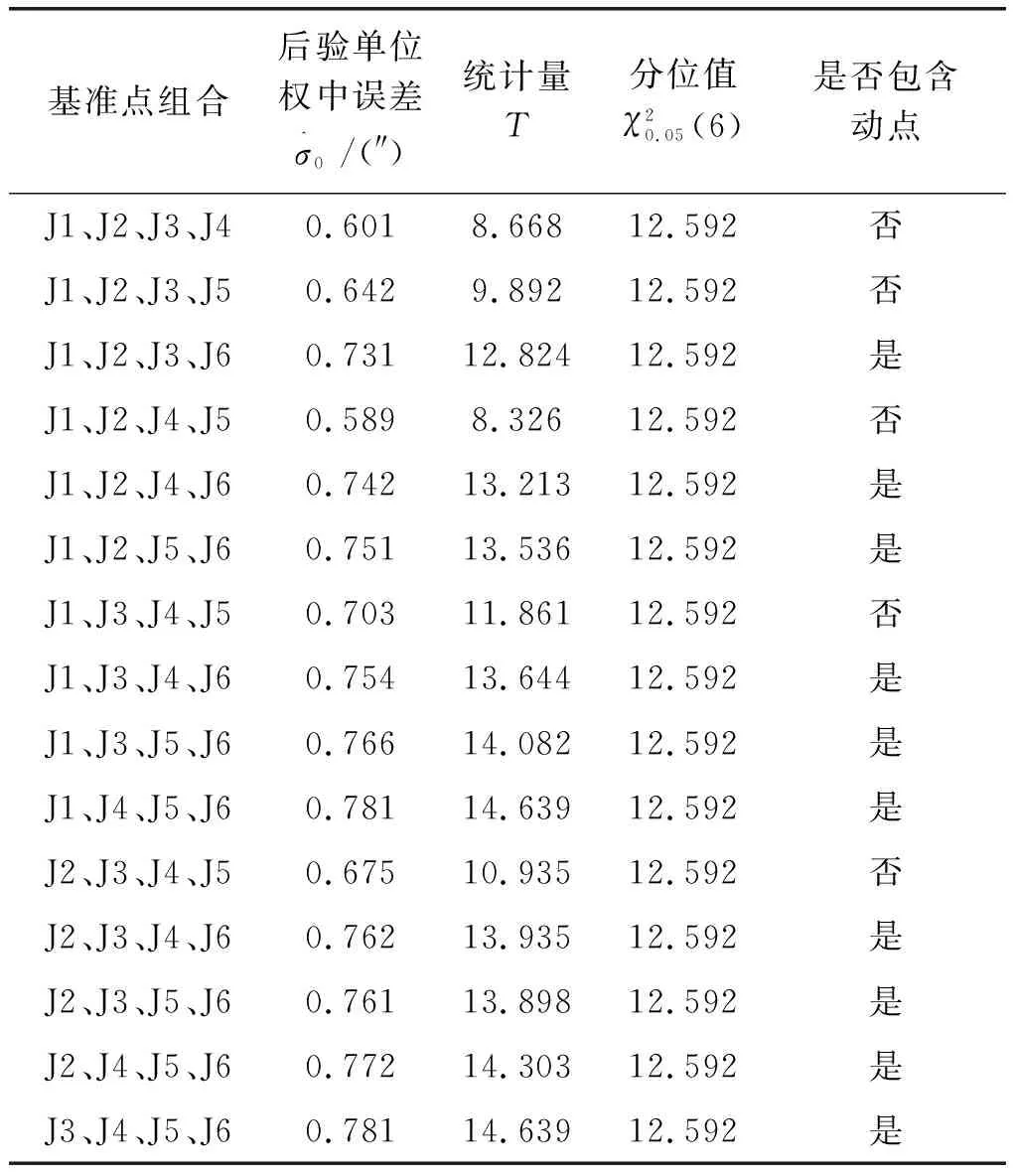
表2 4个基准点组合的检验结果
由上表2依旧可以看出包含基准点J6的组合没有通过检验,J6为不稳定基准点,所以在实际的监测中,应当剔除基准点J6,构成新的基准网以保证获取正确的变形监测数据。需要特别说明的是,由于理论上至少需要布设2个基准点才能采用自由设站法进行监测,当稳定的基准点小于2 h,应当重新建立新的基准。
4 结 语
在地铁隧道狭长空间中进行测量工作,存在控制点不通视、仪器设站不便等问题,自由设站法能避免诸多复杂工作环境的影响,已广泛应用于运营地铁隧道监测中。监测基准网的稳定性是地铁隧道监测的基础,为了保证监测数据的可靠性,应当定期对监测基准网进行稳定性检验。
区别于其他监测方法所采用的自由网平差,自由设站监测方法采用的是经典平差,传统的立足于自由网平差的基准点稳定性检验方法,如平均间隙法、分块间隙法等在此无法应用,本文引用后验单位权方差χ2检验法,通过实例分析,验证了这一方法的实用性,证明其是一种简便有效的判定基准网中稳定基准点的方法。