均匀面阵跳频信号2D-DOA快速估计算法
2019-04-08陈江汉
廖 颖, 陈江汉
(1.眉山职业技术学院,四川 眉山 620010;2.武汉大学 计算机学院,武汉 430072)
0 引 言
跳频通信系统是指在相同的同步算法和伪随机跳频图案算法的控制下,射频频率在约定的频率范围内伪随机且同步跳变的通信方式。跳频通信是现代通信中最为重要的一种抗干扰技术手段,在军事和民用通信领域得到广泛应用。同时,也给通信对抗侦察带来了严峻挑战[1-3]。
跳频信号的参数估计指的是在通信接收机检测到跳频信号后,对检测到的跳频信号的跳时刻、跳周期、频率集合、DOA参数等进行估计。针对跳频信号的参数估计问题,现有算法大多集中在时频域的参数,较少关注空域参数。跳频信号空域参数估计主要分为稀疏重构法和空时频分析法,其中稀疏重构法算法复杂。文献[4]中提出一种已知信源个数的跳频信号DOA估计算法,但是该算法只适用于超定条件下,并且算法复杂度较高。文献[5-6]中第1次提出了空时频概念,并将其用于非平稳信号的DOA估计;由于空时频发具有较好的信号选择性以及抑制噪声特性,因此,取得了比传统方法更优的估计效果。文献[7]中提出一种基于空时频分析法的跳频信号DOA估计算法,思路新颖,取得了良好的估计性能。文献[8-9]中将波达方向上升到二维空间,提出一种空间极化时频分布与ESPRIT算法结合的跳频信号二维DOA估计算法,这种算法能够实现目标的三维定位,但是对阵列的要求较高;文献[10-11]中提出了一种基于2D-MUSIC的跳频信号2D-DOA估计算法,这种算法对阵列没有特殊要求,方法简单易于实现,但是算法复杂度较高。综合以上问题,本文提出一种基于求导的降维MUSIC的均匀面阵跳频信号2D-DOA快速估计算法。该算法将二维DOA估计问题转化为两级一维DOA估计问题,避免了峰值搜索与配对,降低了算法复杂度。同时,在DOA参数求解过程中始终保持了方向向量各元素间的相关性,提高了算法的估计性能。
1 跳频信号与空时频矩阵模型
1.1 跳频信号模型
假设第n个跳频信号sn(t)的跳周期为Tn,在观测时间内共有K个完整跳,第k(k=1,2,…,K)个完整跳的中心频率为fnk,初相为φnk,最开始非完整跳的持续时间为Δtn0,中心频率为fn0,初相为φn0,则

(1)
式中,rect(t)表示单位矩形脉冲函数。假设在观测时间(0,T]内共有N个跳频信号,则接收信号可表示为
(2)
式中:sn(t)表示第n个跳频信号;cn表示第n个跳频信号的幅度;v(t)表示均值为零,方差为σ2的高斯白噪声。
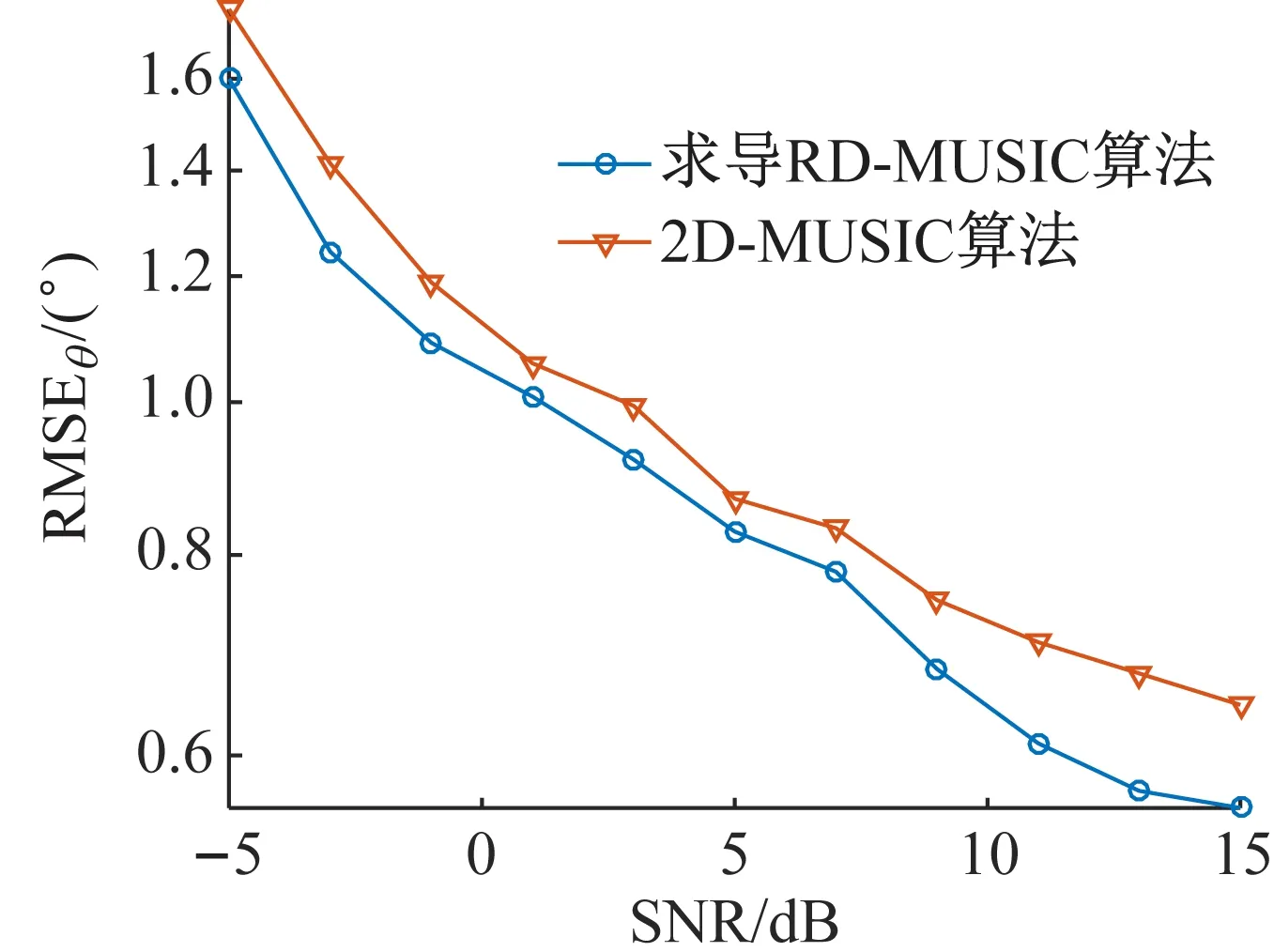
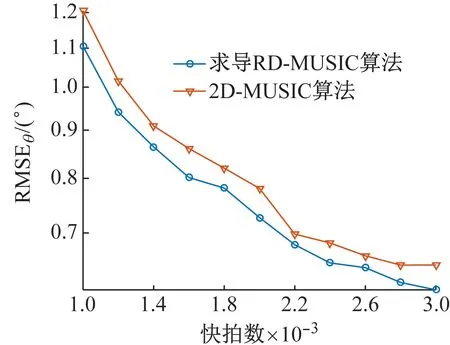
假设阵列结构为均匀面阵,x轴方向有N个阵元,y轴方向有M个阵元,阵元间距为d,并且满足d 图1 入射角度示意图 假设阵元噪声为高斯白噪声,坐标原点处的阵元为参考阵元,则均匀面阵中任一阵元的输出可以表示为[12]: (3) 式中:yknm表示x轴位置为n,y轴位置为m的第k个跳频信号的阵元输出;δknm表示x轴位置为n,y轴位置为m的第k个跳频信号的接受增益; τknm=d(ncosθksinφk+msinθksinφk)/λ λ为入射波的波长,表示x轴位置为n,y轴位置为m的第k个跳频信号相对于参考阵元信号的时延;vnm(t)表示噪声信号。 由图1的入射角度示意得到: (4) 推导出θk与φk的表达式为: (5) x轴上N个阵元的导向矢量 Αx= [a1(θ1,φ1),a2(θ2,φ2),…,an(θk,φk)] (6) 式中, an(θk,φk)=an(αk)= [1,ej2πdcos αk/λ,…,ej2πd(N-1)cos αk/λ]T y轴上M个阵元的导向矢量 Αy=[b1(θ1,φ1),b2(θ2,φ2),…,bm(θk,φk)] (7) 式中, bm(θk,φk)=bm(βk)= [1,ej2πdcos βk/λ,…,ej2πd(M-1)cos βk/λ]T 根据式(6)、(7)可得,由导向矢量组成的阵列流型矩阵为: A= [ΑxD1(Αy),ΑxD2(Αy),…,ΑxDM(Αy)]T (8) 式中,Dm(·)表示由矩阵Αy的m行构造的一个对角矩阵。 因此,将跳频信号表示成矢量形式,阵列的快拍矢量模型为: X(t)=Y(t)+V(t)=AS(t)+V(t) (9) 式中:X(t)表示阵列接收信号的数据矢量;S(t)表示信源的数据矢量;V(t)表示阵列的噪声数据矢量。 跳频信号是载频随机跳变的宽带信号,因此构建的均匀面阵的流型矩阵也随着载频跳变而变化,但是只考虑某一跳持续时间内时,每个跳频信号的载频都是恒定的,因此流型矩阵也是固定的,可以将其简化为窄带信号处理。因此,本文首先采用文献[8]中介绍的组合时频法将跳频信号分解为一个个跳,然后选择时频图上一跳来构造空时频矩阵。 跳频信号xi(t)与xj(t)离散形式的Cohen类互时频分布定义为[13-14]: (10) 因此,跳频信号x(t)的空时频分布定义为: XH(t+l-τ)e-j4πfτ (11) 式中, [DXX(t,f)]ij=Dxixj(t,f) 为各阵列输出信号之间的互时频分布。因此,跳频信号的时频域协方差矩阵为: E[DXX(t,f)]=E[DYY(t,f)]+E[DNN(t,f)]= ADSS(t,f)AH+E[DNN(t,f)] (12) (13) 式中:US为K个大特征值对应的特征向量张成的信号子空间;UN为(NM-K)个小特征值对应的特征向量张成的噪声子空间;Ξ为E[DXX(t,f)]特征值组成的对角矩阵。 因此,根据正交子空间原理,由噪声子空间UN构造的2D-MUSIC算法空间谱函数P2D-MUSIC可以表示为[15-16]: P2D-MUSIC= (14) 根据P2D-MUSIC,通过二维搜索,使得P2D-MUSIC取得极值的(θ,φ)即为跳频信号的二维DOA参数。这种方法虽然简单有效,但是需要在跳频信号的方位角和俯仰角的所有定义域内进行谱峰搜索,使得算法运算量较大。 根据P2D-MUSIC定义检测量 Ψ(αk,βk)=[an(αk)⊗bm(βk)]HUN· (15) 可以进一步变形为: 企业建立先进的经济管理制度之后,管理者如果没有将管理制度落实,加之企业内部不同的管理部门职责没有真正落实,员工的实际工作就没有落实,以上因素都是造成企业无法适应经济体制发展的阻碍,甚至对企业的正常发展造成影响。为了实现管理制度的实际作用,建立对应的制度,企业要关注经济制度的具体落实情况,不同部门的员工和管理者要明确经济制度的含义和价值,将经济制度落实在日常工作中,保证企业发展的稳健。 (16) (17) 假设αk为固定值,βk为待计算的值,检测量Ψ(αk,βk)对βk求导并令其导数等于零,即: ∂Ψ(αk,βk)/∂βk=0 (18) 根据式(18)将αk作为搜索对象最终得出βk的值。式(18)的具体求解过程为:令ck=ej2πdcos βk/λ,则 式(18)可以转化为: (19) (r11+r22+…+rMM)+ (20) 根据式(19)、(20)可以进一步得到: (r12+r23+…+r(M-1)M)+ (21) 根据多项式求根可知,式(21)存在2(M-1)个根,但是只有落于单位圆上的根才是ck真正的解。由于噪声的影响,根据式(17)可以求得αk的估计值为: (22) 根据式(22)对αk进行搜索,搜索出的K个峰值即为αk的估计值,然后进一步可以得到βk的估计值为: (23) 根据式(22)、(23)的αk、βk的估计值结合式(4)即可以得到跳频信号的方位角θk与俯仰角φk。 综上所述,本文所提算法只需要在αk估计时进行一维搜索,并且βk的估计值与αk的值一一对应,不需要角度匹配。 根据上述的理论推导,基于求导的降维MUSIC的均匀面阵跳频信号2D-DOA快速估计算法的步骤可以归纳为: 步骤1根据式(8)构建跳频信号阵列的快拍矢量模型; 步骤2根据式(11)得到跳频信号的时频域协方差矩阵; 步骤3根据式(13)构建跳频信号2D-DOA估计的空间谱函数; 步骤4根据式(21)对αk进行搜索估计出αk,然后根据式(22)求解得到βk的估计值; 步骤5根据估计出的αk和βk,运用式(4)计算出跳频信号的2D-DOA参数。 假设阵列为图1所示的均匀面阵,阵元间距d=10 m;入射信号为4个跳频信号(FH1~FH4),跳周期均为10 μs,采样率为50 MHz;其方位角和俯仰角参数(θ,φ)分别为(20°,40°),(80°,75°),(40°,60°),(70°,70°)。 采用方位角和俯仰角估计的均方根误差来衡量算法的有效性。方位角和俯仰角的RMSE定义为: (24) 为了验证算法性能随噪声的信噪比变化的影响,假设均匀面阵的x、y轴方向的阵元数均为7个,每跳的快拍数均为1 500,信噪比从-5 dB以2 dB为步进递增至15 dB,求导RD-MUSIC算法和2D-MUSIC算法的方位角和俯仰角的RMSE如图2所示。 (a) RMSEθ (b) RMSEφ 从图2可以看出,随着信噪比的增加,求导RD-MUSIC算法和2D-MUSIC算法的跳频信号方位角和俯仰角的估计精度都越来越高,但是信噪比达到一定值时估计精度趋于稳定;求导RD-MUSIC算法的估计精度整体上要高于2D-MUSIC 算法;低信噪比条件下,求导RD-MUSIC算法和2D-MUSIC算法的估计性能相差不大,高信噪比条件下性能相差较大。 为了验证快拍数对算法性能的影响,假设均匀面阵的x、y轴方向的阵元数均为7个,信噪比为5 dB,每跳的快拍数从1 000以200为步进递增到2 000,求导RD-MUSIC算法和2D-MUSIC算法的方位角和俯仰角的RMSE如图3所示。 (a) RMSEθ (b) RMSEφ 由图3可以看出,随着阵元数的增加,求导RD-MUSIC算法和2D-MUSIC算法的方位角和俯仰角的估计精度都逐渐增加,但是当快拍数达到2 400左右时,估计精度趋于稳定;不同快拍数下求导RD-MUSIC算法的估计精度要高于2D-MUSIC算法。 为了验证阵元数对算法性能的影响,假设每跳的快拍数均为1 500,信噪比为5 dB,均匀面阵的x、y轴方向的阵元数从5个以1为步进递增至15个,求导RD-MUSIC算法和2D-MUSIC算法的方位角和俯仰角的RMSE如图4所示。 由图4可以看出,随着阵元数的增加,求导RD-MUSIC算法和2D-MUSIC算法的估计精度都越来越高;求导RD-MUSIC算法的估计精度整体上要高于2D-MUSIC算法,阵元数小于10时,两种算法的估计精度相差不大,阵元数大于10后,求导RD-MUSIC算法的估计精度要远高于2D-MUSIC算法。 本文提出一种基于求导降维MUSIC的均匀面阵跳频信号2D-DOA快速估计算法,该算法将二维波达方向估计问题转化为两级一维波达方向的估计问题。相比较传统2D-MUSIC算法,所提算法避免了二维角度搜索与配对,大大降低了算法复杂度。同时,在求解过程中始终保持了方向向量各元素间的相关性,提高了算法的估计性能。仿真结果表明,本文算法不仅可以提高运算时间还可以提高估计精度。 (a) RMSEθ (b) RMSEφ
1.2 跳频信号协方差矩阵的构造
2 跳频信号2D-DOA的估计
2.1 基于2D-MUSIC算法估计2D-DOA
2.2 基于求导RD-MUSIC算法估计2D-DOA








3 算法步骤
4 仿真与分析

4.1 实验1

4.2 实验2

4.3 实验3
5 结 语