汽车前撞预警系统传感器测距精度测试与研究
2019-04-08牛成勇苏占领吴昆伦徐建勋游国平
牛成勇,苏占领,吴昆伦,徐建勋,游国平
(1.重庆车辆检测研究院有限公司 国家客车质量监督检验中心,重庆 401122;2.汽车主动安全测试技术重庆市工业和信息化重点实验室,重庆 401122;3.自动驾驶系统及智能网联汽车技术研发与测试应用重庆市工程研究中心,重庆 401122)
汽车前撞预警系统(FCWs)通过视觉或雷达感知系统实时监测前方车辆,判断两者之间的距离、方位及相对速度等,当系统探测到前方区域存在潜在碰撞危险时,及时提醒并警告驾驶员采取相应措施以规避风险。然而,FCWs的关键技术在于车辆测距,测距技术能够为其提供深度信息支持,保障行车安全。
随着国家标准《智能运输系统车辆前向碰撞预警系统性能要求和测试规程》(GB/T 33577—2017)及交通行业标准《营运客车安全技术条件》(JT/T 1094—2016)的相继发布和实施,不同传感器方案的FCWs广泛应用于乘用车及营运客车上。因此,需要对国内各供应商的FCWs产品性能,尤其是测距精度进行对比、分析,让国内各大整车厂更加了解FCWs测距性能,也能为相关零部件供应商更好地研发FCWs产品提供技术参考。同时,指出目前在测距精度测试与评价中存在的问题并提出相关建议,为标准的进一步修订和完善提供借鉴。
1 汽车FCWs测距精度评价方法
1.1 汽车FCWs传感器类型及特点
目前,广泛应用于汽车上的FCWs测距方式主要有毫米波雷达测距、视觉(摄像头)测距及毫米波雷达+摄像头信息融合测距3种。现就该3种传感方案测距原理进行介绍并作分析。
1.1.1 毫米波雷达测距
雷达测距是通过目标对电磁波的反射来探测前方障碍物的位置信息,包括距离、方位及相对速度等。目前,脉冲雷达测距和连续波雷达测距是毫米波雷达两种最主要的测距方式。
图1为脉冲雷达测距原理图,主要是利用电磁波发射和接收之间的时间差T来计算距离L。虽然测距原理较为简单,但在具体技术实现上,脉冲测距方式存在一定难度:硬件结构复杂,造价高。
连续波雷达测距采用调频连续波(FMCW)测距方式:(1)雷达天线向前方探测区域发射连续的调频信号,检测到目标时,会产生回波(与发射信号有一定延时)。(2)将发射信号与接收信号进行混频处理,以便从信号频谱中提取目标距离信息。(3)根据差拍信号间的相差来处理、计算出与目标的相对距离,如图2所示。图中,设定发射波中心频率为f0,频带宽度为B,扫频周期为T,调制信号为三角波,c为光速,V和R分别为目标的相对速度和相对距离。该测距方式雷达结构相对简单、尺寸小、质量轻且成本相对较低。
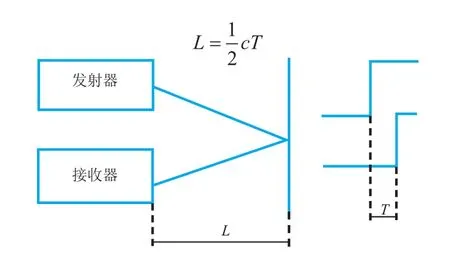
图1 脉冲雷达测距原理
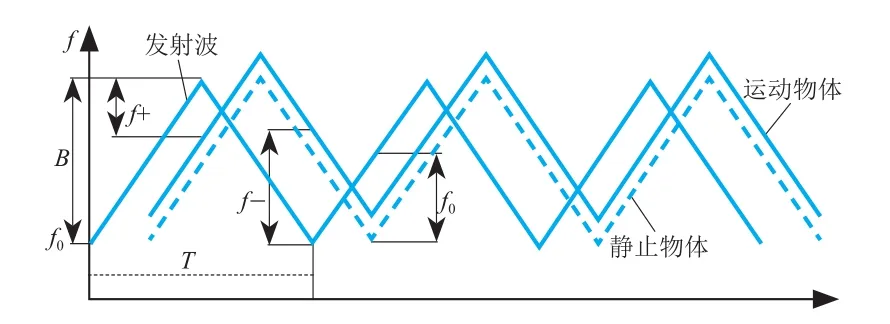
图2 连续波雷达测距原理
1.1.2 视觉测距
由于视觉测距技术测距精度相对较高且能够获取丰富的道路环境信息,所以在ADAs领域应用广泛。目前,应用于汽车上的视觉测距方法主要有两种:单目测距和双目测距。
1.1.2.1 单目视觉测距
单目视觉测距是利用一部摄像机采集单幅图像,通过摄像头内部及外部参数估算深度信息(或采用特征匹配及光流技术从图像序列中估算三维参数)。
单目测距优点:测距系统结构简单且运算速度快,成本低,不存在图像配准问题,实时性好,能满足实际应用要求。
1.1.2.2 双目视觉测距
双目测距是利用视差感知距离的方法模拟人类视觉系统,通过两部摄像机获取同一目标在不同位置的图像,并进行立体匹配以获得视差图,从而实现测距,即视差测距原理。
双目测距的关键在于相机的标定(双目校正)和左右图像对的匹配(双目匹配)。然而,双目测距在将三维场景投影成二维图像的过程中会不可避免地存在畸变、噪声、深度和不可见部分信息会被丢失等问题,极大地增加了双目匹配的难度。此外,采用多个摄像头,使系统的安装及图像的同步采集等技术难度也相应增加。
1.1.3 毫米波雷达+摄像头信息融合测距
信息融合测距原理:(1)毫米波雷达和摄像头分别针对目标障碍物实时采集数据信息。(2)对各传感器的输出数据进行特征提取与模式识别处理,并将目标按类别进行准确关联。(3)利用融合算法将同一目标的所有传感器数据进行整合,从而得出关于“目标威胁性”的一致结论。
与单独视觉或单独毫米波雷达方案相比,两者融合方案在系统分辨能力、数据可信度、系统鲁棒性和稳定性等方面更有优势。
1.2 测试规程
根据国家标准GB/T 33577—2017《智能运输系统 车辆前向碰撞预警系统性能要求和测试规程》和交通运输行业标准JT/T 883—2014《营运车辆行驶危险预警系统 技术要求和试验方法》中的要求,汽车FCWs报警距离精度测试按照以下规程进行。
测试在车辆行驶过程中进行,目标车辆需在检测区域内。自车以速度V=20 m/s朝目标车辆行驶,需测量两个时刻,如图3所示:第1个时刻为自车和目标车辆的车间距为d的时刻t0,第2个时刻为报警时刻t1。报警距离的计算公式为D=d−V× (t1−t0)。用该计算结果与制造商所设定的报警距离进行比较,在重复性测试中,报警距离精度需在70%以上次数的测试中达到测距精度要求(JT/T 883—2014:报警距离相对误差最大不超过 ±1 m 或 ±5%;GB/T 33577—2017:±2 m 或±15%)。其中,报警距离相对误差 的计算公式为:
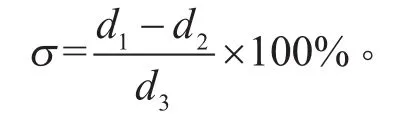
式中:d1为实际报警距离;d2为系统报警距离;d3为实际探测距离。
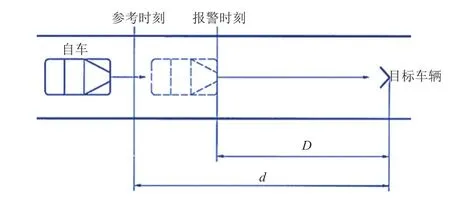
图3 报警距离精度测试方法
根据法规标准要求,搭建如图4所示的试验场景进行FCWs距离精度测试。

图4 FCWs距离精度试验场景
2 汽车FCWs传感器测距精度测试与结果分析
2.1 测试设备
汽车FCWs距离精度测试需要的测试设备主要有英国ABD sR60驾驶机器人,牛津RT惯导系统+GPs差分基站,德维创DEWE-501数据采集系统,通过Euro-NCAP认证的德国产目标假车,如图5所示。
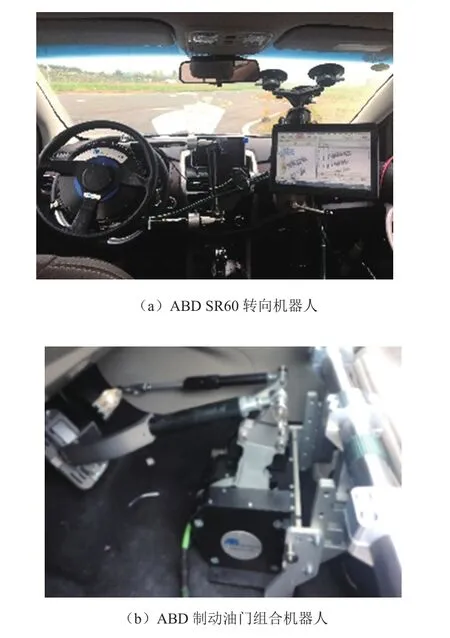
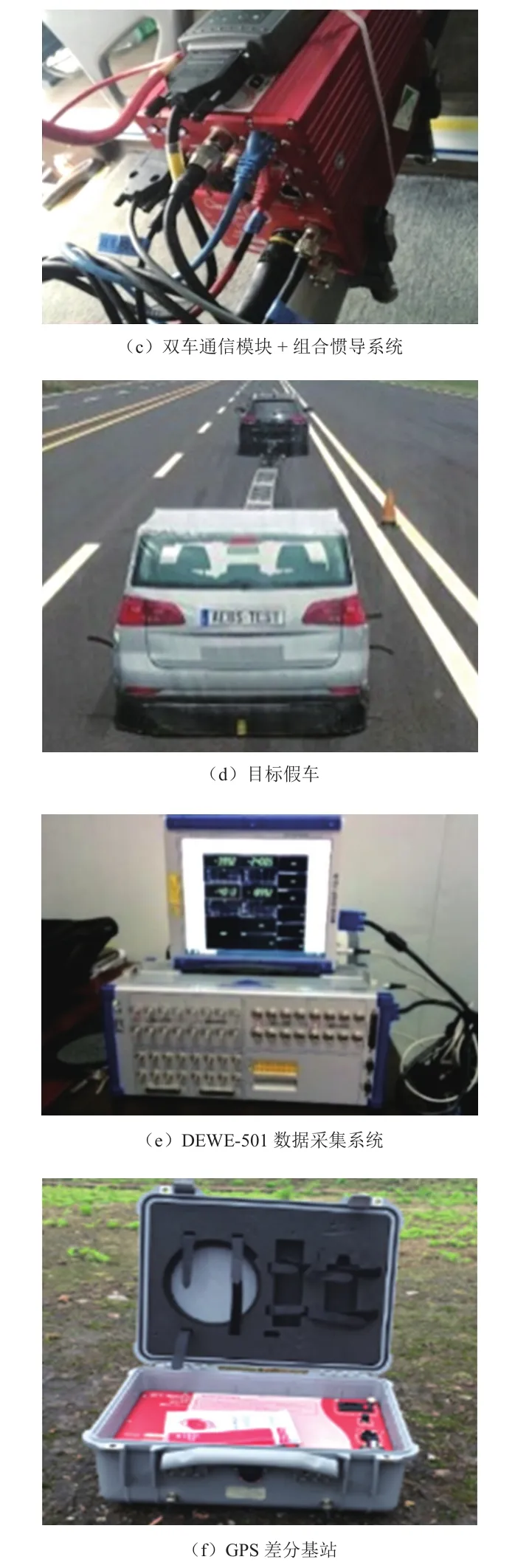
图5 FCWs报警距离精度测试设备
仪器测试精度:
(1)速度精度为0.05 km/h;
(2)加速度精度为0.01 m/s2;
(3)定位精度为0.02 m。
2.2 测试车辆信息
测试车辆的重要参数信息见表1(整车参数均为实测值,并非法规公告值;测试车辆为某MPV,且为空载状态)。
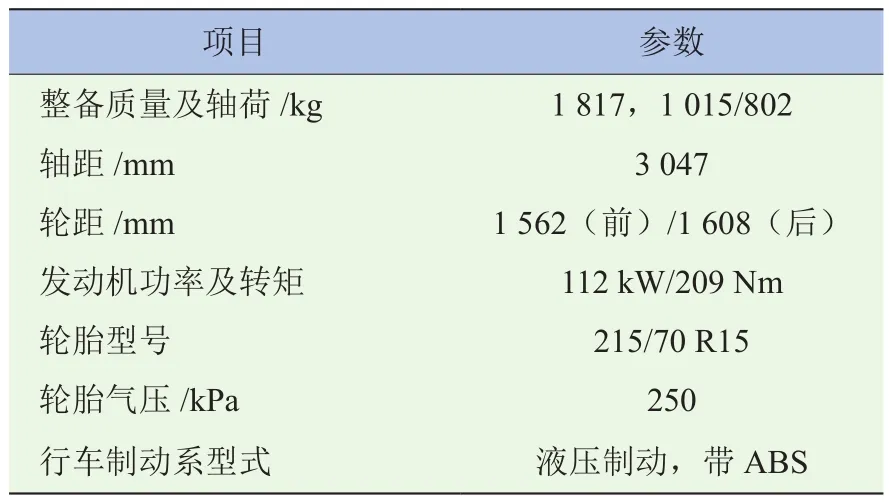
表1 测试车辆重要参数信息
2.3 汽车FCWs传感器方案
某MPV 所装备的FCWs传感器方案见表2。其中,毫米波雷达B1、B2分别采用国外、国内生产的雷达,单目摄像头均为国内供应商所生产。

表1 测试车辆重要参数信息
2.4 汽车FCWs测距精度测试结果分析
2.4.1 基于单目摄像头方案
(1)两种单目摄像头均采用机器学习算法进行目标障碍物检测,其测距方法为:
①单目摄像头A1测距方法采用“目标像素轮廓大小测距”,根据目标在相机平面上成像的尺寸、面积及摄像头安装高度(一般安装在汽车前挡风玻璃中间位置)拟合测距曲线以确定目标的距离。
②单目摄像头A2测距方法采用“目标底部阴影远近测距”,以目标车辆底部阴影作为感兴趣区域,获取该阴影在道路上的位置并还原车辆的宽度等信息,通过摄像头标定拟合测距曲线。
(2)测试结果分析:两种测距方法的测距精度如图6和图7所示。
由图可知,基于单目摄像头A1和A2的FCWs报警距离“相对误差”及“绝对误差”较大:σA1=11.52%(7.76 m),σA2=23.34%(13.82 m)。而且,由于一般单目摄像头的成像效果不太理想,导致车辆底部阴影识别效果较差,该测距算法不如“目标像素轮廓大小测距”算法。由此可见,国内单目摄像头测距精度不高,测距误差甚至高达十几米,达不到法规标准JT/T 883—2014的要求,A1产品能够“满足”GB/T 33577—2017要求(标准:±2 m或±15%,但若看测距误差7.76 m的话,不满足),具体原因分析如下。
①单目视觉识别精度低。根据上文提到的单目视觉测距原理可知,单目摄像头无法直接测量本车与前车的相对距离,而是通过“像素距离拟合出空间距离曲线”的测距方式近似获得。因此,其测距精度较差。
②单目视觉识别效率低。需要先对前方目标障碍物进行识别,然后再进行测距,即单目摄像头在进行测距前先识别障碍物是人、车或是其它物体。鉴于此,单目摄像头的天然劣势在于需要大型数据库且不断更新、维护和优化。
③单目摄像头变焦距问题。通常来讲,摄像头视角变窄(长焦距),则探测距离远;视角变宽(短焦距),则探测距离近。所以,针对不同距离范围内的目标探测需要不断变焦以保证测距精度,然而,目前市场上的单目摄像头焦距都是固定的。
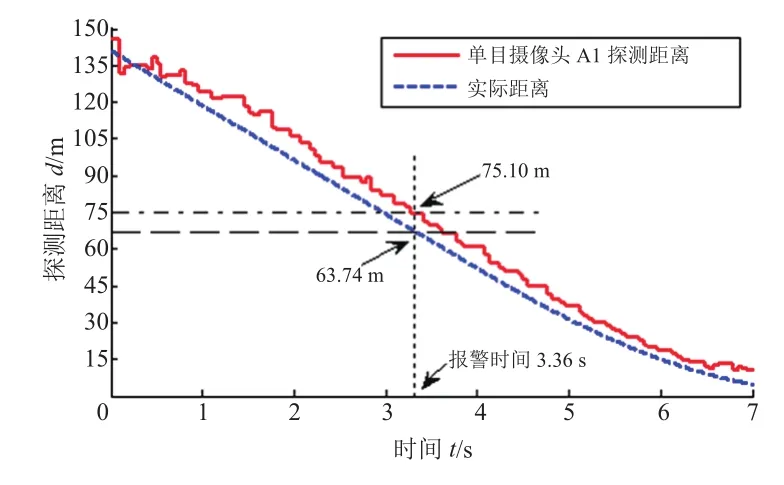
图6 单目摄像头A1测距精度对比曲线
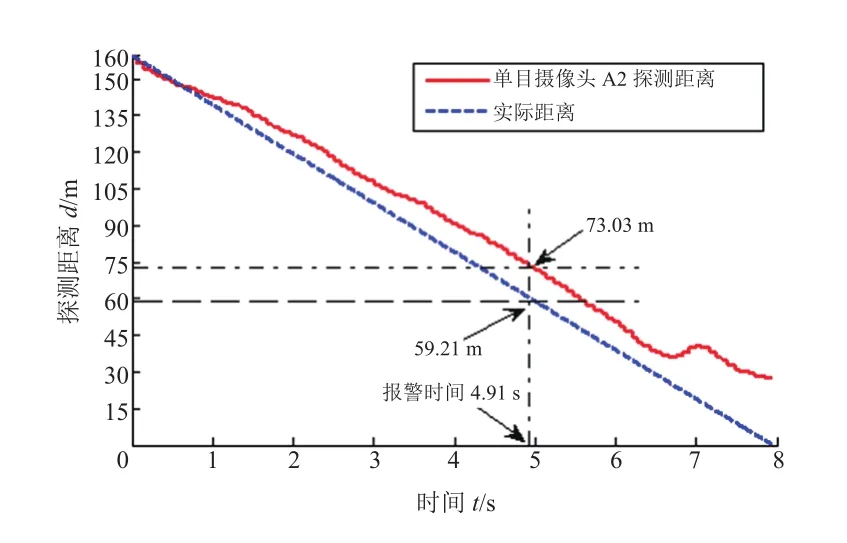
图7 单目摄像头A2测距精度对比曲线
2.4.2 基于毫米波雷达方案
(1)两种毫米波雷达测距方式说明:国外毫米波雷达B1和国内毫米波雷达B2均采用调频连续波(FMCW)测距方式。
(2)测试结果如图8和图9所示。
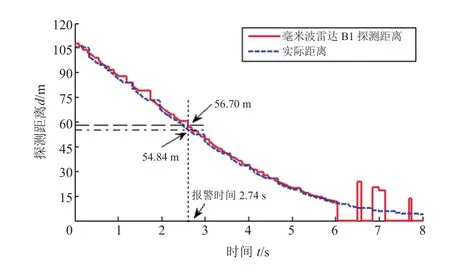
图8 毫米波雷达B1测距精度对比曲线
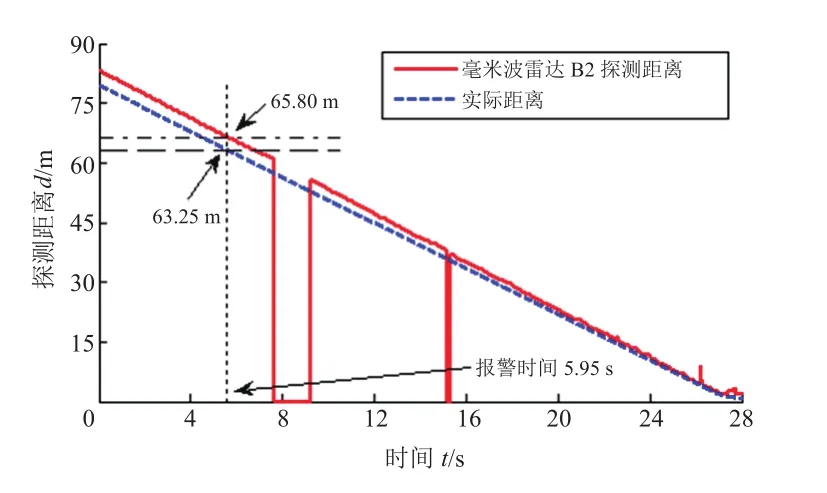
图9 毫米波雷达B2测距精度对比曲线
由图可知,基于毫米波雷达B1(国外产)和B2(国内产)的FCWs报警距离相对误差较小:σA1=3.39%(1.86 m),σA2=4.03%(2.55 m)。由此可见,进口毫米波雷达测距精度均较高,满足法规标准要求。但相较国外进口毫米波雷达,国产毫米波雷达测距性能较差,会出现“丢目标”的情况,造成系统“失明”。究其原因,毫米波雷达国产化进程滞后,雷达芯片是关键制约因素。
需要指出的是,受制于知识产权与供应链等诸多因素,英飞凌、飞思卡尔等国际Tier 1芯片供应商并没有完全对中国放开77 GHz雷达芯片的供应,这直接导致国内77 GHz毫米波雷达的研发受到很大程度的制约,进展较为缓慢。
2.4.3 基于毫米波雷达+摄像头信息融合方案
(1)方案说明:采用“摄像头主要负责目标外观锁定,毫米波雷达主要负责测距”工作模式。测距过程:先通过视觉和雷达同时测量距离,然后结合两者的测定距离来判断有没有误识别,甄选出有威胁的目标障碍物,最后以毫米波雷达所测距离为实际测量距离。
(2)测试结果分析。
由图10可知,基于毫米波雷达(国外产77 GHz)+摄像头信息融合方案的FCWs报警距离相对误差较小:σC=2.72%(1.75 m)。由此可见,与前两种传感方案相比,毫米波雷达+摄像头信息融合方案测距精度很高,也满足法规标准要求。
显然,与单目视觉或单毫米波雷达方案相比,两者融合方案在系统分辨能力、数据可信度、系统鲁棒性和稳定性等方面更有优势。
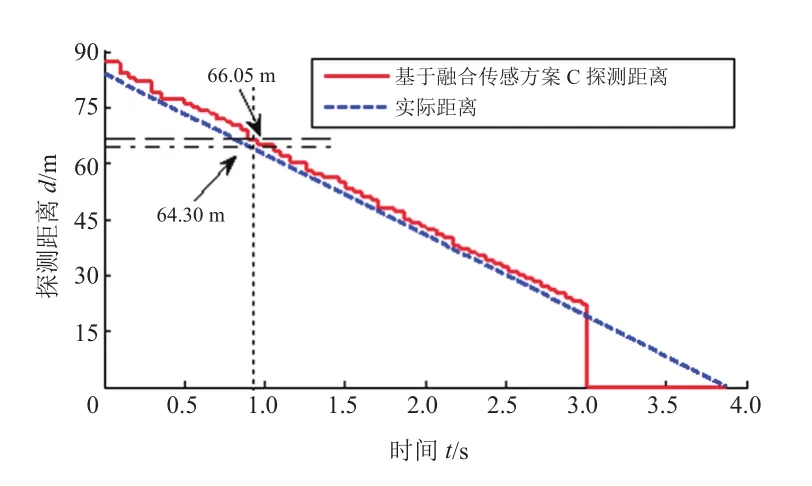
图10 基于融合传感方案C测距精度对比曲线
2.5 汽车FCWs测距精度评价问题分析及建议
(1)由于基于视觉测距原理“瓶颈”的限制,其测距精度根本达不到JT/T 883—2014标准的要求,部分产品能够满足GB/T 33577—2017的要求。建议根据FCWs传感方案的不同,对应调整标准中的测距精度要求,同时,针对基于视觉的FCWs供应商需不断优化测距算法以提升系统测距精度与可靠性。
(2)FCWs测距精度测试方法选择问题:目前标准只明确规定了一种试验方法,即前方目标车辆静止,测试车辆以72 km/h的速度接近。该测试方法未必能有效评价传感器测距精度,可考虑增加测试方法以模拟实际行驶工况,如增加前方目标车辆匀速或减速行驶工况。
(3)FCWs测距精度评价指标问题:标准GB/T 33577—2017和JT/T 883—2014中对测距精度要求一致性存在差别,即“测距误差”的要求(±1 m或±2 m)明显高于“测距相对误差”(±5%或±15%)。比如,单目摄像头A1测试结果为11.52%(7.76 m),以测距误差7.76 m作为评价指标,则不满足;相反,以测距相对误差11.52%作为评价指标,则满足要求。鉴于此,希望修订标准中的评价指标,形成统一的评判标准。
3 结论
本文在分析FCWs传感方案测距原理的基础之上,依据交通行业标准JT/T 883—2014及国标GB/T 33577—2017,针对某乘用车匹配的不同FCWs传感方案的测距精度进行了测试与评价。测试结果表明,毫米波雷达与摄像头信息融合方案的测距精度最优,同时指出了当前在汽车FCWs距离精度测评方面存在的一些问题并提出了相关可行性建议。
