新型陆空两栖平台技术发展与趋势
2019-04-08张佳林熊大顺毛子夏王冉婷
张佳林,熊大顺,毛子夏,刘 琦,王冉婷
(北京航天发射技术研究所,北京 100076)
陆空两栖平台,又称为“飞行汽车”,是一种既可以在地面行驶又可在空中飞行的新型机动工具,兼具车辆与飞行器的复合机动优势,国内外军事和民用领域都在进行概念研究。自1917年“飞行汽车之父”美国的格伦•柯蒂斯第一次展示了这种新型交通工具(他命名为Autoplane)之后,涌现出一些早期的设计者和产品,包括美国沃尔多•沃特曼设计的Arrowbile、罗伯特•富尔顿设计的可拆卸式模块化平台Airphibian和莫尔•泰勒研发的最接近现代设计理念的Aerocar等[1]。
到20世纪90年代至21世纪初,陆空两栖平台已由最初的个人梦想家的小范围实践,发展到专业的科研机构和汽车公司参与研发。这一时期的代表性产品包括荷兰约翰公司研发的PAL-V系列旋翼式三轮飞行汽车,美国Terrafugia公司研发的Transition,以色列城市航空公司和美国德事隆贝尔直升机公司联手研制的垂直起降的X-Hawk,美国DAPRA联合洛克希德•马丁公司研制的军用飞行吉普车“飞行悍马”,加利福尼亚先进战略ATI公司研发的飞行卡车“黑骑士”等[2]。民用陆空两栖平台主要以解决城市交通拥堵为目的,而军用平台具备军事巡逻、物资运输、伤病员转运等更多功能用途。
近些年,随着互联网、智能化、自动驾驶等新兴科技的发展,互联网企业与汽车界的交融越来越紧密,越来越多的互联网企业将目光投入到陆空两栖平台这个潜力领域[3],再加上一些其它企业的跨界融合,陆空两栖平台行业呈现出新的面貌,涌现了更多概念产品,本文将对其最新型产品予以介绍。
1 最新发展现状
1.1 洛马公司的AREs
美国洛克希德•马丁公司正在研发在一种“空中可重构嵌入系统”(Aerial Reconfigurable Embedded system,AREs),以实现运输军用物资、士兵和其它重要的军用载荷到道路崎岖和危险的区域[4]。这是一款新型垂直起降型无人平台,它的任务舱与飞行器是完全独立的,任务舱可以是多种类型的普通车辆,使用双涵道风扇作为动力的飞行器可以根据任务需要与不同任务舱组合,任务完成后飞行器与任务舱自行分离飞走,实现模块化的系统载荷重构,如图1所示。
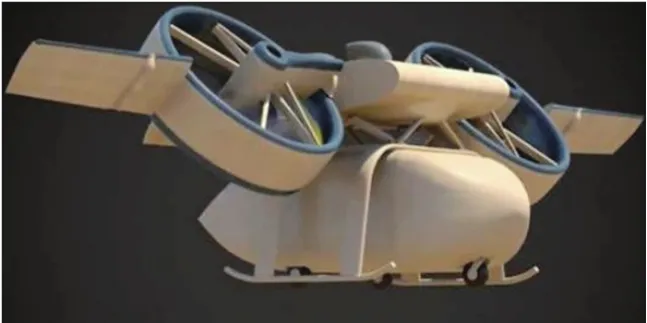
图1 洛马的空中可重构嵌入系统AREs
AREs拥有动力系统、燃油系统、数字飞控系统以及远程指挥和控制界面,双倾斜涵道风扇提供有效的悬停和着陆能力,并可快速变形为高速巡航飞行状态。AREs最大的亮点在于无人化和模块化的设计思想,飞行系统和任务系统相互分解各为一个单一的系统,通过更改主要的任务舱来实现不同任务。飞行系统为无人化,操控人员只需要预装在智能设备上的控制终端就可以控制飞行[5]。
AREs采用两个涡轴发动机分别驱动两个旋转涵道螺旋桨为动力源,涵道桨直径约为2.3 m,完全展开后系统体积为3 m×3 m×13 m。巡航速度在240~280 km/h,载重能力约为1 360 kg。
1.2 美国Terrafugia公司的TF-X
美国的Terrafugia公司曾于2009年首次试飞成功了一款折叠翼式飞行汽车Transition,并已获得美国交通安全局的上路许可,允许投入商业化生产,但Transition的缺点是需要足够的展开空间和起降距离才能正常起飞降落,城市使用不便[6]。
为解决这个问题,Terrafugia公司近年来正在研发一款能够垂直起降的概念车TF-X,并计划在2023~2025年实现首飞。TF-X为四座,在起飞阶段依靠两个螺旋桨来提供升力和部分前进的动力。当获得足够的高度后,这两个螺旋桨会收拢起来,只依靠车尾的涵道式风扇推进。TF-X是一款混合动力飞行汽车,它的两个螺旋浆依靠两台441 kW的电动机驱动,车上配有一台221 kW的汽油机给电池充电,同时驱动涵道风扇转动[7]。
TF-X在空中续航里程将达到800 km,空中极速320 km/h,降落时只需要30 m2的场地。它还配备了一系列智能系统,可以无人驾驶和飞行,只要告诉它目的地就可以把乘客送达,最大程度地降低了使用门槛。如图2所示。

图2 Terrafugia公司的TF-X
2017年12月浙江吉利控股集团有限公司完成了对Terrafugia公司的收购,宣称将于3年内实现量产,并计划在中国建厂。
1.3 Zee.Aero公司的多旋翼汽车
2010年,谷歌创始人拉里•佩奇个人创立了Zee.Aero和Kitty Hawk两家公司,专门开发飞行汽车。Zee.Aero主要研发新型航空器,采用类似直升机的旋翼飞行方式,由电动机驱动飞行;Kitty Hawk公司主要开发飞行汽车,从汽车平台上进行研发。整个项目由“无人车之父”、谷歌自动驾驶部门创始人赛巴斯蒂安•斯隆负责[8]。
Zee.Aero公司有电动滑翔机、旋翼机和传统的固定翼产品,2018年3月首款产品进行了试飞,如图3所示。拉里•佩奇称之为一种“革新的运输形式”。但他对这项投资刻意保持低调,处于高度保密状态,可查的资料很少,首台车的试飞就在非常隐秘的环境下进行。
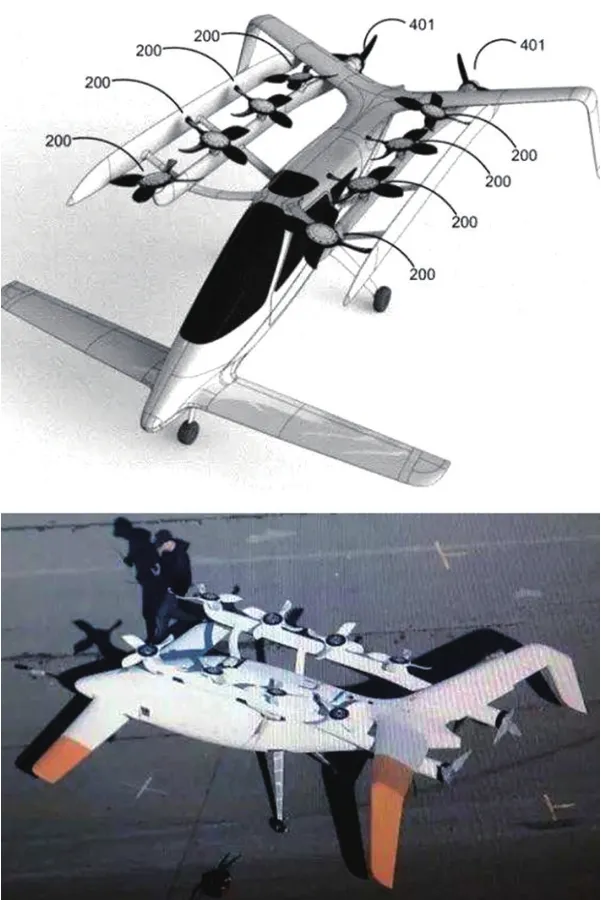
图3 Zee.Aero公司的多旋翼飞行汽车
该车是一款可垂直起降的飞行汽车,从侧面看像大白鲨,可以乘坐2人,顶部有两排共8组旋翼负责垂直起降,后面有两组旋翼负责推进,全部由电驱动。机身前部翼展3 m左右,整车长度约4.5~6 m,整备质量约100 kg,速度最高可达40 km/h,续航里程约100 km。飞机的旋翼可以折叠收起,从而停泊至普通汽车的停车位。
1.4 Uber的飞行出租车UberAir
2017年11月,Uber与NAsA计划合作打造一种全自动、纯电动、低噪音、零排放、体型小巧、运营成本低、采用分布电系统并能够垂直起降的电动飞行出租车。这款出租车将包含4个座位,飞行速度达320 km/h。充分利用Uber正在研发的无人驾驶技术,处在繁忙都市中的消费者通过手机APP就可以在楼顶呼叫一辆飞行出租车。同时利用人工智能算法开发一套空中交通管制的系统,自动将用户送至目的地[9]。
早前UberAir曝光了该飞行出租车的外形,机上配置4个水平旋翼,着陆时折叠收起,尾部还有一个旋翼来提供推力,以保证若一个旋翼出现故障,其它旋翼也能令飞行出租车安全着陆。UberAir还有固定的机翼来帮助滑翔,使之更高效,速度更快。分布式电动推进器使该车最高飞行速度能达到161 km/h,飞行高度800~1 000 m,只需5 min就能完成充电,续航里程96 km[10],如图4所示。
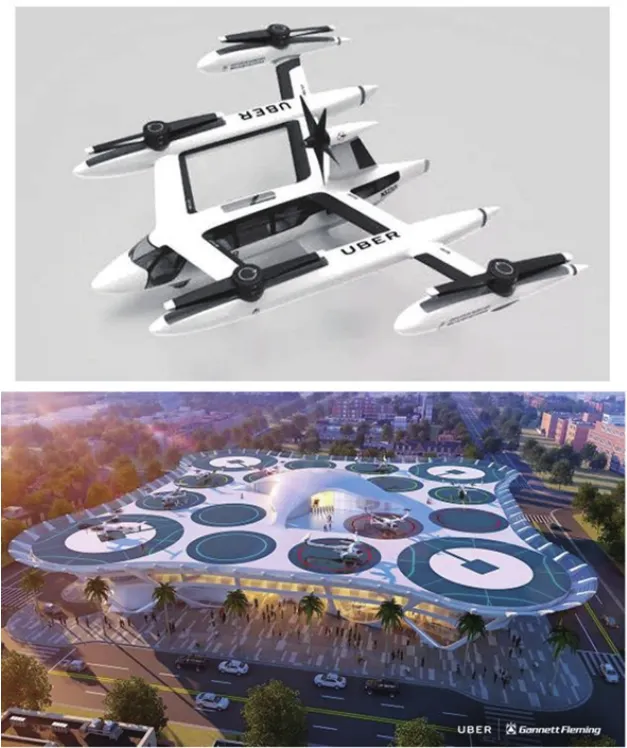
图4 UberAir和skyports概念设计图
同时Uber还计划在楼顶建造停机坪,命名为skyports。2018年5月,在洛杉矶举行的第2届年度Elevate会议上,Uber联合6家建筑设计单位展示了skyports的6款概念设计图。skyports的设计目标是需要在12 141 m2的占地面积内每小时运输超过4 000名乘客,并符合噪音和环保要求。此外还需要电动飞行器能够在旅程中充电,同时要对附近社区的影响达到最小化。
此外,Uber还在巴黎创建了研发中心,用于构建支撑飞行出租车系统所需的基础设施架构,包括基于机器学习的运输需求建模、高密度的低空空中交通管理模拟、空域运输自治方案、自动飞行、能源储存、智能电网、实时通信网络、充电系统等。Uber计划于2024年前将飞行出租车投入商业运营。
1.5 欧洲空客公司的Pop.Up
欧洲的航空业巨头空中客车公司Airbus,在2017年的日内瓦车展上,发布了一款创意智能概念车“Pop.Up”。这套交通系统由车辆底盘、乘员胶囊、无人机3个模块组成,皆可独立分离,也可分别适配,是一款解决城市交通拥堵、提高人们出行效率的模块化、全电动、零排放概念车[11],如图5所示。
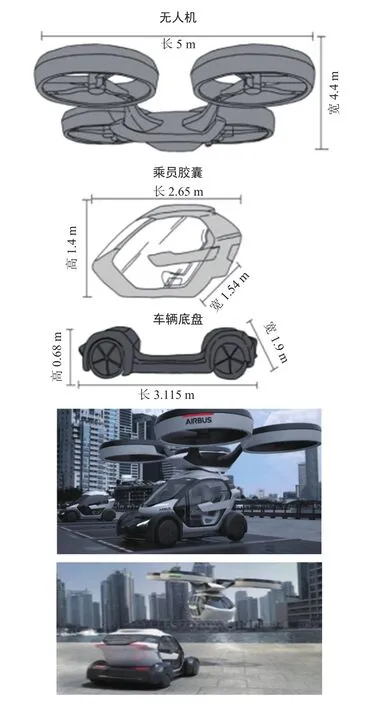
图5 空客公司的Pop.Up
Pop.Up电动车结合了小型两座地面车辆与垂直起降空中车辆的双重灵活性,胶囊座舱是整套系统的核心,可以乘坐两人,空载质量200 kg,采用碳纤维复合材料制成的单层茧壳结构。胶囊座舱尺寸长×宽×高为2.65 m×1.54 m×1.41 m,底盘尺寸为3.115 m×1.9 m×0.68 m,无人机尺寸为5 m×4.4 m×0.5 m。
无人机部分由4套电驱动大功率涵道风扇组成,同样由碳纤维材料制成,起飞质量不小于500 kg。胶囊座舱既可以和无人机连接,变成垂直起降载人飞机,又可以和车辆底盘连接,变成电动汽车(续航130 km,最高车速100 km/h),在城市中出行十分便利。
这款概念车旨在让乘客享受从移动APP就可以随意调用的路面-交通混合飞行机车,以及通过APP来计划和预订旅程的运营平台,包括了存储每一个驾驶员信息的数据库、路网和交通信息的人工智能平台,还可以选择最佳行驶路线。该系统通过“全虚拟环境”确保整个行程中的操作安全。
1.6 可折叠翼式AeroMobil
斯洛伐克公司AeroMobil生产的同名飞行汽车,完全使用现有汽车和飞机基础设施。在处于汽车模式时,AeroMobil可停入正常停车位,使用加油站提供的普通燃料。进入飞行模式时,汽车双翼打开,展开为固定翼飞机。Aeromobil既时尚舒适又超轻,是跑车性能与“超轻质量”的完美结合[12]。
AeroMobil动力来源于配备的Rotax 912 四缸自然吸气冷凝式汽油发动机,发动机具体功率未知。该发动机能使该车在汽车形态下达到161 km/h的最高速度,处于飞机形态时,其最高速度可达200 km/h。汽车形态下其耗油量为8 L/100 km,而飞机形态下为15 L/h[13]。
2017年4月在摩纳哥展会上AeroMobil公司展示了其第4代产品,如图6所示。也是第一款设计用来同时满足欧洲和美国对公路汽车和飞机规定的飞行汽车,并宣布开始全力生产首批500辆(架),计划于2020年开始交付。

图6 斯洛伐克的AeroMobil
该车的车身、折叠式机翼由高强度,轻质的碳纤维制成,不能垂直起降。该车变形耗时不超过3 min,从汽车转化为飞行模式时,车身将展开成机翼,将轮子收入机身,然后将可变螺距推进器变到身后,变速器可将原先用于驱动车轮的定制款2.0 L涡轮增压发动机的能量传递到推进器上,通过机翼产生升力[14]。AeroMobil的总长约6 m,翼展约8.2 m, 整备质量450 kg,最大安全飞行载重量为240 kg,足够两名成年人拖带着行李去休闲。
但由于不具备自动驾驶能力,需要驾驶员同时具备飞行员执照和驾驶执照才能上路,也不能垂直起降,需要在地面展开固定翼,在使用中存在不便。
1.7 俄罗斯的两轮飞行摩托
2017年2月,俄罗斯制造商霍弗瑟夫公司发布了一款消费级飞行摩托scorpion-3“蝎子-3”引发关注。scorpion-3融合常规摩托设计和四旋翼无人机技术,用碳纤维机构减轻质量,较之前的铝制结构减重2倍。单个发动机功率33 kW,总推力364 kg,可承载约133 kg,速度最高48 km/h[15]。
采用特殊的LiNiMnCoO2电池,拥有12.3 kWh的容量,2.5 h完成充电,飞行高度可达10 m,在空中载人连续飞行时间为27 min,配备汽油发动机的混合动力版续航可延长至1 h。领先的逻辑元件和无源专用编程计算机等定制软件可让飞行摩托在高度和速度控制方面达到非常平稳的水平,具备悬停和飞行功能,如图7所示。
霍弗瑟夫公司还将其改进版推荐给迪拜的警察部门,用于城市警务执勤,让迪拜警方能够以最快的速度抵达现场,疏导交通,处理突发事件等。该飞天警车仍是摩托车和四旋翼无人机的主体方案,可承载300 kg,最高速度70 km/h,采用燃油和电驱动,续航时间最高可达1 h。可以载人飞行,也可无人飞行,最高可升至6 000 m左右。

图7 俄罗斯的两轮飞行摩托scorpion-3
1.8 瑞典的Linnaeus
瑞典工业设计师Dawid Dawod设计了一款让人耳目一新的陆空两栖概念无人平台Linnaeus,它的最大亮点是将轮胎和风扇复合为一体,如图8所示。在陆地行驶时宽大的履带能够带动它在土壤和石头路面上畅通无阻;当需要飞行时,内置在履带内、动力强劲的涵道风扇能够向上翻折,产生升力带动整机腾空而起。它的目的是为了帮助人们监督和检测公共环境中植物的健康状况和是否需要灌溉。它使用无线远程控制,并在平台上安装了摄像机,能够将采集的数据随时传回监控端[16]。
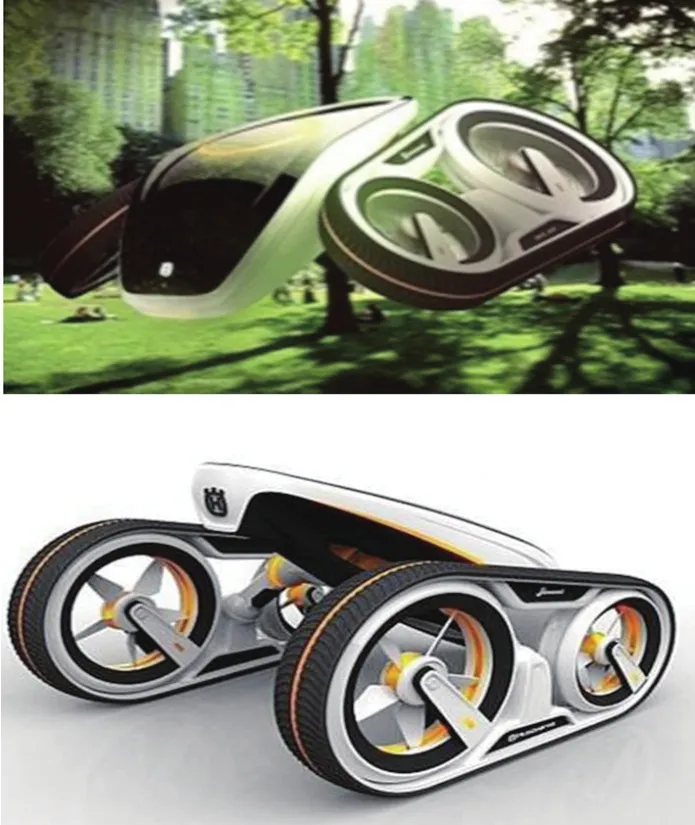
图8 瑞典的Linnaeus概念平台
1.9 深圳哈威科技的飞行摩托
2017年12月,深圳哈威科技团队推出了一款两栖微型个人飞行器HOVERsTAR H1,如图9所示。它有3个轮子,下部类似底盘,飞行翼可以折叠和展开,全车依靠电力驱动。设计目的也是为了解决城市的交通拥堵问题[17]。

图9 哈威科技的飞行摩托
该飞行摩托可以手动控制,也可自动飞行,垂直起降,尺寸是2 m×1.8 m,最大起飞质量260 kg,有效载荷75 kg,最大飞行高度10 m左右。据称该车在电池管理系统方面取得了重大突破,充满电后可以在地上行驶50 km,低空飞行10 km,陆地行驶最高速度达80 km/h。
1.10 关键特性及技术参数汇总
对上述国内外新型陆空两栖平台的功能特点、技术方案、关键指标、应用情况等进行汇总梳理,见表1。
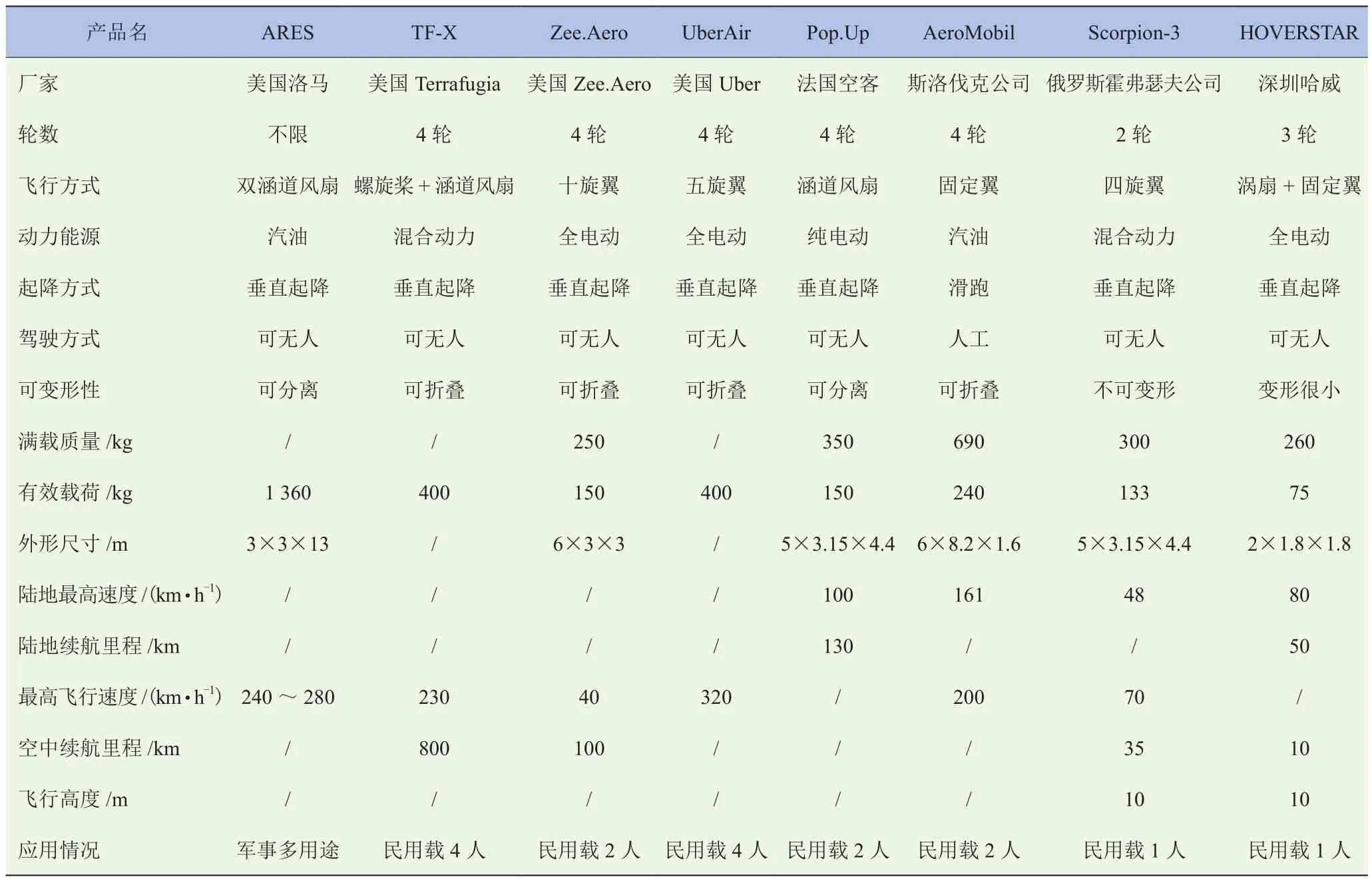
表1 关键特性及技术参数汇总表
2 关键技术和构型
2.1 关键技术和难点
由上文最新的技术发展调研,提炼分析出以下陆空两栖平台的关键技术和难点。
(1)两栖构型总体技术:包括两栖构型总体方案、舱身一体化赋型、轻量化技术、高密度动力源、能量储存与管理等。
(2)两栖功能快速转换技术:包括结构机构快速转换、动力能源切换、传动系统转换、操控系统转换等,使两栖功能转换时衔接顺畅快速。
(3)飞行器总体设计技术:包括空气动力学技术、飞行装置设计、飞行动力匹配设计、飞行动力/运动/姿态控制、空中逃逸技术等。
(4)智能化技术:随着智能化、无人化技术的发展,两栖平台对内外部环境感知、轨迹路径自主规划、障碍物检测与自主避障、陆空智能辅助驾驶、空域运输自治管理、多平台协同、智能网联等技术的研究也在深化。
2.2 构型及组成
根据国内外情况调研,按照功能原理模块组成,归纳提出陆空两栖平台构型主要可划分为3部分:载荷舱、底盘部分和飞行部分。这3个部分可以是一体化合成的,也可以是模块化组合而成的[4]。
载荷舱是陆空两栖平台的任务载体,平台的用途决定了载荷舱的设计。包括载人舱、运输货物舱、侦察巡逻舱、攻击作战舱、其它用途舱等。载荷舱的设计、组成根据其用途不同而存在差异。
底盘部分主要完成在陆地上的行驶功能,主要由动力系统、传动系统、行驶系统、转向系统、制动系统、控制系统等部分组成。
飞行部分主要由推进装置、机翼、起落装置、操控系统、动力装置等组成。对于推进装置,陆空两栖平台相对大型军民用飞机来讲一般规模体积较小,很少使用涡轮、涡扇、冲压等航空发动机,大多是螺旋桨、旋翼、固定翼、涵道风扇等中小型推进装置[5]。
还有其它一些装置,如两栖转换装置、通信设备、导航设备、环境感知设备、隐身防护设备等,根据平台功能需求设置。
3 分类研究
陆空两栖平台的类型很多,可以从不同的维度对其进行分类。本文提出从平台用途、两栖功能实现形式、飞行形式、车辆形式、动力能源这5个维度对其进行分类研究。
3.1 从平台用途分类
平台的用途、应用方式决定了陆空两栖平台的整体设计方案,分类如图10所示。
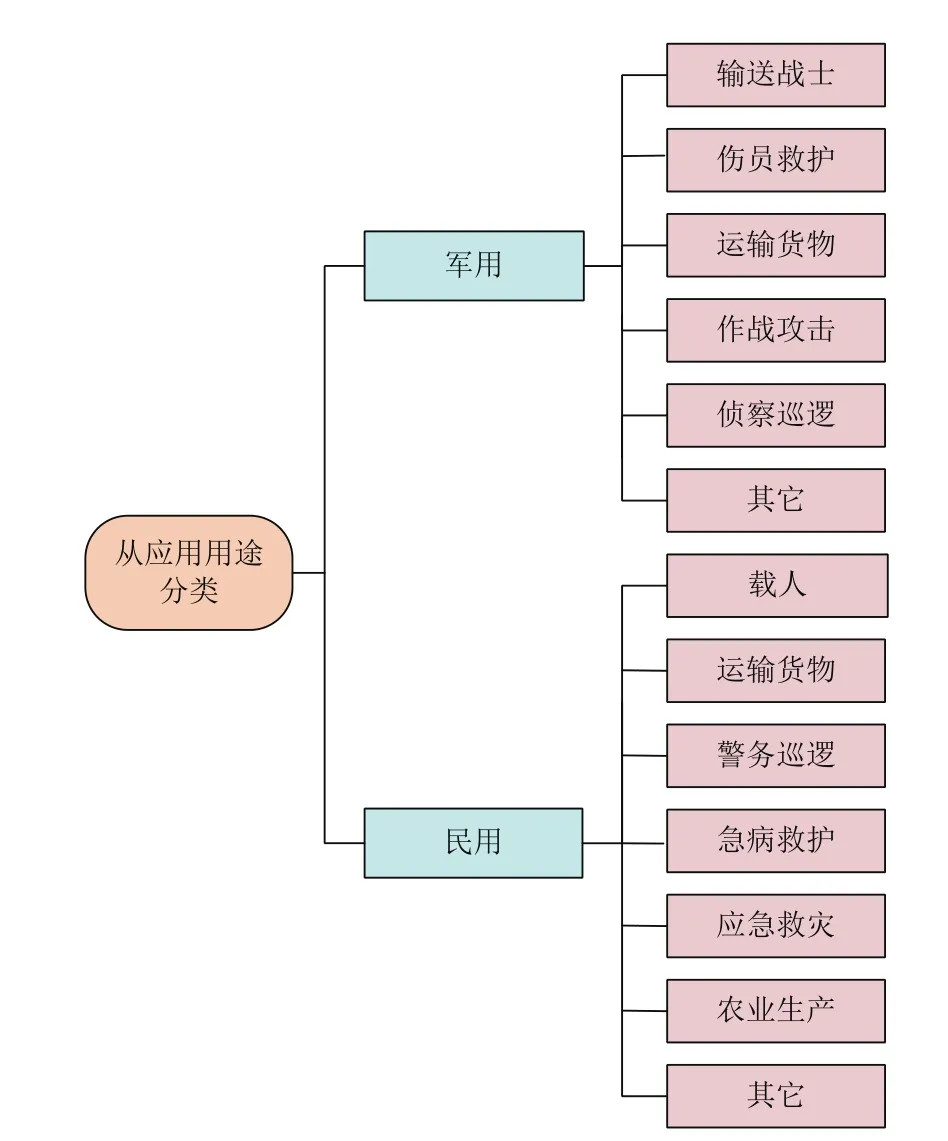
图10 从陆空两栖平台应用用途分类
3.2 从两栖功能实现形式分类
从两栖功能实现方式分类,根据平台是否可以折叠、变形、两栖功能是否可以模块化分离、折叠变形的实现形式等,对两栖平台进行分类,如图11所示。
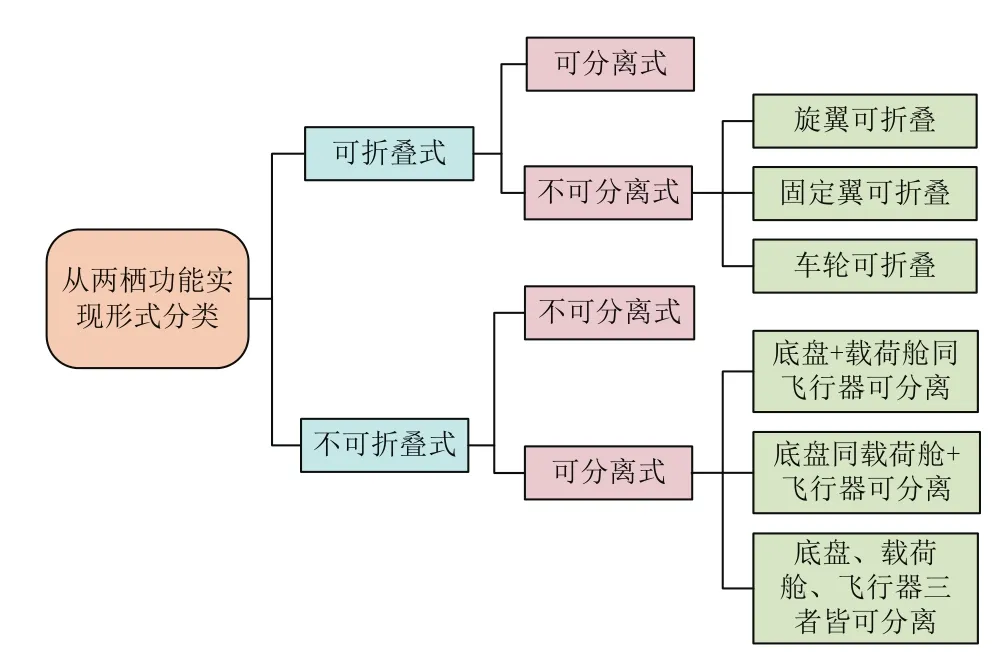
图11 从两栖功能实现形式分类
3.3 从飞行方式分类
由上文所述,两栖平台一般规模较小,大多使用螺旋桨、旋翼、固定翼、涵道风扇等作为飞行推进装置,还有少量依靠磁悬浮原理的概念方案。一般来讲,以螺旋桨、旋翼、涵道风扇作为主要升力的飞行器,可以实现垂直起降;而使用固定翼作为主要升力的飞行器,需要滑跑一定距离才能起降。从飞行方式来对平台进行分类,如图12所示。
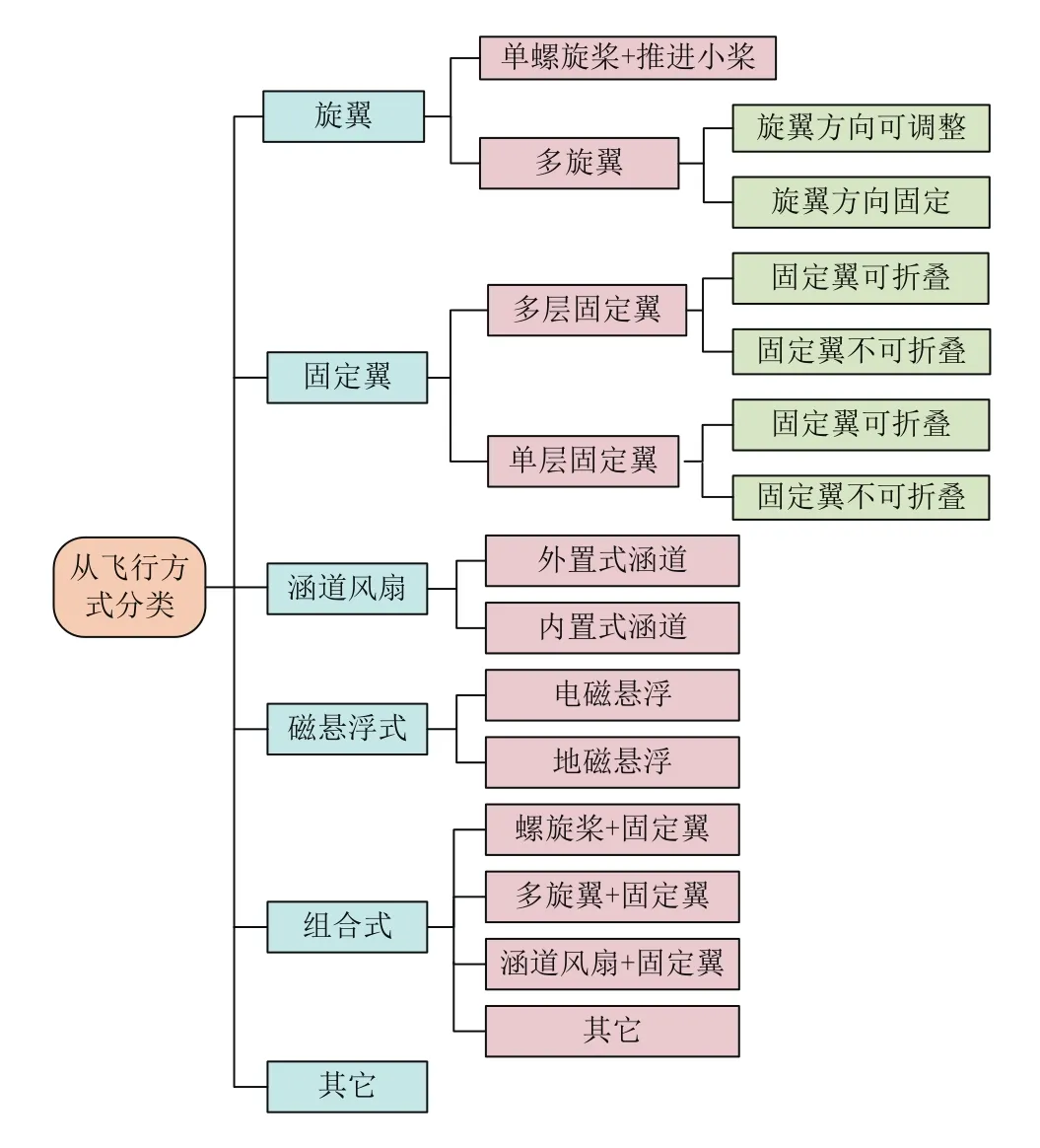
图12 从飞行方式分类
3.4 从车辆形式分类
根据车辆底盘形式来对两栖平台进行分类,包括单轮、两轮、3轮、4轮、其它等,如图13所示。
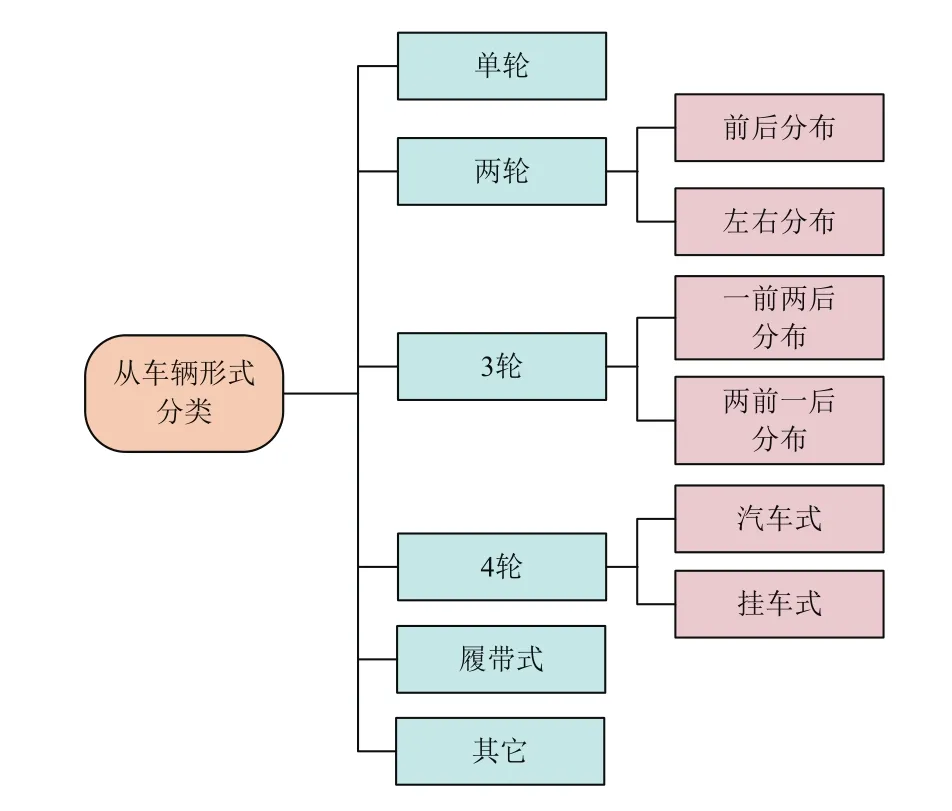
图13 从车辆形式分类
3.5 从动力能源分类
根据平台使用的动力能源是燃油、纯电动、新型能源还是混合动力,将这些平台进行分类,如图14所示。
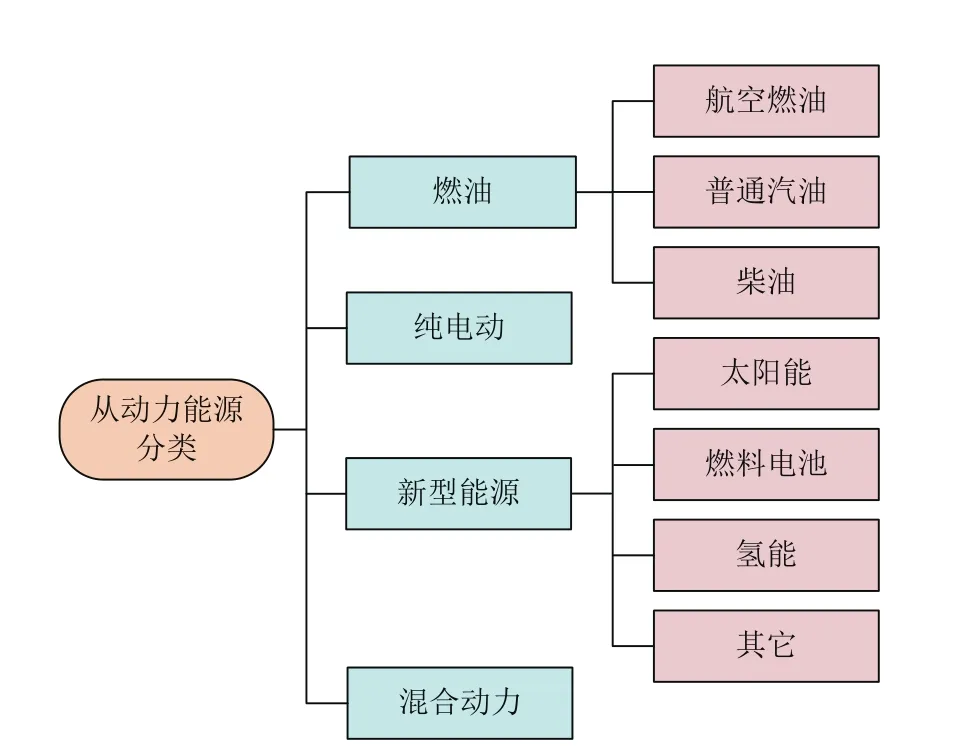
图14 从动力能源分类
4 趋势及展望
根据上文所述,陆空两栖平台领域呈现的新发展趋势为:
(1)从平台功能应用来看,解决城市交通拥堵仍是最主要的设计目标,但应用方式正在逐渐多样化,发展出了应急救灾、战场巡逻、农业生产、武器攻击等多种使用方式,军用、民用的应用都在扩大[18]。
(2)从参与研发的厂家机构来看,已经由最初的个人梦想家,发展到科研机构、汽车公司,再到当前互联网企业、航空企业、军工巨头的加入,参与研发的机构在近年来呈现突增和多样化趋势。
(3)从两栖功能实现方式来讲,可垂直起降、可折叠、可模块化组合的技术方案越来越受到重视[19],这也是由两栖平台的功能需求和定位特点所决定的。
(4)从自主能力来看,智能化、无人化、自主能力在不断提升,通过引入无人驾驶、智能辅助驾驶、自主导航等先进技术,对驾驶人员的陆空操作能力需求在逐渐降低。
(5)从能源动力来看,高功率密度的新型动力正在成为研发热点,逐渐取代燃油动力和混合动力,这也和目前普通汽车行业的发展趋势相吻合[20]。
综上所述,陆空两栖平台最新的发展趋势可归纳为:(1)功能应用逐渐扩展;(2)可垂直起降;(3)可折叠;(4)通用化,可模块化组合和分离;(5)智能化;(6)开放式架构;(7)多任务执行能力;(8)长航时;(9)全天候、多地域环境适应能力;(10)高功率密度的新型动力。
