仓储搬运机器人在汽车工厂一次物流领域的应用
2019-04-03葛世恭邹康宇
葛世恭,邹康宇
(风神物流有限公司 物流技术部,广东 广州 510800)
1 引言
随着中国汽车行业竞争的加剧,汽车销售价格降低,汽车制造企业向汽车供应链上下游环节转移成本压力已成为不可避免的趋势。而经济水平的发展带动了人力成本的上涨,作为劳动密集型的汽车物流企业面临招工难、利润低的问题。另一方面,物流自动化装备发展日新月异,在物流行业得到广泛关注,尤其是电商物流因其作业模式具备自动化设备导入优势,现场自动化水平走在了物流行业前列,为汽车物流提供了借鉴。
2012年,亚马逊斥资7.75亿美元收购Kiva systems公司的机器人项目,在作业现场导入KIVA机器人,提高近50%的分拣处理能力,在业内引起轰动。伴随着国内电商的飞速发展,近年来电商物流KIVA机器人需求日渐增多,带动了设备市场的发展,国内海康威视、怡丰、快仓等自动化设备公司仿照KIVA机器人,开发了自己的仓储搬运机器人产品,并在天猫、京东等公司仓库得以应用,取得了良好反响。目前,磁导航AGV在汽车厂已得到广泛应用,尤其是二次物流环节,AGV[1-5]与辅助机械机构配合完成物料的上线,自动化程度较高。但一次物流因为作业环境复杂,自动化程度仍然较低,且磁导航AGV磁条维护成本较高,柔性较差。相比一般磁导航AGV,仓储搬运机器人体积小、行动灵活,在窄巷道内应用优势明显。目前,国内一些汽车物流企业已着手在作业现场导入仓储搬运机器人。
本文基于汽车物流企业工厂物流作业特性以及仓储搬运机器人的特点,对仓储搬运机器人在汽车工厂一次物流作业现场的应用模式进行了探讨。
2 汽车工厂一次物流流程
在零部件物流供应链中,汽车零部件在供应商工厂内进行生产,经过前端和末端物流集配中心后进入汽车装配厂,进入汽车工厂之后的流程如图1所示。卡车入厂后,在待机场等待指示,根据指示进入卸货雨棚,依次经过叉车卸货入库、集配、牵引车供给、返空、容器整理、容器装车等环节。
分析设备的特点可以发现,KIVA主要应用于部品的集配、供给以及返空环节,用以取代人工拣选以及牵引车转运与投料作业。
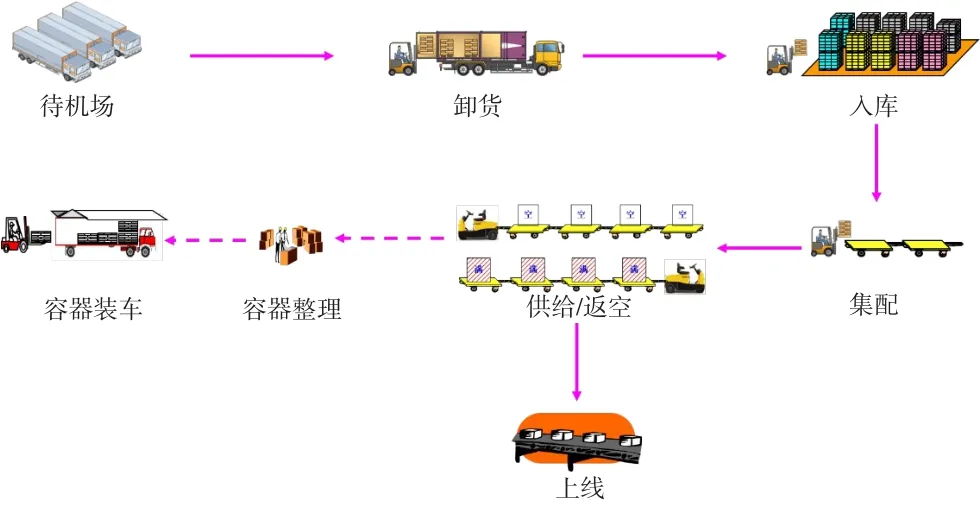
图1 汽车工厂一次物流作业流程示意图
3 “货到人”模式在大件集配拣选作业中的应用
汽车零部件种类多,包装形态各异,为方便区分,将零部件按照包装形态分为大件和小件,大件为铁料架包装,小件为胶箱、塑脂箱包装。小件集配拣选人员作业时间主要集中在搬运和拣选,行走时间较短,“货到人”的作业模式经济性较差;多数大件集配作业采用整托集配方式,不宜导入“货到人”模式;少数大件集配采用仓库排序至专用棚车的方式,由于大件部品体积较大,平铺面积较大,因此作业人员走动距离较远,在作业时间中行走时间所占比例较大,采用“货到人”模式经济效益较好。此外,这种作业场景与目前大多数电商物流拣选场景类似,电商物流经验可供借鉴。
3.1 作业模式
“货到人”(Goods to person)拣选,即在物流拣选过程中,人不动,货物被自动输送到拣选人面前,供人拣选,与之相对的拣选方式是“人到货”(Person to goods)。“货到人”拣选有超过40年的发展历史,最早的“货到人”拣选是由自动化立体库完成的,托盘或料箱被自动输送到拣选工作站,剩余的部分仍然自动返回自动立体库中储存,如图2所示。

图2“人到货”与“货到人”模式示意图
图2 -a中,在“人到货”模式中,集配拣选人员手推棚车按照零件排序清单逐项来到各个指定库位进行拣选,当订单密度小时,人员需要频繁地在库位之间走动,导致作业充实度较高。相比之下,如图2-b所示,集配拣选人员站在指定地点,通过扫描清单或者物料呼叫等方式向仓储搬运机器人的调度系统(即RCS)传送需求信息;RCS根据需求信息向仓储搬运机器人下达任务指令;仓储搬运机器人按照指令潜入到指定库位台车底部,将台车及其上方容器顶起,转运到集配拣选人员附近。按照这种方式,人员只需在小范围走动即可,极大程度地减少了行走时间。
针对“货到人”模式,可采用如下方法估算模式导入后的效益。
其中,ΔP表示递减人员/工时,P0表示目标岗位导入设备前人员配置/工时,T0表示集配拣选人员每作业班次时间内行走时间,T表示集配拣选人员每作业班次时间内工作时间。比如,某一场景中,单班配置3名集配拣选人员,在每作业班次内平均每人工作时间360min,其中行走时间150min,即P0=3,T0=150,T=360,则:
经过计算,在以上条件下,导入仓储搬运机器人可递减人员1.25人/班,节约人工工时450min。
3.2 信息传递
“货到人”的模式技术成熟,国内绝大多数设备厂家均可实现该模式的软件功能,该模式的一般系统逻辑如图3所示。
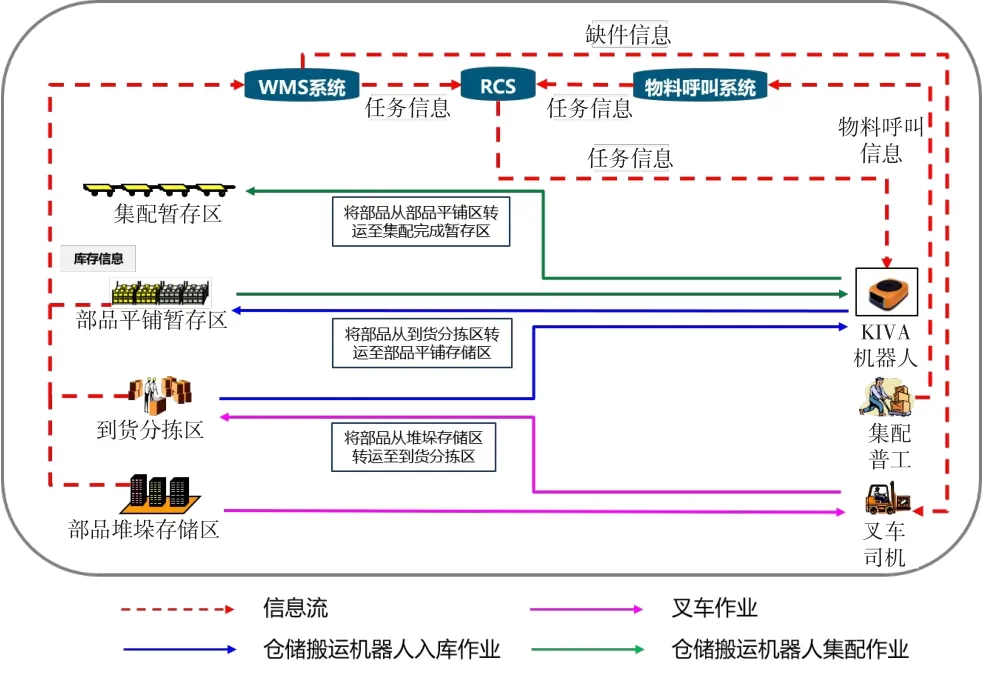
图3 集配拣选作业“货到人”信息传递示意图
集配作业:当集配拣选人员需要集配某种物料时,通过物料呼叫系统向设备调度系统(RCS)传递信息,仓储搬运机器人接受调度系统指令将所需物料整托转运到集配拣选人员附近,拣选完毕后将剩余物料送回库位,等待下一次任务。
入库作业:当存储区某库位缺件时,缺件信息自动传递到WMS系统,WMS系统将信息传递给叉车司机和RCS,叉车司机根据信息将所缺物料放到指定位置,仓储搬运机器人根据RCS指令将物料从指定位置转运至缺件库位。
4 KIVA在大件供给作业中的应用
在汽车工厂中,一次物流供给作业目前由人工牵引车完成,且供给人员在全部作业人员中比例较多,因此得到广泛关注。供给作业主要包括转运与投料两部分,国内少数汽车厂通过导入磁导航AGV取代转运作业,但投料作业尚未有较优的替代方案。
小件投料采用人工逐箱向料架/工作台投放的方式,不宜仓储搬运机器人的导入;大件投料采用整托物料台车置换的方式,可以导入仓储搬运机器人进行投料作业。
4.1 大件供给作业模式
4.1.1 线边料位摆放方式。小件投料采用人工逐箱向料架/工作台投放的方式,不宜仓储搬运机器人的导入;大件投料采用整托物料台车置换的方式,可以导入仓储搬运机器人进行投料作业。目前线边大件料位主要有3种摆放方式:左右料位、前后料位和单料位,具体见表1,每种摆放方式分别对应不同的自动化供给模式。

表1 线边料位摆放方式
4.1.2 具体作业模式分析。在汽车工厂总装车间内,最常见的料位摆放方式为前后料位。人工作业情况下,当前侧料位上物料用尽时,线边工人将后侧料位容器与前侧料位容器互换位置,保持前侧料位上有物料可用。如图4所示,当采用自动化供给时,采用仓储搬运机器人(KIVA)实现前后料位容器互换位置,并对后侧料位进行补料,作业流程如下:
(1)KIT工人通过呼叫装置同步发出置换信息和集配信息;
(2)控制系统调度KIVA执行置换任务,KIVA-1将外侧满容器拉出(如图5所示);
(3)KIVA-2将内侧空容器拉出;
(4)KIVA-2进行返空作业;
(5)KIVA-1将拉出的满容器拉回内侧,置换动作完成,等待下次任务;
(6)系统调度叉车和KIVA执行集配/供给任务,叉车卸空容器;
(7)叉车将满容器集配到KIVA-2的台车上;
(8)KIVA-2根据供给任务指示前往相应KIT工位;
(9)KIVA-2根据供给任务指示进行供给投料;
(10)供给任务完成后KIVA-2需要等待置换/供给任务的发出。
以上模式采用2台仓储搬运机器人联合作业的方式实现供给作业自动化,该模式也可通过1台仓储搬运机器人独立作业实现功能,如图6所示。
与前后料位相似,如图7所示,针对左右料位,可采用AGV接力供给、AGV空满置换等模式实现自动化供给,普通磁导航AGV即可满足功能要求,导入仓储搬运机器人可完成容器转向等功能,使该模式应用环境更为广泛。对于单料位,可采用在线边设置缓存的方式:仓储搬运机器人首先将部品容器从存储区转运至线边缓存区,再根据线边生产需要将所需部品从线边缓存区转运至线边工位。线边设置缓存的方式对于供给及时性要求高,目前应用较少。

图6 单台仓储搬运机器人独立作业

图7 左右料位:AGV接力供给和空满置换
4.2 信息传递
为了满足供给作业的及时性,仓储搬运机器人、叉车司机以及线边工人之间需要通过设备调度系统(RCS)、物料呼叫系统进行信息的传递,如图8所示。
4.3 Flexsim仿真
在项目运作过程中,各种因素处于不断变化中,借助仿真可以对全流程进行动态模拟和统计分析,进而对方案的技术可行性进行评估。下面以某仓储搬运机器人供给项目为例,采用Flexsim软件进行仿真建模。

图8 供给作业信息传递示意图

图9 某KIT集配区零件供给作业示意图
4.3.1 仿真背景。如图9所示,选取某KIT集配区29种零件供给作业为仿真对象,每种零件占据前后两个工位,初始状态全部零件满SNP,零件信息见表2。
4.3.2 仿真模型建立。借助Flexsim软件的AGV模块功能,将任务执行器代替KIVA的搬运作业,并通过任务分配器、交通管制及路径点属性逻辑设置,实现KIVA全部作业流程的方针,仿真模型整体逻辑如图10所示。
在实际生产作业中,零部件的消耗数量是动态的,在仿真模型中,借助零部件的P/C属性(单车用量×差异件比例)来代替各零部件的消耗速率,并通过处理器实现零部件按照准确速率消耗。而在KIVA置换作业环节,任务执行器与路径网络决策点属性设置KIVA的预置换台份及置换方式(1台KIVA单独置换与2台KIVA协同置换)。最后在模型建立后,通过Global Table(全局表)与Dashboard(统计图表)两大模块,针对整体模型各设备与作业环节相关数据进行统计与整理。模型整体运行如图11所示。
4.3.3 仿真结果分析。以仓储搬运机器人(KIVA)数量、生产节拍等参数为变量,统计缺件工位、最大响应时间等数据,见表3。
根据各变量条件下详细数据分析,得出模型各项参数变化趋势:
(1)缺件发生时间:缺件存在于整个作业过程中。

图10 仿真建模整体逻辑

表2 零件信息

图11 模型运行展示

表3 仿真数据汇总
(2)缺件工位数:在14-19波动,方案变化对数量无明显趋势。
(3)缺件次数及数量:随节拍↑,次数↑,数量↑;置换工作KIVA数↑,次数↑数量↑;同等KIVA数量下,预置换台份逐渐↑,缺件情况呈现先↓后↑的情况。不同KIVA数的最少缺件预置换台份不一。
(4)响应均值及响应率:节拍↑,时长↑,响应率↓;预置换台份↑,时长↑,响应率↓;导致单次缺件数量增多。
(5)最大响应时长:节拍↑,最大时长↑,预置换台份↑,最大时长明显↑;置换工作KIVA数↓,最大时长↓。
(6)置换不及时原因:在极端情况下,同一时刻会产生多个置换任务,而现有KIVA数量无法满足全部置换需求。
4.3.4 优化建议。通过分析各参数变化趋势,重新导入变量数据寻找最优方案(缺件情况最优),两方案下的展开变量数据设置见表4、表5。

表4 方案一(2台KIVA协同置换)数据
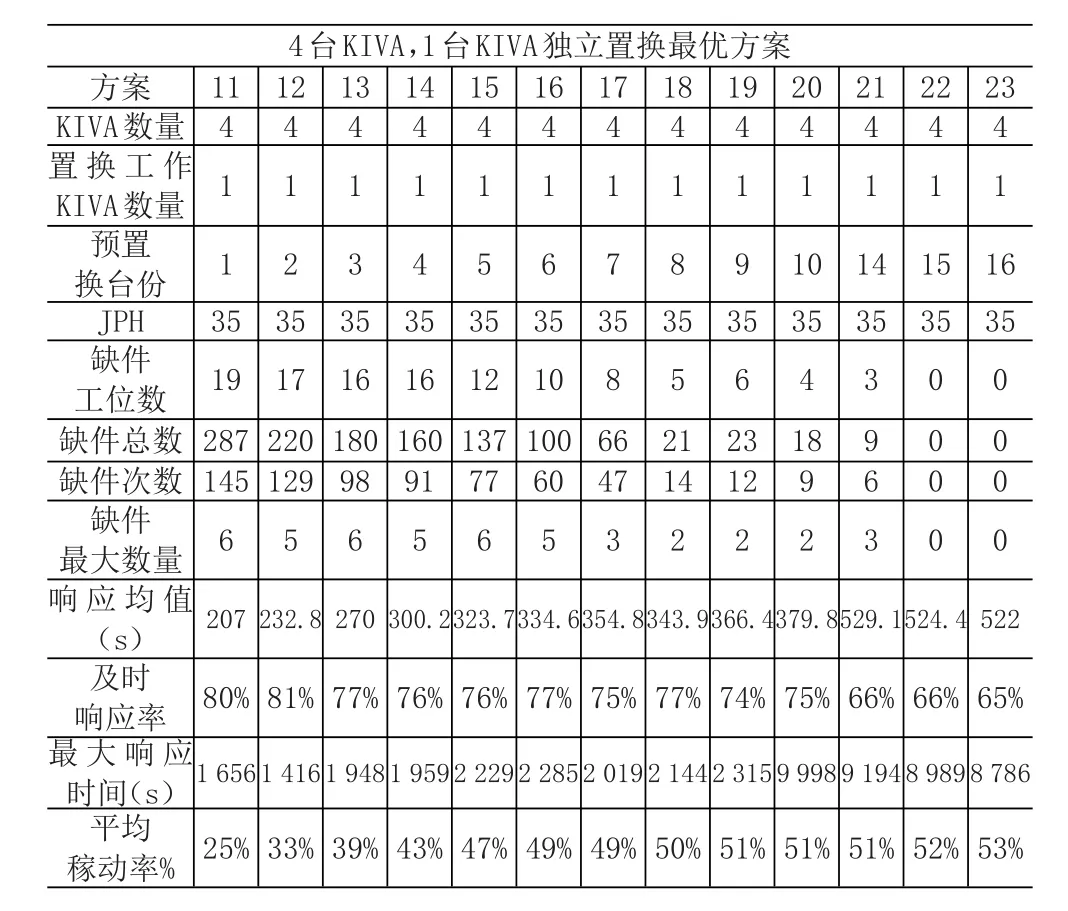
表5 方案二(1台仓储搬运机器人单独置换)数据
通过对两方案展开数据进行分析,并考虑实际作业情况,得出了最优建议:
方案一:设置预置换台份为4,设置充电位2个,各尺寸台车集配区缓存3台,考虑现场实际试运行,建议针对不同零部件设置不同的预置换台份。
方案二:设置预置换台份为8(结合现场实际作业考虑),设置充电位2个,各尺寸台车集配区缓存3台,考虑现场实际试运行,建议针对不同零部件设置不同的预置换台份。
5 结语
本文基于仓储搬运机器人的特点,对设备在汽车工厂一次物流领域的应用前景做了展望。从模式和信息两方面进行分析,发现仓储搬运机器人在集配拣选和供给作业中具备一定的应用可行性。
