BM3D去噪算法在仪表图像识别中的应用
2019-04-02孙慧媛
陈 波,丁 宁,边 境, 孙慧媛
(1.国网浙江省电力有限公司电力科学研究院,杭州 310014;2.杭州意能电力技术有限公司,杭州 310012;3.浙江理工大学,杭州 310007)
0 引言
目前,电力巡检一般采用人工方式,通过人工抄表记录对发电厂设备进行依次排查。发电厂或变电站内设备种类多,数量庞大,工作人员巡检一次需要花费很长时间,而且人工记录大量数据容易出现差错,所以人工巡检的人力成本很高且效果难以保证。为解决人工巡检中遇到的问题,同时又避免更新设备带来高昂的费用,使用自主巡检机器人是解决这一问题的最佳途径之一。自主巡检机器人通过其搭载的高清摄像头、红外热成像仪等数据采集设备获取电厂仪表设备的状态图像,然后通过图像定位和识别算法识别当前设备的状态信息,从而判断当前巡检设备是否发生异常。
自主巡检机器人不受天气因素的影响,在一定程度上代替工作人员对各种设备进行巡检,有效降低运维人员巡视强度和安全风险。然而巡检机器人在采集图像过程中,图像扫描设备受外界影响将不可避免的产生噪声,从而使得图像降质[1-2]。降质图像将直接影响到后续图像处理的结果,如特征提取、图像分割、图像识别等。因此在后续的图像处理操作之前进行图像去噪处理是非常必要的,而图像去噪一直是数字图像处理和计算机视觉的研究热点。
近年来,针对图像噪声问题,专家学者提出了大量的模型和方法。常见的传统去噪方法有均值滤波法、中值滤波法、维纳滤波法等,这些方法虽然能滤除噪声,但同时也会平滑图像中的高频信息[3]。因此,有必要寻找一种去噪方法,在去除噪声的同时保留图像的细节特征。本文采用的BM3D(三维块匹配)去噪算法是一种将非局部思想与变换域方法成功结合的图像去噪方法,是目前去噪效果最好的方法之一[4]。BM3D算法通过分割图像块,并将相似块匹配分组,后在变换域中去噪,算法性能与图像的相似性有一定关联[5]。将它应用于仪表图像去噪,能够得到较好的效果。
1 BM3D去噪算法
BM3D算法提出了一种新的图像去噪方法,基于块匹配三维变换域滤波[6]。它不仅利用图像的自相似性和冗余性等信息,而且结合了变换域的阈值方法,是一种多尺度、非局部的去噪技术,广泛应用于视频及图像的去噪[7-8]。主要分为两个步骤:第一步是基础估计;第二步是最终去噪,基础估计为最终去噪提供权值参数。该方法的算法流程如图1所示。
第一步,基础估计。首先将仪表噪声图像I1分割成若干个K×K大小的参照块,取图像中某一参考块记为P,然后以该参考块为中心选取搜索直径为n的方形区域作为搜索区域。在该区域内搜索与其差异度最小的块,搜索过程中的滑窗块用Q表示,把搜索到的块及其本身整合成一个三维矩阵TP。
寻找相似块这一过程可用公式来表示:


图1 BM3D算法流程
其次,将三维矩阵TP中的二维矩阵即噪声图像中的图像块进行二维Bior小波硬阈值收缩和矩阵第三个维度上进行Haar小波变换。公式如下:

利用如下硬阈值处理,对γ进行调整:

式中:λ3D为硬阀值滤波的阀值参数;σ为噪声的标准差,代表噪声的强度;x为图像块的矩阵值,用所在图像块左上顶点坐标表示。
然后通过在第三维的一维反变换和二维反变换得到处理后的图像块。至此,每个二维块都是对去噪图像的估计,最后将各图像块恢复到其原来的位置。
最后,对于某一像素点可能在多个图像块中出现,需要对有重叠的图像块估计值加权平均得到该像素点的基础估计值[9-12],公式如下:

式中:Q为含像素点的所有图像块;RPQ为任一集合G(P)中含像素点i的图像块Q的估计值RPQ=;ωP为图像块的基础估计权值,;NP为图像块经过硬阈值处理后矩阵数值中的非零个数。
第二步,最终估计。对基础估计后的图像再次进行分组并逐块估计。
类似于基础估计的图像分组,首先,对基础估计得到的图片再次进行图像块分组,此时将会得到两个三维数组:噪声图形成的三维矩阵TP和基础估计结果的三维矩阵TP′。
然后,将得到的两个三维矩阵均进行二维变换和一维变换,这里的二维变换采用DCT余弦变换。以基础估计结果的三维矩阵TP′对原始含噪图片的三维矩阵TP进行维纳滤波,得到最终的估计权值,将各图像块恢复到其原来的位置。
最后,与上一步一样,通过对重叠的图像块估计值加权平均得到像素点i的最终估计值:

通过基础估计、最终估计形成的BM3D算法去噪后的图像达到了很好的去噪效果,尤其是图像的细节得到了很好的还原与细化[12]。
2 试验结果与分析
为了验证以上去噪方法的性能,本文分别记录了中值滤波、维纳滤波、均值滤波以及BM3D去噪方法4种去噪方法的峰值信噪比和结构相似性。峰值信噪比是衡量去噪图片质量的常用定量指标,结构相似性是两幅图像相似性的指标。对于噪声图像I和去噪结果图像R,峰值信噪比的定义为:

图片的结构相似性定义为:

为了对比不同去噪算法的性能,试验中对压力表图像和压差表图像分别施加图像噪声σ=10,σ=20以及σ=30,对BM3D算法与其他几种传统的滤波算法进行了比较,其中中值滤波、均值滤波和维纳滤波都采用3×3滤波模板。表1给出了对不同图像施加不同噪声时几种去噪算法的比较,从表1的试验数据可以看出,相对于传统的图像去噪算法,BM3D的去噪效果最好,得到的去噪结果图与原图像最相似。
对几种去噪算法的主观评价如图2—4所示。
3 结语
本文将BM3D去噪算法应用于发电厂仪表图像识别的去噪。该方法先将含有噪声的图像分块并根据块匹配生成三维矩阵,然后在三维变化域去噪,最后逆变换还原图像。试验结果表明,利用BM3D算法对仪表图像进行噪声去除能取得较好的效果。通过与传统去噪方法的比较发现BM3D算法有明显的优势,但时间复杂度更高。

表1 不同方法去噪结果的PNSR和SSIM指标对比
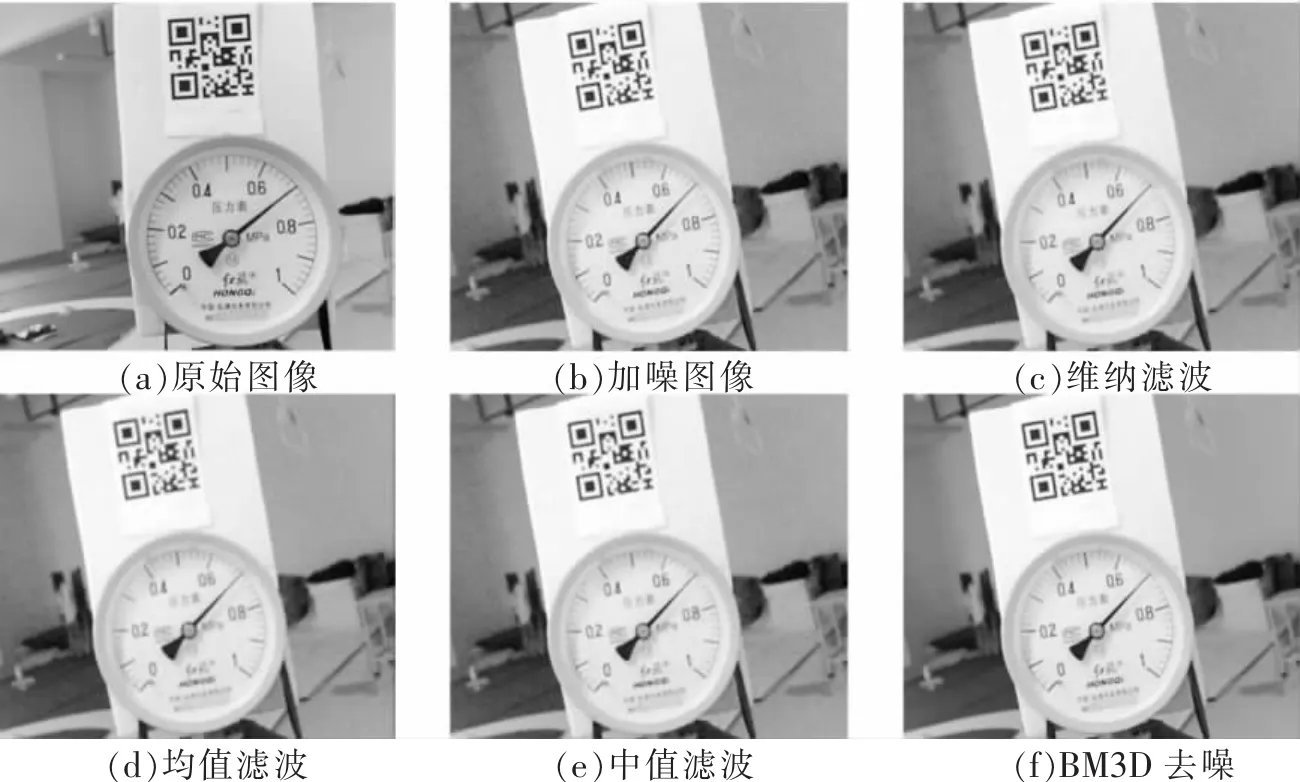
图2 σ=10时几种去噪算法的比较
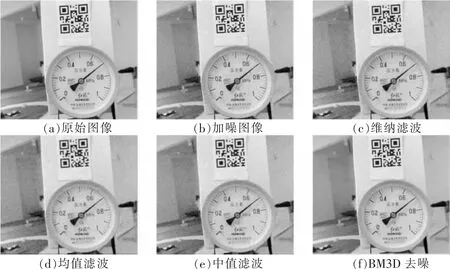
图3 σ=20时几种去噪算法的比较

图4 σ=30时几种去噪算法的比较