AUV水下对接装置的实现及试验
2019-03-30国婧倩吕厚权李默竹梁洪光
国婧倩,郑 荣,吕厚权,3,李默竹,梁洪光
(1. 中国科学院沈阳自动化研究所 机器人学国家重点实验室,沈阳 110016;2. 东北大学 机械工程与自动化学院,沈阳 110819;3. 中国科学院大学,北京 100049)
0 引 言
AUV通常自带能源在水下工作,工作时间和航行距离都有限制,这就需要回收以补充能量、读取信息和维护保养[1],但其释放和回收过程繁琐复杂,且耗时费力,存在安全隐患。因此需要水下对接技术,在不借助第三方设备的情况下,通过与海底观测网提供的接口及其他可能设备连接[2],使AUV自主完成充电、数据传输和新的任务下载。
自20世纪90年代初至今,国内外研究学者设计了各种AUV水下对接系统[3],其形式主要可以划分为5类:水面起吊回收式[4]、鱼雷管回收式、捕捉对接式[5]、包容对接式、平台对接式[6],其中包容对接式能最大限度减少对AUV外部的修改,对声学导航、AUV运动稳定性、航行控制和水阻力等基本不产生影响。国外典型的有美国WHOI研发的REMUS AUV[7]对接装置[8 – 10],MBARI 研制的 Dorado AUV 对接装置[11 – 12],Hydroid公司的REMUS100水面拖曳装置[13],Bluefin-12 的原型 UUV 对接补给站测试[14 – 15],韩国海洋工程研究中心的“ISIMI”AUV 对接装置[16 – 18];国内主要有哈尔滨工程大学的对接装置[19], 浙江大学研制的“海豚二号”对接装置[20 – 21],沈阳自动化研究所的水下主动捕捉式对接平台[22]和基于灯光导引的AUV水下对接装置[23],以及中国船舶重工集团的AUV水下接驳站[24]。水下对接系统在未来海底观测网络系统中具有广泛的应用前景,将为推动我国各类深海潜水器的应用奠定技术基础,具有一定的理论意义和工程应用价值。
1 问题描述
目前国内外的包容式水下对接装置顶端均与AUV首部直接接触限位,轴向无法调整,定位精度不高;为保证插拔成功率,对AUV入坞时的横滚姿态要求严格;非接触充电方式通信缓慢,且装置体积较大,增大AUV自身负载。本文介绍的对接装置主要解决水下大功率有线充电和精准定位插拔两大问题。
2 AUV 水下对接装置研究方案
结合待对接AUV的工作环境、工作特点及技术要求,针对各个对接功能需求进行相应机构的设计,设计本着结构简单、利于运输、可靠性高、定位精度高、充电效率高、数据传输能力强、模块程度高、适用性广的原则。
2.1 需求分析
AUV的水下对接是一个自动引导的过程,本装置采用超短基线(USBL)声学定位技术,为保证对接成功,其产生的功能需求有:导向调整、缓冲保护、限位锁紧、定位校正、水下插拔、无线电水下通信、液压系统实时控制、对接装置姿态检测、水下有线充电及数据传输等。基于以上功能需求分析,进行相应的机构模块设计。
2.2 工作原理
本文的对接装置主要将直径534 mm的作业型AUV作为对接目标,对接过程为:AUV入坞→轴向限位→锁紧→姿态校正→插拔传输。超短基线位于导向罩外侧,AUV首部携带声呐,通过声学通信提供AUV和对接装置间的位置和姿态信息。裙口式导向罩利用弧线实现锥口的渐缩过渡,逐步引导AUV入坞。框架首尾两端的行程开关传感器检测到AUV到位信息时,首部推行机构已对AUV进行轴向限位,同时驱动限位夹紧机构夹持AUV首部,检测到液压缸到位信息后,驱动首部推行机构配合定位销实现AUV的最终完全定位,达到接插件与接插座的对中精度,最后水下插拔机构完成插拔任务,对接完成。充电与数据传输完成后,释放AUV。
2.3 方案设计
AUV水下对接装置主要包括水面部分、水下电子舱、液压站3大部分,如图1所示。水面部分通过主缆与电子舱连接,完成摄像监控、下达指令、数据存储等功能。嵌入式控制器等元件密封在电子舱内,并提供对外接口,通过液压站驱动三大机构按顺序执行相应动作并收集液压缸到位信息。无线电、TCM5、行程开关等各类传感器位于外部,与电子舱共同实现对接装置与AUV间的无线通信、信息反馈、大功率有线充电、数据传输等功能。
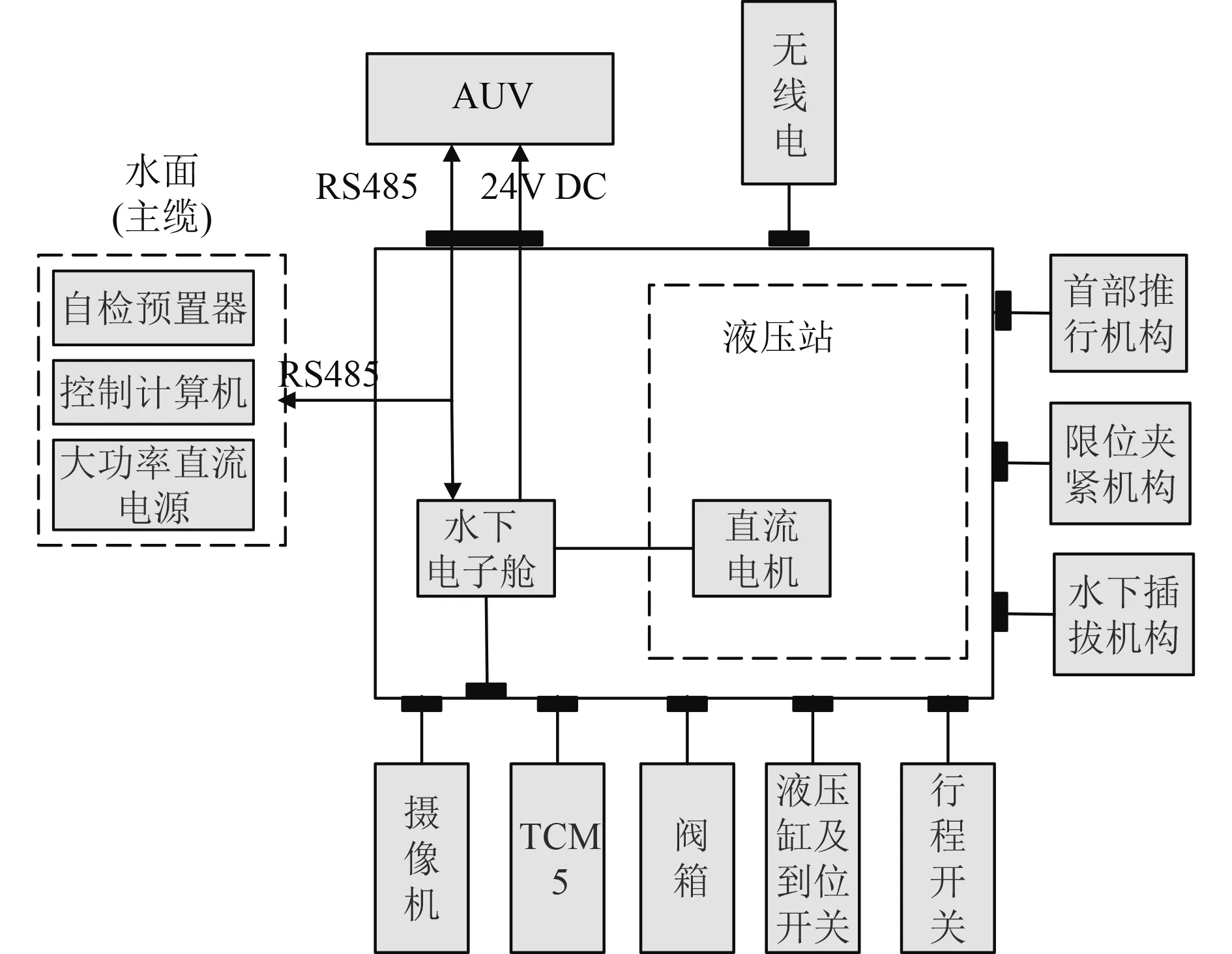
图 1 对接系统总体构成Fig. 1 System composition of the dock
2.4 AUV定位及姿态校正方法
保证对接成功的根本就在于满足接插件与接插座的对中精度要求,为此提出一种AUV姿态校正方法,尤其是对其横滚姿态的校正,如图2所示。AUV首部自身携带三角槽,弧板对AUV环抱限位,同时定位销进入AUV首部三角槽内,首部推行机构使AUV向后移动,通过定位销对三角槽运动的限制实现AUV姿态校正,定位销到达三角槽顶端且微受力状态时,校正完成,此时定位销轴线与AUV轴线位于同一水平面。
此方法是在AUV成功入坞后,再进行姿态校正,因此降低了AUV入坞前的姿态要求,增加了入坞成功率,在进行横滚姿态校正的同时,完成了AUV轴向和横向的限位。取校正某一环节,设AUV首部为以质点,以头部为正视方向,其受力分析如图3所示,其中F1为首部推行机构提供的向内轴向力;f2为定位销与三角槽间的向外摩擦力;M为定位销提供的转矩;q左与q右分别为弧板提供的均布载荷。
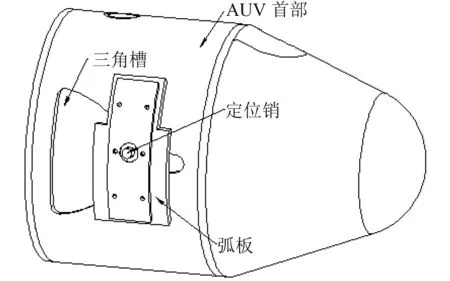
图 2 AUV 横滚姿态校正方法Fig. 2 AUV attitude correction method
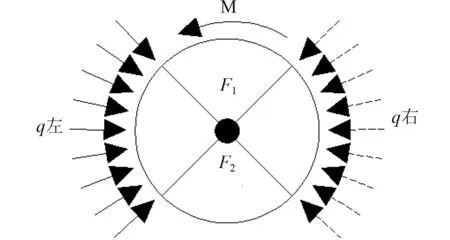
图 3 AUV 首部受力分析Fig. 3 Force analysis of the head of AUV
3 AUV 水下对接装置方案实施
3.1 结构设计
AUV水下对接装置结构原理如图4所示,主要由首部推行机构、限位夹紧机构、水下插拔机构、导向罩、超短基线、行程开关等组成,整体全长4.7 m。内部设有ABS板,对入坞后的AUV起到缓冲保护功能,框架内切圆直径为580 mm。
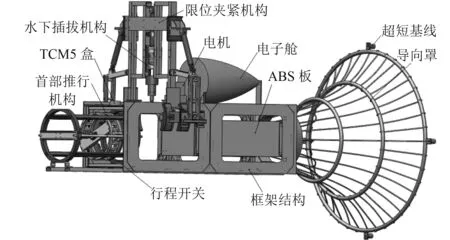
图 4 AUV 水下对接装置模型图Fig. 4 The structure schematic diagram of underwater AUV docking device
1)首部推行机构
首部推行机构主要进行轴向动作,采用液压缸驱动实现悬挂支撑块在导向轴上做直线往复运动,通过首顶罩与AUV首部部分接触,实现对AUV的有效缓冲及轴向定位。此间AUV首部与首顶罩之间会产生碰撞,需对首顶罩进行强度分析,基于液压缸最大推力为 2 000 N,对首顶罩在 2 000 N 的压力下进行静态分析,如图5所示。
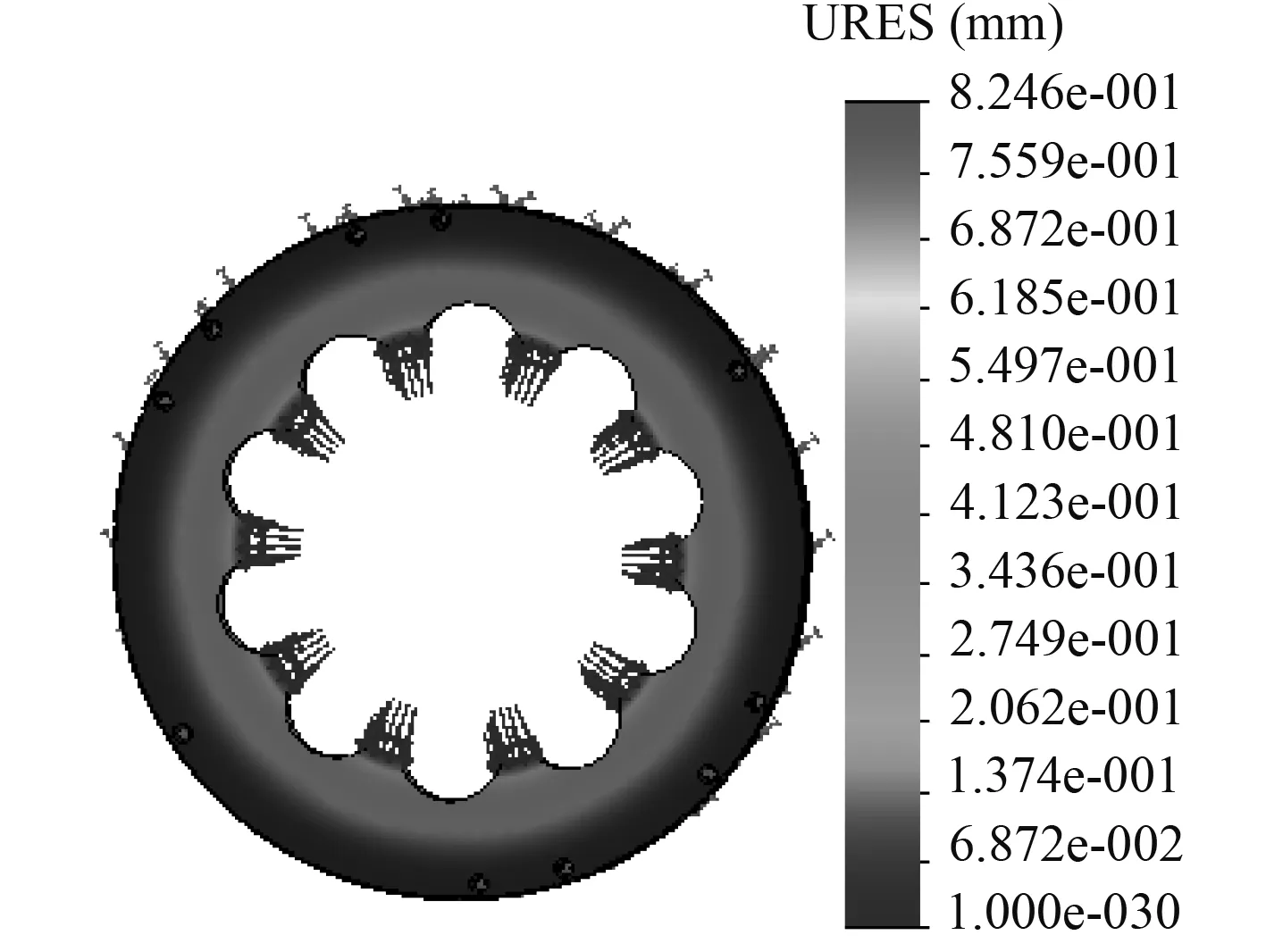
图 5 2 000 N 作用力下首顶罩的位移云图Fig. 5 The displacement cloud map of top cover under 2 000 N
通过对首顶罩的静力分析可知,在2 000 N作用力下,其最大变形量为0.824 6 mm,满足工程实际需要。
2)限位夹紧机构
基于AUV回转体的外形,限位夹紧机构采用两端对称方式,同步驱动。利用弧板取代传统的V形板,将线接触转换为面接触,2个弧板并列,后排的弧板对AUV姿态起到辅助作用。机构中加入了中间板,可进行尺寸微调,实现弧板环抱直径322.5~662 mm,本试验使用542 mm环抱直径。液压缸驱动过程中,两侧弧板中心间距变化如图6所示。
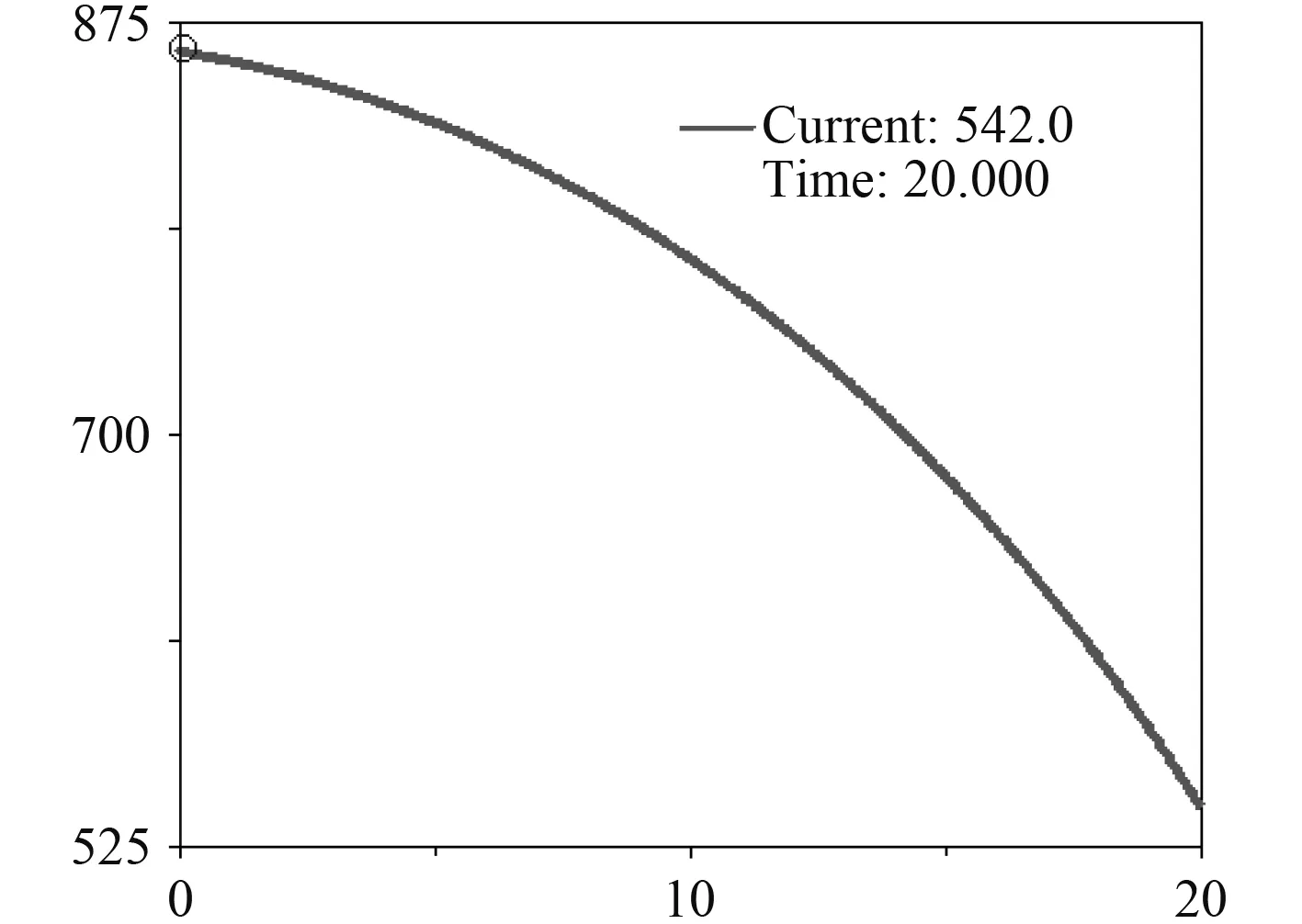
图 6 弧板间距变化曲线Fig. 6 Curve of distance change between arc plates
3)水下插拔机构
水下插拔机构是水下对接的最终执行机构,对接成功与否取决于接插件是否顺利进入AUV携带的插座。AUV在对接装置内定位后,不能保证插座每次的位置都相同,因此,接插件与插座存在位置或角度的偏差,为保证对接精度,考虑插拔力的存在,使用弹簧和万向节组合,即可被动补偿偏差又可承受拉力,弹簧参数如表1所示。
3.2 控制体系
水下对接装置控制体系主要分为水面控制终端、水下控制系统和外部设备等3部分,总体构成如图7所示。控制系统既可以配合AUV实时判断其状态,自主控制完成水下对接工作,也可以人为控制,实现水下有线大功率充电及通信的功能。
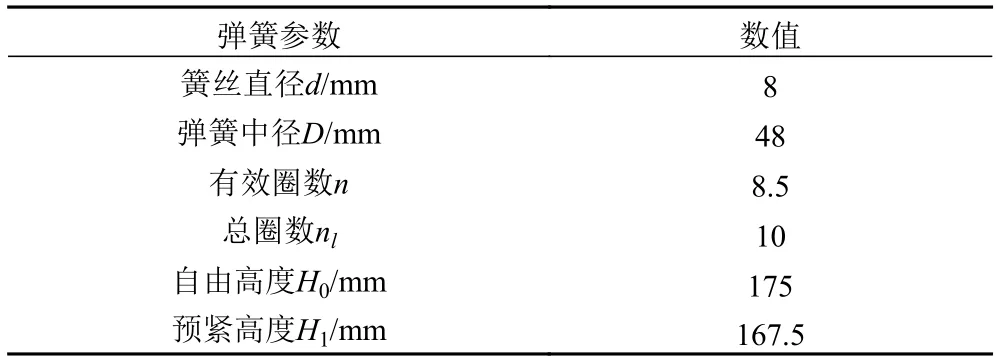
表 1 圆柱螺旋压缩弹簧参数Tab. 1 Parameters of cylindrical helical compression spring
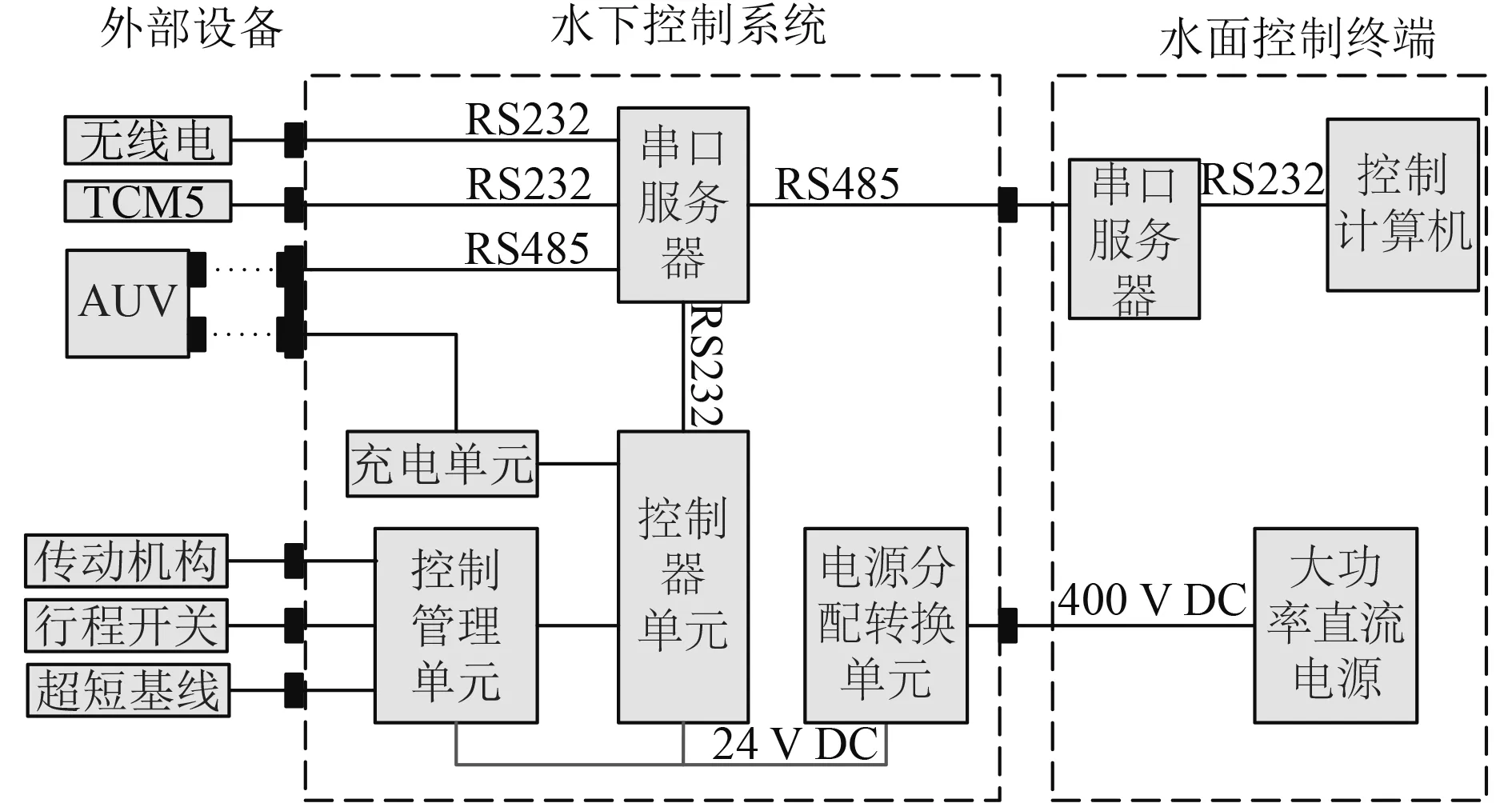
图 7 控制体系构成Fig. 7 The composition of the control system
水面控制终端主要由控制计算机、串口服务器和高压直流电源构成。控制计算机可以显示对接装置的状态以及载体的信息,还可以发送指令控制装置的动作。水下控制系统是整个对接装置的控制核心,其主要包括电源分配转换单元、控制器单元、控制管理单元、充电单元以及串口服务器等。电子舱通过水密电缆与液压站及传动机构、传感器以及无线电等外部设备相连接,为其提供电能、驱动信号并采集反馈信息。
3.3 液压体系
对接过程中,一个完整的动作顺序为:夹紧→推行→插入→拔出→收回→释放。综合考虑,液压系统选定为并联系统,方向控制阀选用具有中封功能的三位四通电磁阀,液压源为定量泵加溢流阀的组合方式,系统采用回油路节流调速回路,原理如图8所示,其中阀箱A1孔为备用油路。
根据对接装置负载大小,考虑液压缸起动摩擦力、动摩擦力、液压缸机械效率等因素,确定液压缸主要参数。本设计中液压缸为单活塞杆液压缸,根据公式确定液压缸的内径和缸杆截面积,进而确定系统的最大工作流量。式中:F为外负载;ηm为液压缸机械效率;A1为无杆腔工作面积;A2为有杆腔工作面积;P1为无杆腔工作压力;P2为有杆腔工作压力;D为缸筒内径;d为缸杆直径。
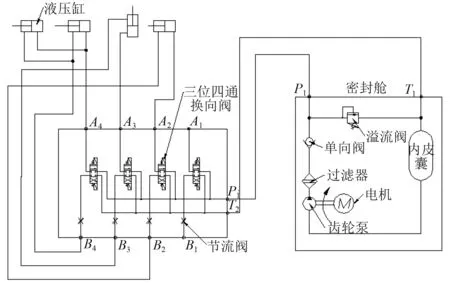
图 8 液压系统原理图Fig. 8 Hydraulic system diagram
4 水池试验
基于理论指导与分析搭建试验平台,关键部件使用铝合金(5A06)。对接装置通过4根吊带由吊车吊起,放入水池中,微露水面,AUV在距离对接装置约2 m的位置航向导向罩,对接流程如图9所示。
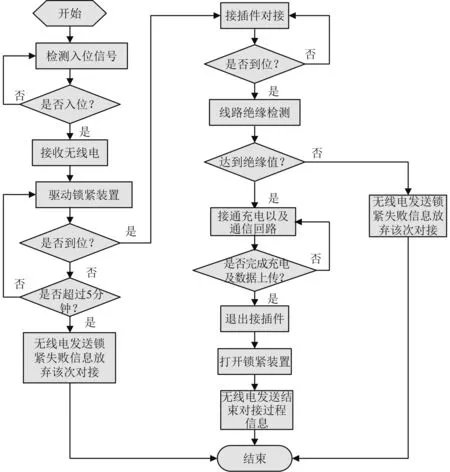
图 9 水下对接流程Fig. 9 The underwater docking process
水池试验结果表明:对接装置能够稳定可靠地实现对AUV的锁紧与插拔,其机械结构是可行的,且试验中发现AUV撞击导向罩后,悬挂的对接装置产生微晃动,该晃动有利于AUV进入对接装置。
5 结 语
本文在分析国内外各种形式对接装置的结构特点和功能后,基于目前存在的问题,设计的AUV水下对接装置主要特点如下:
1)采用直接接触充电方式,通讯快速,充电效率高、数据传输能力强;
2)内部结构简单,可稳定有效的调整AUV姿态,可靠性及插拔精度高;
3)对AUV入坞时的横滚姿态要求低,工程应用价值高;
4)具有很大的通用性,适合不同尺寸的AUV;
5)对接装置处于柔性状态比刚性状态更利于AUV入坞。
未来实际应用中水下对接装置需要固定于某一平台,使对接装置能够满足姿态、方向等调节需要,后续将对固定平台进行研究设计,以满足工程需求。
