基于霍尔和锁相环的改进型PMSM转子位置估计
2019-03-29蒋新柱
蒋新柱,翟 涌
(北京理工大学,北京 100081)
0 引 言
永磁同步电动机(以下简称PMSM)因其效率高、功率密度大、运行可靠等优点,被广泛应用于电动汽车的驱动系统中。在电动汽车用PMSM的控制中,准确地获取转子位置是实现精确控制的必要条件。转子位置估计方法可分为无位置传感器和有位置传感器两大类。无位置传感器方法需要通过相应的算法检测转子的位置与速度[1],易受电机参数和测量限制的影响,无法精确控制转矩、保证转矩的响应速度[2-5],其中有的方法还会导致额外的损耗与振动[6-8]。所以无位置传感器方法并不适用于电动汽车这种要求扭矩响应快且负载变化剧烈的工况。在有位置传感器的方法中,旋转变压器与编码器[9]虽然精度较高,但是增加了电机的成本与质量。所以,成本低、体积小、质量轻的霍尔传感器被广泛应用于车用PMSM的控制中。
由于霍尔传感器在一个电周期中仅有6个位置信号,将电周期平分为6个扇区,其精度为π/3,所以基于霍尔位置传感器的转子位置准确获取是目前国内外研究的热门领域。文献[10-11]利用平均转速法来估计转子位置,并在霍尔区间的边界进行了角度校正,消除了累积误差,但是在速度变化时将无法准确获取位置信息;文献[12]提出了平均加速度法,有效补偿了平均速度法的误差,但在实际使用中难以较好地实现转速闭环控制[13]。文献[14-15]在电机机械方程的基础上,建立了矢量跟踪观测器,对转子位置进行跟踪,并用傅里叶变换消除了谐波成分,但是该方法用到了机械参数,当车辆换挡和上下坡时,其效果将会受到影响。
本文研究了一种基于霍尔传感器和锁相环的改进型PMSM转子位置估计方法。该方法利用相位跟踪器对电机反电动势的相位进行跟踪,并将霍尔传感器计算出的速度信号作为相位跟踪器的前馈,以提高响应的速度与电机低速时的估计精度。在电机低速或起动时,反电动势较小或没有,会影响跟踪精度,这时霍尔信号作为前馈在闭环反馈的作用下,可以保证获得准确的转子位置。由于电机在运行过程中定子参数的变化、气隙的不均匀和传感器的误差等原因,往往会导致估算出的反电动势不对称,如果相位跟踪器采用常规同步参考系锁相环(以下简称SRF-PLL),则会导致相位跟踪上的误差,所以这里采用解耦双同步参考系锁相环(以下简称DDSRF-PLL)作为相位跟踪器对相位进行跟踪。最后,利用一台15 kW的PMSM进行实验验证,并与插值法进行对比,实验结果证明该方法可以准确稳定地获得转子位置。
1 反电动势估计
利用电机的电压方程估计反电动势,在α,β坐标系下电压方程如下:
(1)
由式(1)可计算出磁链:
(2)
对定子绕组感应电动势进行积分得到磁链在α,β坐标系分量。由式(2)可以看出,在计算转子磁链时有积分项,直接积分容易累积误差,导致最后计算出的结果严重偏离真实值。在积分器前加入一阶高通滤波,可以串联成为一阶低通滤波器[16],在积分的同时,消除了直流分量带来的误差。图1示出了该方法求取反电动势的计算框图。
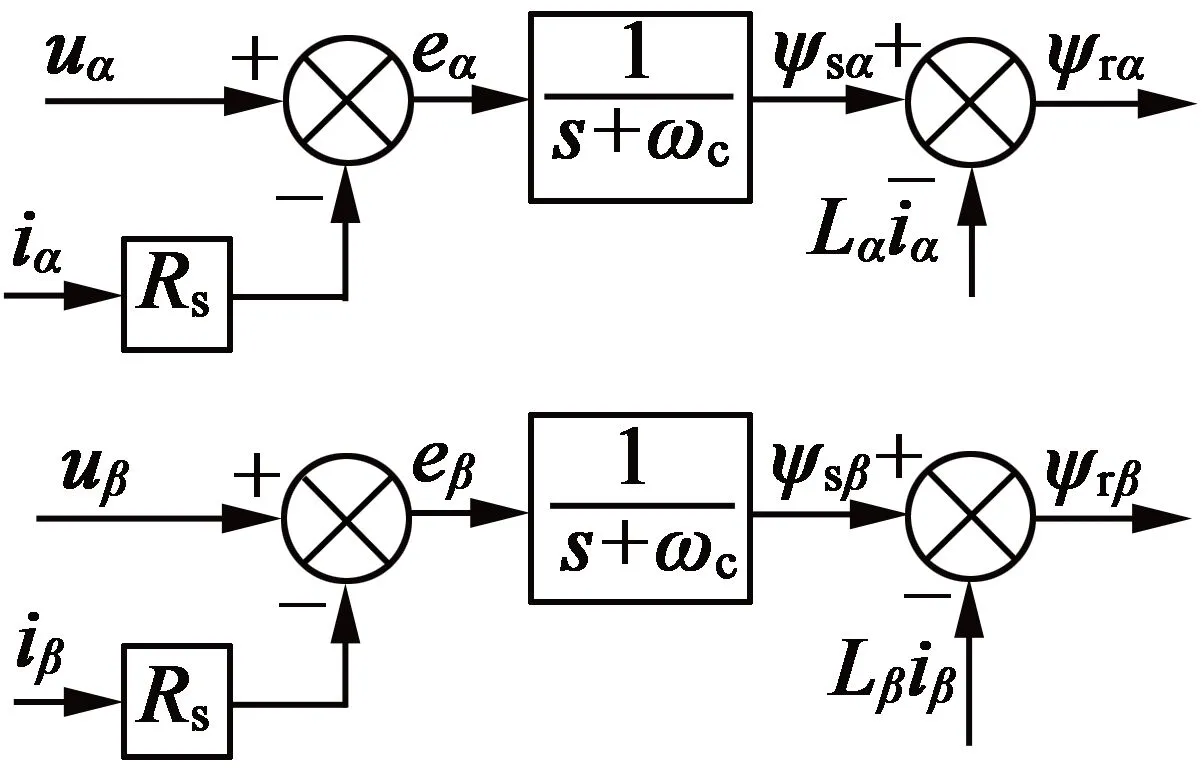
图1 基于一阶低通滤波器的转子磁链计算框图
2 相位跟踪器设计
根据上节内容可计算出电机反电动势在α,β坐标系下的分量ψrα,ψrβ,则电机的角度θr=arctan(ψrβ/ψrα),可以用SRF- PLL进行相位跟踪[17]。但是在实际运行中,因为电机参数的变化、气隙不均匀和传感器的误差等原因,会导致计算出的反电动势不对称。图2是单片机根据上节方法估算出的反电动势,此时如果采用SRF-PLL对其进行相位跟踪,则会出现跟踪误差,如图3所示[18],跟踪过程中出现了相位变形。
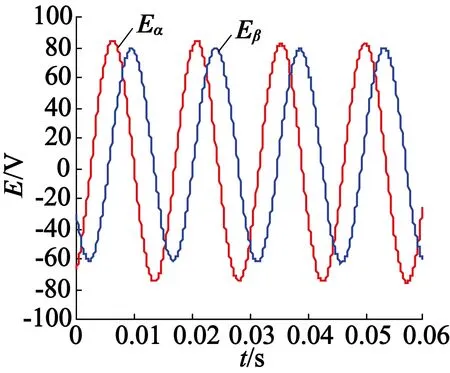
图2 估算的反电动势波形
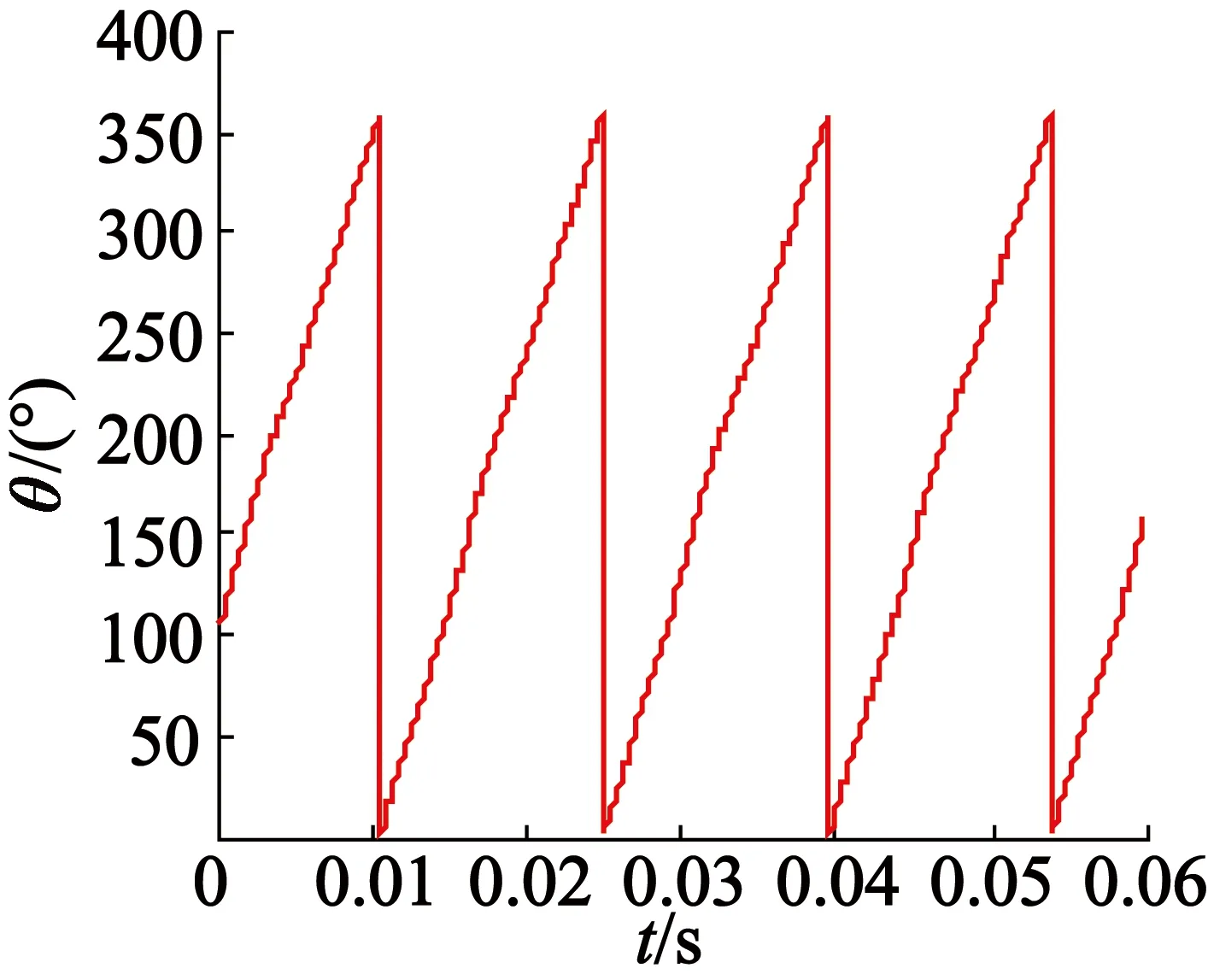
图3 SRF-PLL跟踪角度

图4 电压矢量在双Park变换下的矢量分解图

(3)


上述假设条件代入式(4)和式(5)中并化简,求出正负序分量的值:


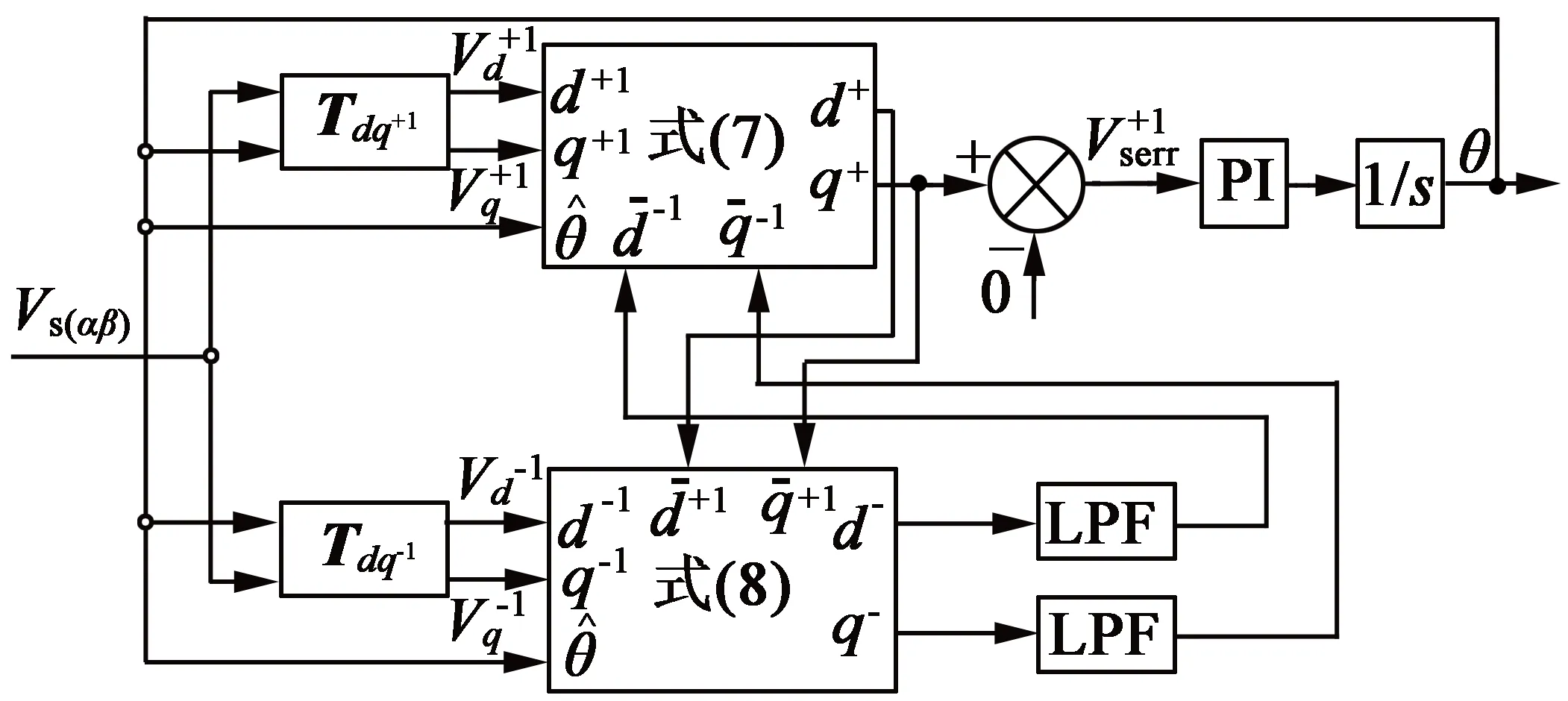
图5 DDSRF-PLL框图
3 霍尔前馈
为了提高相位跟踪器的跟踪速度,将霍尔信号作为相位跟踪器的前馈,这样保证了相位跟踪器在电机起动和低速时可以准确地获取转子位置。因为电机低速和起动时,反电动势的幅值很小或为零,这时相位跟踪器主要受霍尔前馈的影响,在闭环反馈的作用下,其输出结果的连续性将好于插值法。整个相位跟踪器的结构如图6所示。由传感器测量出uαβ,iαβ,由第一节内容可估算出反电动势ψrαβ。然后由DDSRF-PLL对反电动势的基波相位进行跟踪,并利用霍尔信号的前馈,加快了响应速度,提高了相位跟踪器在电机起动和低速时的性能。
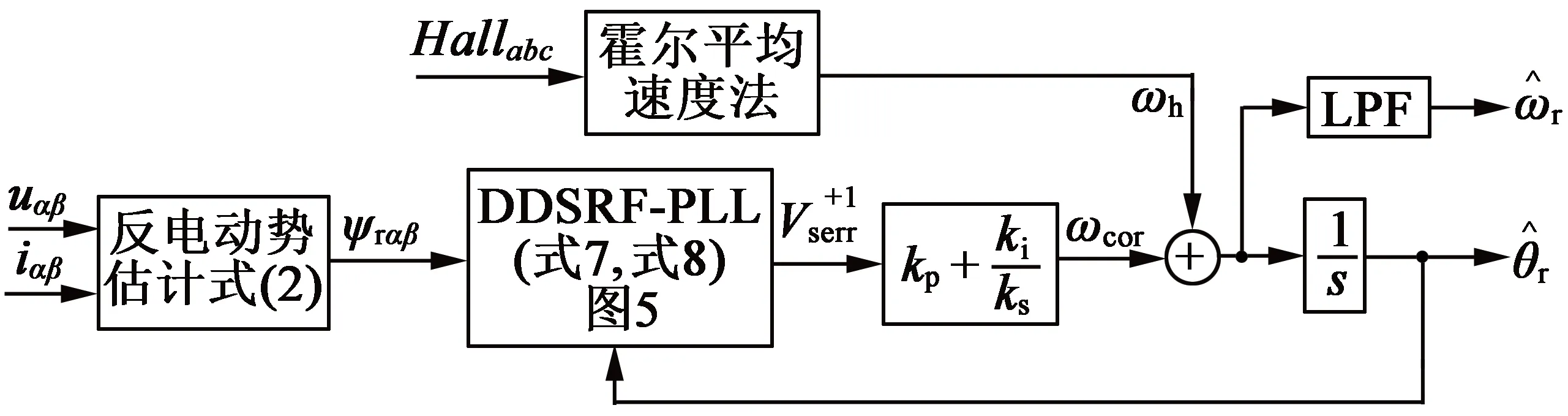
图6 转子位置估计算法框图
4 实验验证
依据本文的转子位置估计方法,使用DSP芯片MC56F84789为核心控制器,嵌入算法进行实验验证。PMSM参数如表1所示。测试电机与控制如图7所示。

表1 测试电机参数

(a) 电机

(b) 控制器
4.1 有无载荷工况下的对比
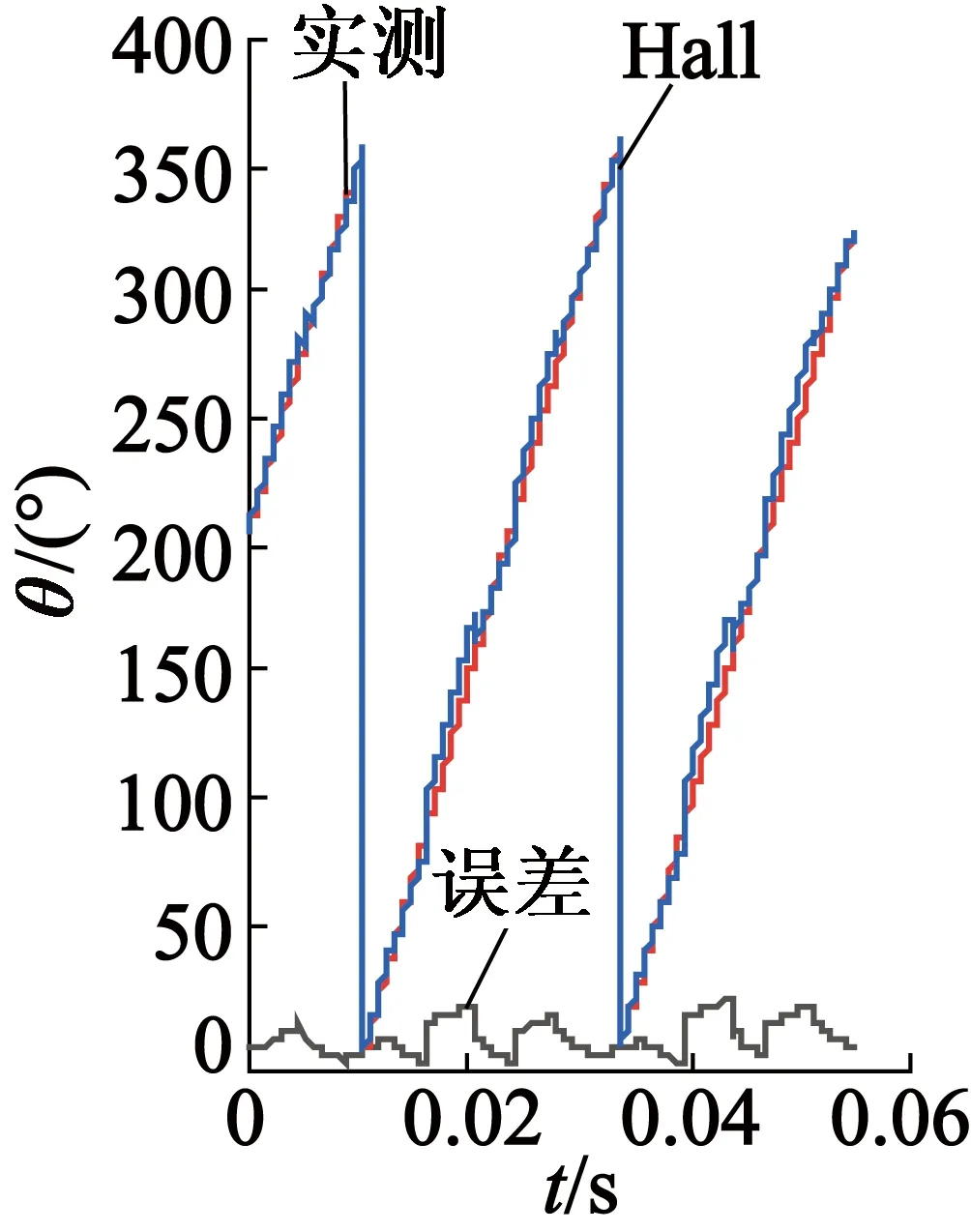
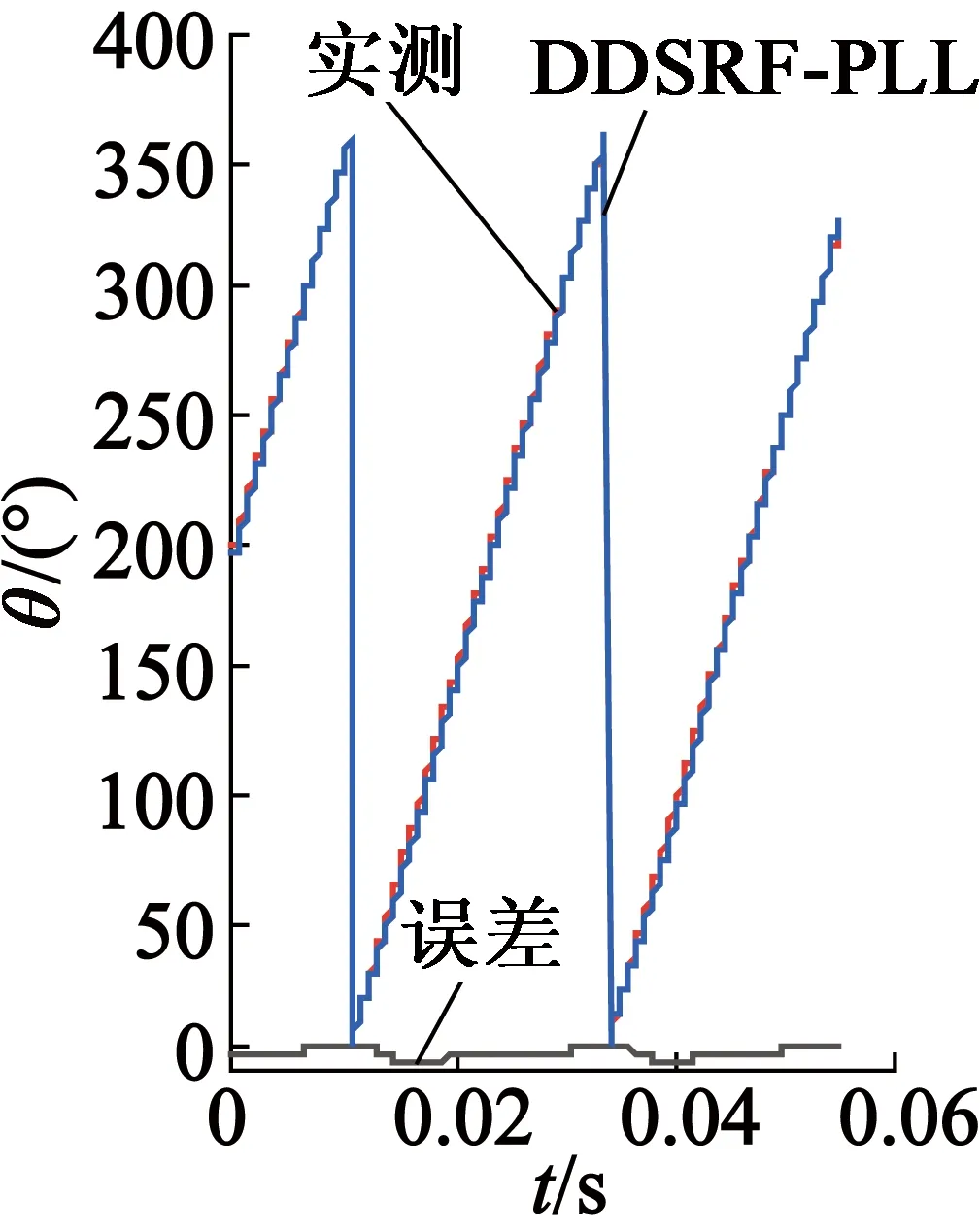
实验时,将插值法与本文的采用DDSRF-PLL的转子位置估计方法进行对比,插值法采用平均速度法。分别在500 r/min,空载和10 N·m的工况下进行验证。图8为电机空载时的转子位置对比图,表2为转子位置误差分析对照表。

(a) 插值法

(b)DDSRF-PPL

估计方法误差最大值lmax/(°)平均值e-/(°)标准差ef/(°)插值法15.25.513.83DDSEF-PLL5.11.481.26
由图8可知,简单的插值法会导致转子位置的跳变,尤其在霍尔扇区边界进行校正时。如表2所示,其最大偏差高达15°左右,平均误差为5.51°,误差的标准差高达3.83°。与插值法相比,本文的方法可以更精确地获取转子位置,最大偏差为5°左右,平均误差为1.48°,误差的标准差为1.26。加载10 N·m时,在500 r/min下验证结果如图9和表3所示。
由图9和表3可知,在加载时,插值法获取的转子位置进一步恶化,本文的方法获取的转子位置依旧平滑稳定。
(a) 插值法
(b)DDSRF-PPL

估计方法误差最大值emax/(°)平均值e-/(°)标准差ef/(°)插值法19.716.095.45DDSRF-PLL5.21.981.59
4.2 电流特性的对比
对比分析d,q轴电流和A相电流在不同转子位置控制下的差别。图10(a)是用插值法获得的转子位置对电机的控制,工况为速度500r/min,载荷20N·m。由图10可见,d,q轴电流振荡明显,A相的相电流畸变严重。图10(b)为采用本文方法,相较于插值法,d,q轴电流振荡明显较小,尤其是d轴电流,振幅由原来的5 A降到2 A,A相的相电流更加平滑,总谐波失真从34.5%降为17.3%。

(a) 插值法
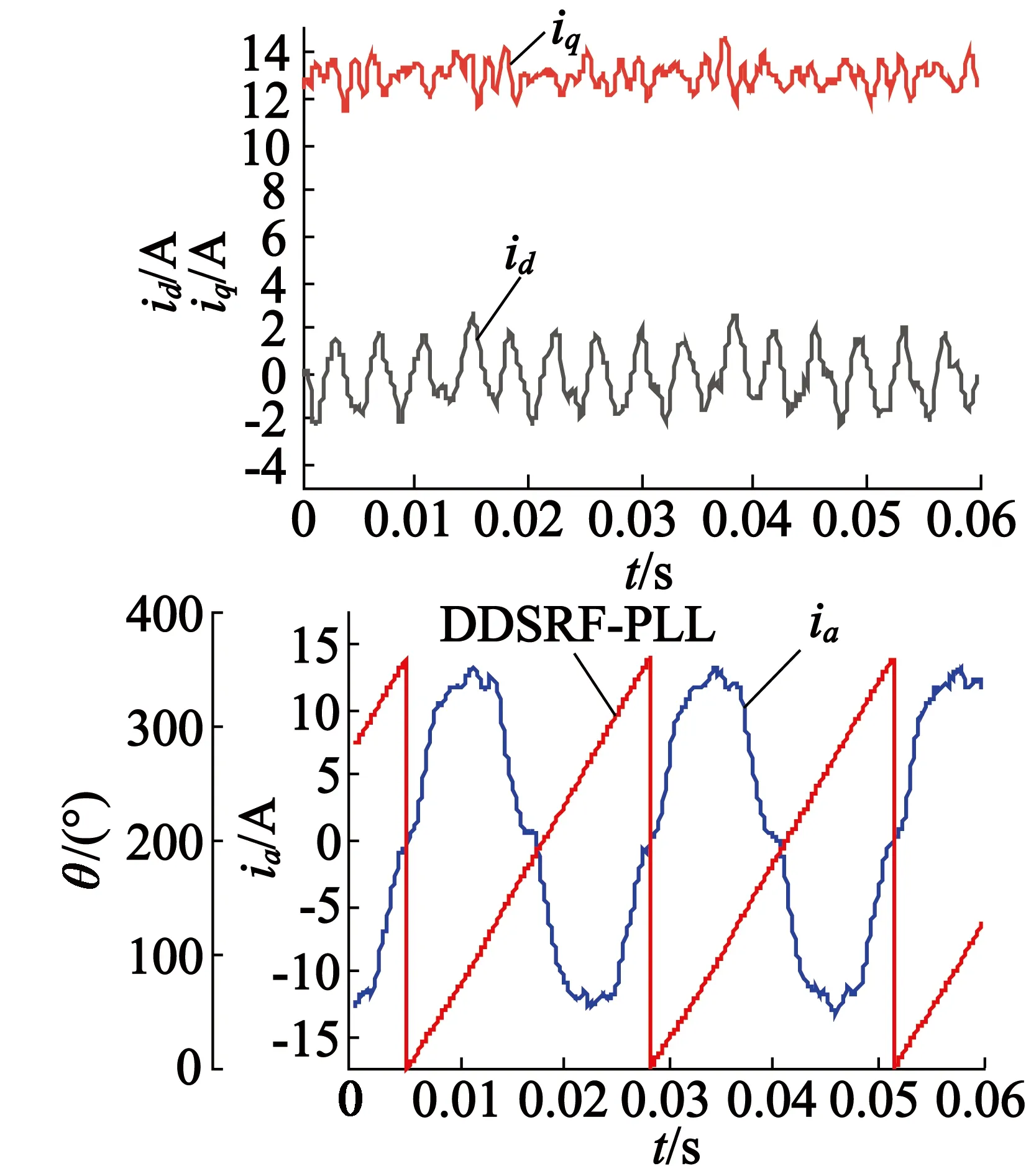
(b)DDSEF-PPL
4.3 采用不同锁相环时的对比
最后对比了采用DDSRF -PLL的相位跟踪器与采用SRF-PLL的相位跟踪器的跟踪结果,在速度500 r/min,载荷10 N·m的工况下,结果如图11所示。使用SRF-PLL的方法获取的角度在开始时发生了偏差,这是由于电机控制器的主控芯片在经过采样、计算和滤波后,计算出的反电动势幅值不对称,SRF-PLL仅简单地对相位进行跟踪,没有消除负序分量的影响,导致跟踪结果失真,这种情况在实际应用中很难避免。而使用DDSRF-PLL则可以消除负序分量的干扰,较好地跟踪反电动势的基波相位。

图11 不同锁相环跟踪效果的转子位置估算对比(500 r/min,10 N·m)
5 结 语
本文设计了一种基于霍尔位置传感器和锁相环的改进型PMSM转子位置估计方法,利用定子电压方程估算出反电动势,将霍尔信号作为前馈量输入到相位跟踪器中,提高了电机低速和起动性能。使用DDSRF跟踪反电动势的相位,可在输入信号幅值不对称的情况获取基波相位,增加了该方法的适应能力。
实验结果表明,本文方法与插值法相比,转子位置的精度提高了5.47%,平均误差缩小29.6%,方差缩小为10%。该方法能精确平滑地获取转子位置,消除了插值法计算转子位置时的跳动。由于转子获取的转子位置更精确稳定,电流的控制精度也得到改善,d轴电流振幅缩小将近50%,相电流的总谐波失真降为原来的50.3%。
该方法利用反电动势与霍尔信号计算出转子位置,与机械参数无关,在车辆换挡时不受影响,更适用于车辆驱动系统。