永磁同步电机变指数快速幂次趋近律滑模控制
2019-03-29张远来李京鸿段燕芳
黄 灿,张远来,李京鸿,段燕芳
(山东科技大学,青岛 266590)
0 引 言
三相永磁同步电机(以下简称PMSM)是一个强耦合、多变量的非线性复杂系统,具有体积小、效率高、可靠性强等优点,在许多高精度控制场合被广泛应用。目前PMSM调速大都采用PI调节器进行控制,但是当电机内部参数发生变化或者有外部扰动时,传统的PI控制算法难以实现理想的高精度的调速要求。因此,PMSM的控制系统中应用了许多效果优异的非线性控制方法,其中包括滑模控制[1]、预测控制[2]、鲁棒控制[3]、自抗扰控制[4]等。
滑模变结构控制由于其鲁棒性强、对参数变化和外部扰动不敏感等优点,成为研究的热点,并在电机控制系统中得到广泛的应用。文献[5]在等速趋近律中加入了系统状态变量。该方法根据系统状态距离平衡点的远近,自适应调整等速趋近律的趋近速度,并减小抖振。文献[6]采用最大转矩电流比控制分配定子d,q轴电流,选取合适的积分滑模面和切换增益,增强了系统的鲁棒性。文献[7]通过引入非线性幂次组合fal函数,构造了基于跟踪偏差的变速趋近律,使得切换增益具有随系统偏差自适应调整的特性,抑制系统抖振。文献[8]提出输出受限约束下的变指数幂次趋近律,满足无抖振、有限时间趋近滑模面、提高收敛速度的要求。
为了提高PMSM调速系统的动静态性能,本文研究了一种变指数快速幂次趋近律的方法。在变指数幂次趋近律中加入纯指数项和含有e-μ|s|项的函数,使系统状态在趋近滑模面时收敛速度快,在滑模面上运动时抖振小。基于本文的趋近律,设计速度控制器,选取积分滑模面函数,在PMSM矢量系统中,与传统指数趋近律控制、PI控制进行仿真对比,验证变指数快速幂次趋近律速度控制器的优越性。
1 PMSM数学模型
为了方便控制器的设计,简化分析,所选PMSM为表贴式,建立d,q坐标系下的数学模型:
(1)
式中:ud和uq分别是定子电压的d,q轴分量;id与iq分别是定子电流的d,q轴分量;R,Ls是d,q轴坐标下的定子电阻与定子电感;p是电机磁极对数;ψf为永磁体磁链;TL是负载转矩;J是转动惯量;ωm是转子机械角速度;B为摩擦系数[9]。
为了得到良好的控制效果,在表贴式PMSM控制系统中,令id=0。对式(1)进行整理可得如下数学模型:
(2)
设计PMSM矢量控制系统的速度控制器,就是为了让电机在任何工况下的实际转速ωm能快速准确地跟踪给定转速ω,所以定义PMSM的状态变量:
x=ω-ωm(3)
对式(3)进行求导并结合式(2)得:
(4)
令u=iq,b=B/J,d=3pψf/(2J),e=dω/dt,f=(Bω+TL)/J。把ω和TL的变化量当作扰动量,对式(4)进行整理,可以得到PMSM转速控制系统状态方程:

(5)
式中:Δb,Δd,Δf是电机参数变化量。令η=-Δbx-Δdu+Δf,式(5)可以简化:

(6)
2 滑模速度控制器设计
滑模速度控制器的设计需要选择合理的滑模面和设计合适的控制律,使系统轨迹在控制律的作用下快速趋近滑模面并沿着滑模面运动。针对PMSM转速控制方程式(6)进行滑模面的选取与趋近律的设计。
2.1 积分滑模面的选取
传统的滑模面函数中包含速度误差的微分分量,容易产生高频噪声,引起系统抖振[10]。积分滑模面函数具有平滑转矩、减小系统稳态误差、削弱抖振、增强控制器稳定性的良好品质,所以本文针对PMSM转速控制方程式(6)选取积分滑模面函数,进行速度滑模控制器的设计。积分项的s函数基本形式如下:

式中:k>0。
对式(7)进行求导,得到积分滑模面如下:

(8)
k值的大小影响系统响应趋于稳定的快慢。k值越大,稳定时间越短,但是k值太大,会加大滑模的抖振。k需要根据具体情况来选择。
2.2 变指数快速幂次趋近律的设计
系统状态在到达滑模面时并不是严格按照所设计的运动轨迹在滑模面上运动,而是在滑模面上下穿越,从而造成抖振。研究者为克服滑模控制的这一缺点,在等速趋近律、指数趋近律、幂次趋近律、一般趋近律的基础上衍生出快速趋近律、多幂次趋近律等多种趋近律[11-13],但大多都只是采用固定指数与固定增益的方法。本文在文献[8]的基础上设计了变指数快速幂次趋近律:
(9)
式中:ε>0,q>0,α>0,0<β<1,0<λ<1。
趋近律的第一部分是变指数幂次趋近项和含有指数项e-μ|s|的函数,第二项是纯指数项。
1)当系统状态远离滑模面时,|s|的值较大,e-μ|s|趋近于零,h(s)趋近于1/λ,增大了变指数幂次项的增益,提高了趋近速度。在系统状态接近滑模面时,e-μ|s|趋近于1,h(s)趋近于1,变指数幂次趋近项的增益保持不变,保留变指数幂次趋近项的优点。
2)当|s|≥1时,变指数快速幂次趋近律|s|的指数是|s|/α,能使系统状态快速趋近滑模面,解决了传统幂次趋近律趋近速度慢的问题。
3)当|s|<1时,变指数快速幂次趋近律|s|的指数是大于0小于1的常数,此时系统按照幂次趋近项和纯指数项靠近滑模面,既减小了系统抖振,也增加了趋近滑模面的速度。
用经典的系统对本文所设计的趋近律与幂次趋近律、指数趋近律对比分析。考虑如下被控对象:

(10)

滑模函数:
(11)
式中:c>0。
跟踪误差:
(12)
式中:θd是理想位置信号。则:
(13)
式中:S为趋近律。
滑模控制器:
(14)
式中:c取15,指令信号θd(t)=sint。
幂次趋近律、指数趋近律、变指数快速幂次趋近律如下:
(a) 幂次趋近律
(b) 指数趋近律
(c) 变指数快速幂次趋近律
幂次趋近律、指数趋近律、变指数快速幂次趋近律仿真参数如表1所示。
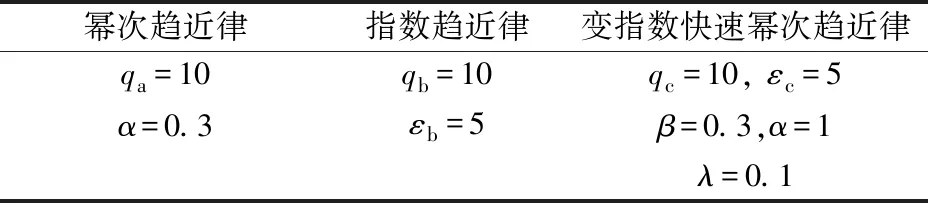
表1 三种趋近律参数
三种趋近律仿真结果如图1~图3所示。相比指数趋近律、幂次趋近律的控制效果,变指数快速幂次趋近律无论是在趋近速度还是抑制抖振方面都有较好的优点,在趋近运动中收敛速度快,滑模运动中无抖振。
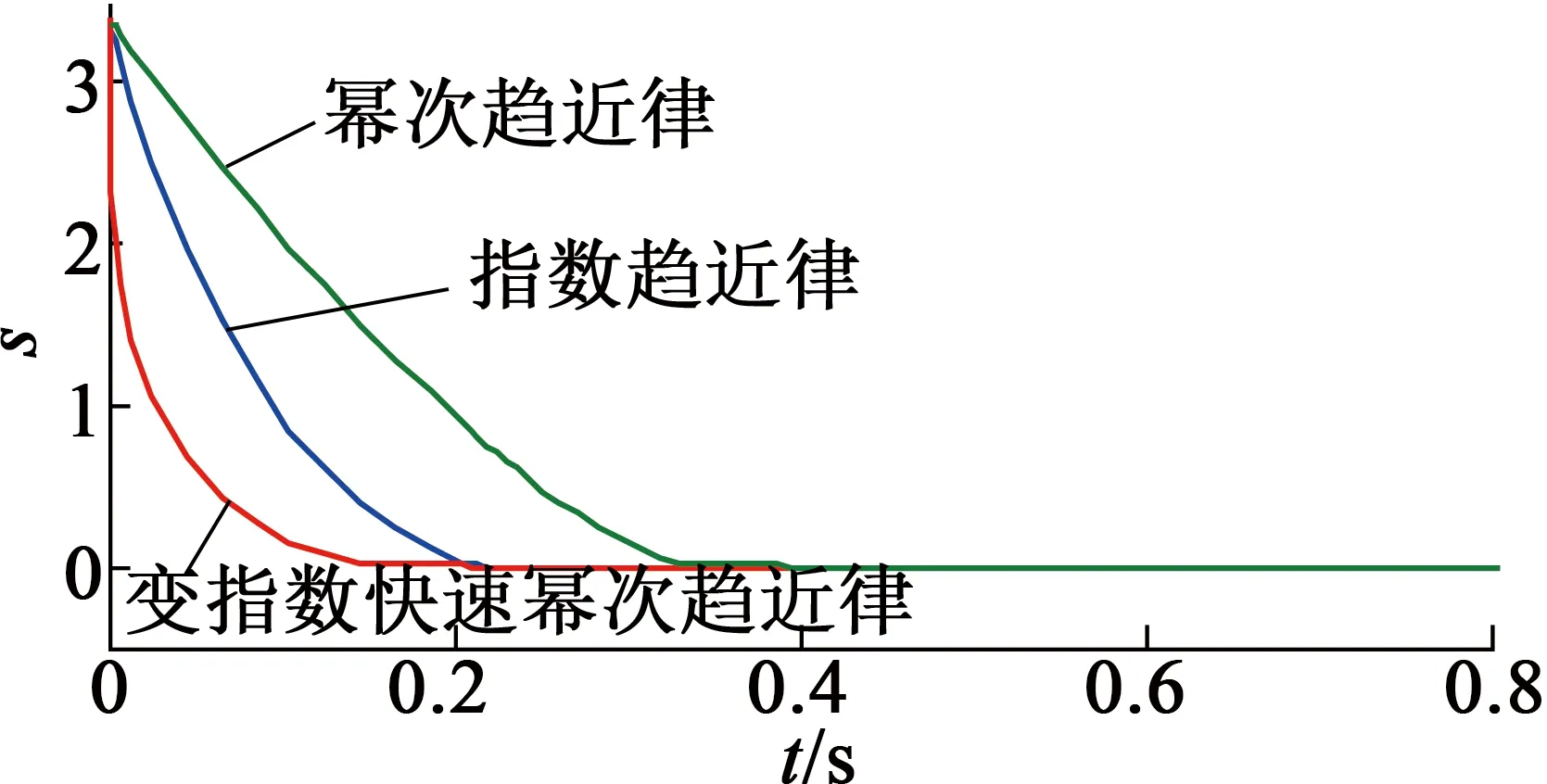
图1滑模面函数s随时间t变化曲线
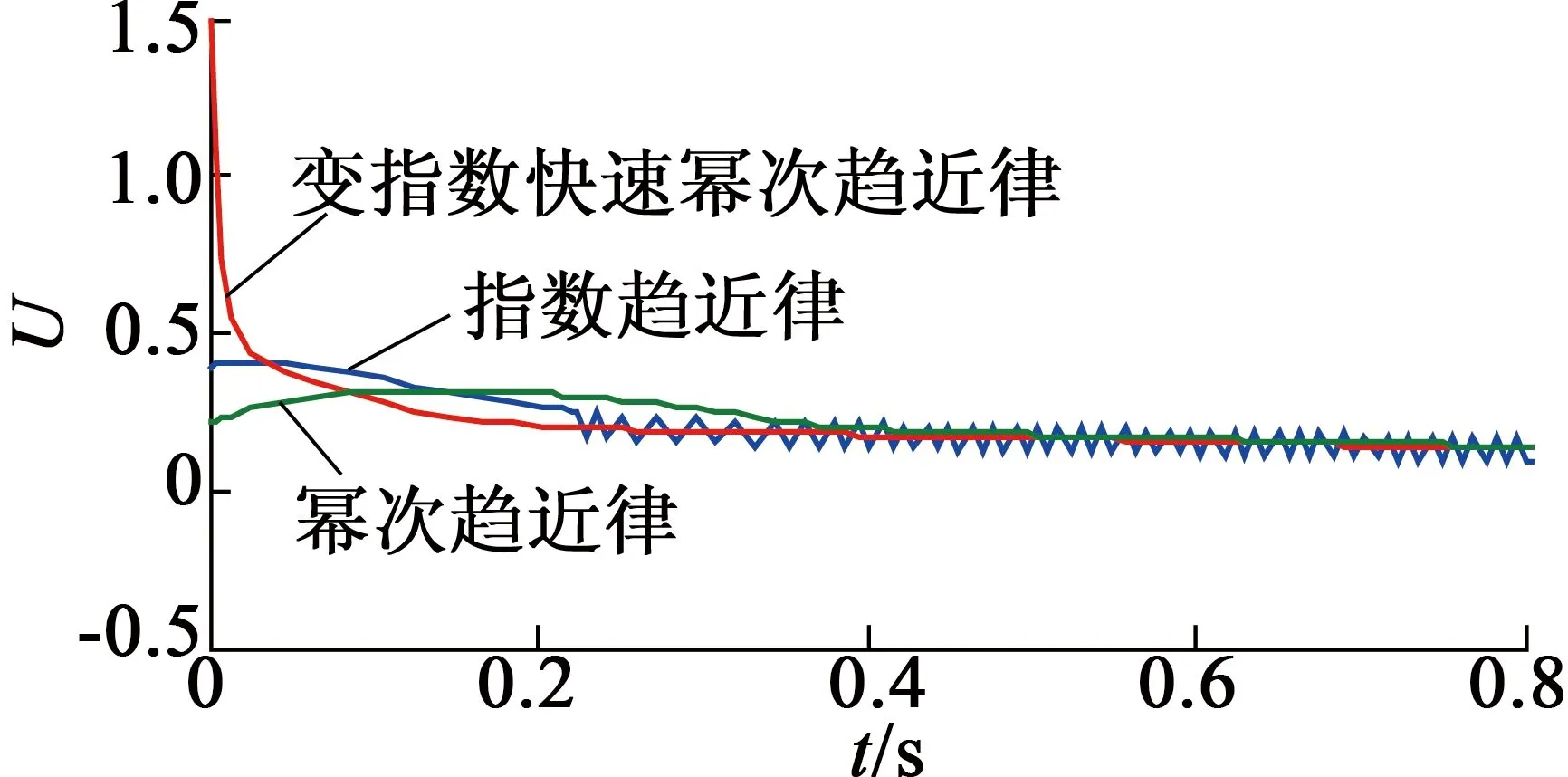
图2控制输入u随t变化曲线
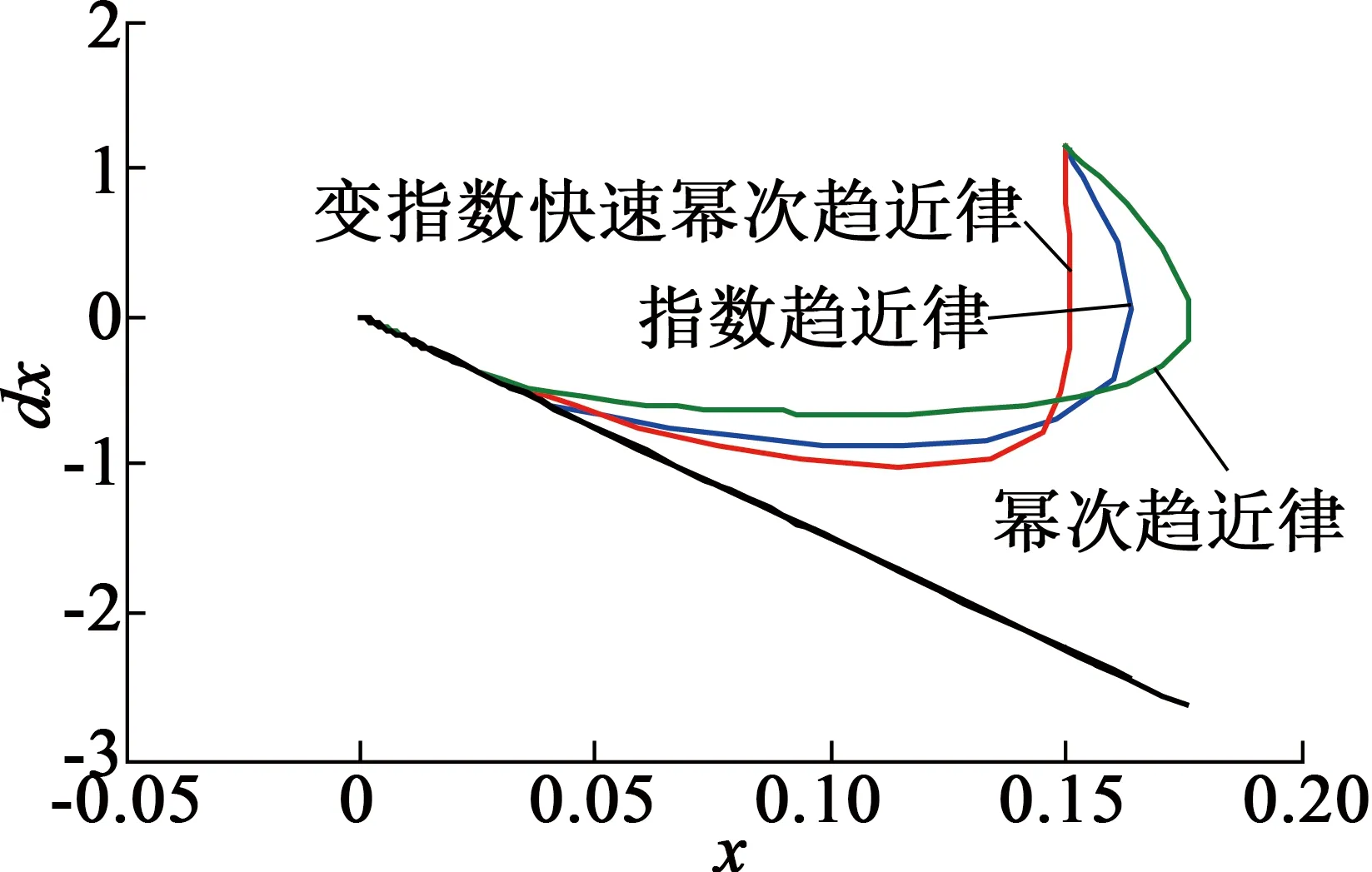
图3不同趋近律相轨迹趋近过程
基于变指数快速幂次趋近律的优点,采用该趋近律式(9)、系统状态方程式(6)和滑模面函数式(8)可以得到速度控制器的表达式:
(15)
3 滑模速度控制器稳定性分析
为了分析所设计的速度控制器的稳定性,首先定义Lyapunov函数:
(16)
对V(x)求导,则有:


4 系统仿真及其分析
仿真对比变指数快速幂次趋近律滑模控制、指数趋近律滑模控制和PI控制。以表贴式三相PMSM矢量控制系统为例,应用MATLAB/Simulink搭建系统模型,PMSM的参数如下:极对数p=4,定子电阻R=2.875Ω,定子电感Ls=8.5mH,永磁体磁链ψf=0.175Wb,转动惯量J=0.000 8kg·m2,阻尼系数B=0.001N·m·s。基于变指数快速幂次趋近律速度控制器的PMSM调速系统框图如图4所示,其中Nr为实际电机转速,Nref为给定电机转速。
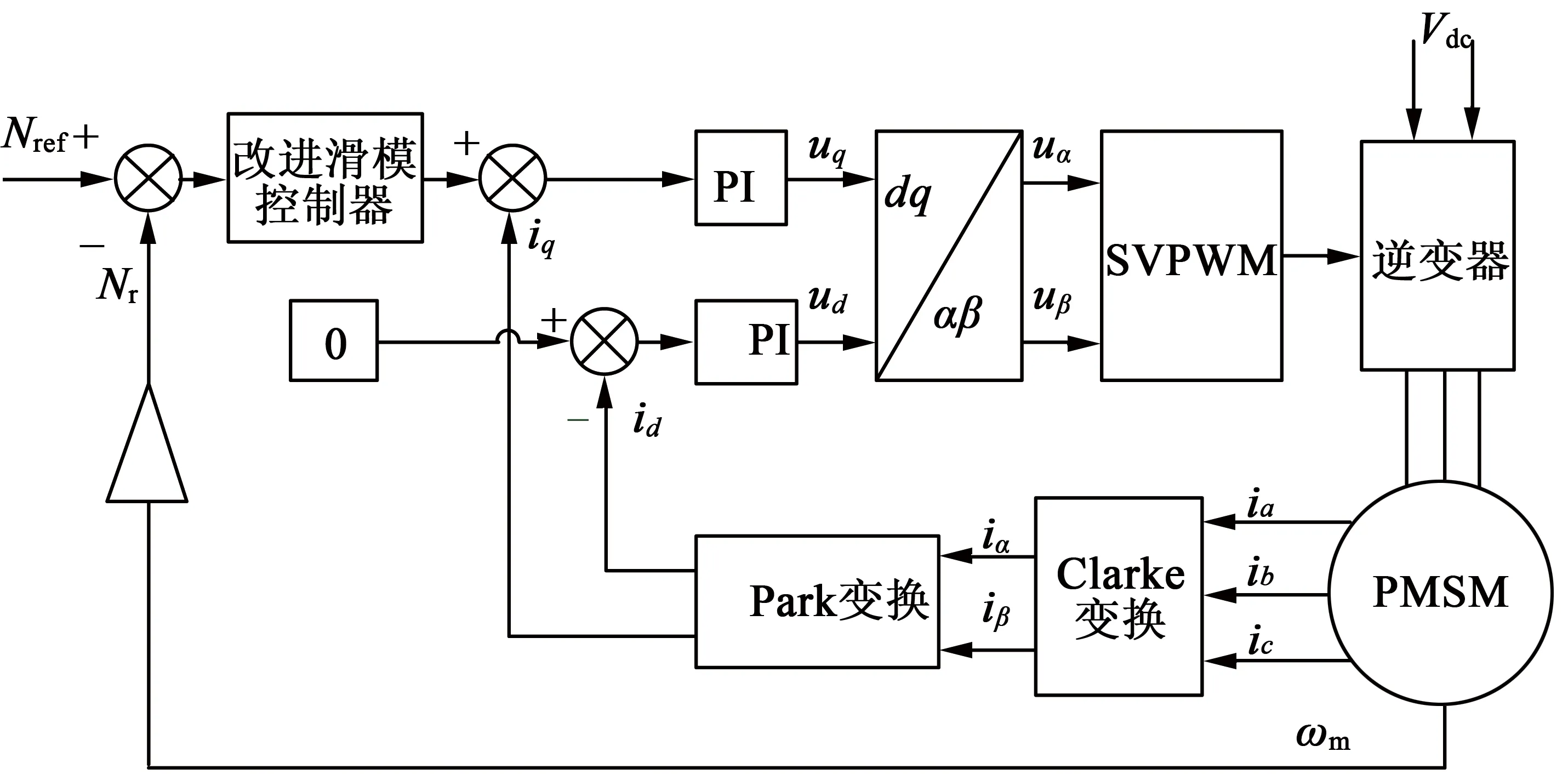
图4基于变指数快速幂次趋近律速度控制器的PMSM调速系统框图
上述三种控制方法的电流控制器均采用PI控制器,并且参数相同。仿真总时间为0.3s。仿真步骤如下:初始给定转速200r/min,电机起动时负载转矩为2N·m;在0.1s时,给定电机转速600r/min;在0.2s时,电机负载由2N·m变为5N·m。
本文所设计的趋近律控制方法参数如下:k=2,εc=200,qc=200,α=18,β=0.5,λ=0.5;指数趋近律控制参数如下:c=55,εb=200,qb=300;PI控制器中比例增益kp=0.05,积分增益ki=0.25。
转速响应曲线如图5所示。从图5(a)可知,当电机以给定速度起动时,PI控制有超调,并且响应一段时间才能恢复到给定转速;指数趋近律控制虽然无超调,但趋近速度慢;变指数快速幂次趋近律趋近速度快,无超调。从图5(b)可知,变指数快速幂次趋近律虽然都有一定量的超调,但是比PI控制、指数趋近律控制小得多。
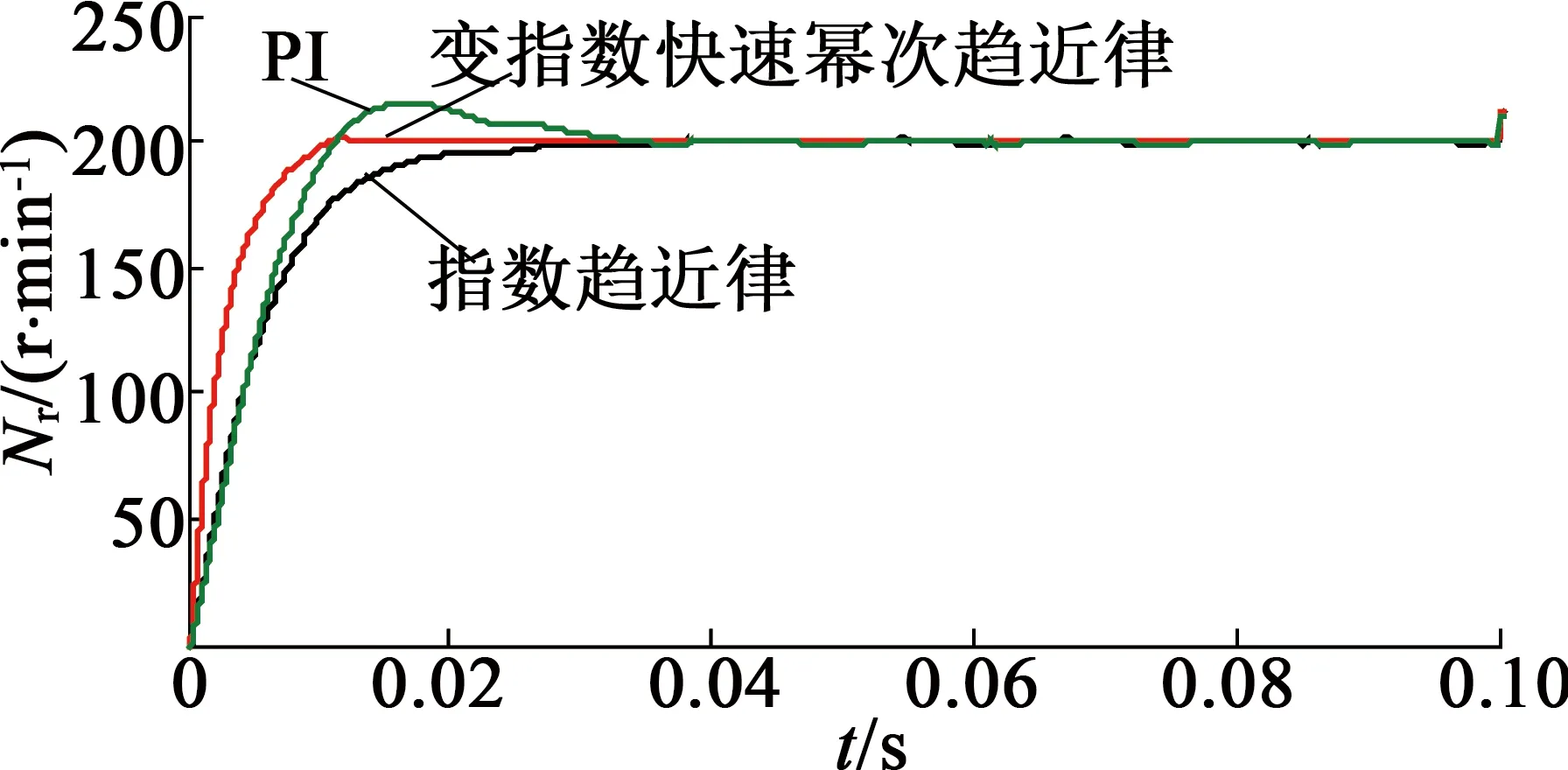
(a) 0~0.1 s转速响应曲线

(b) 0.1~0.2 s转速响应曲线
图5给定速度变化时转速响应曲线
负载转矩变化时转速响应曲线如图6(a)所示,图6(b)是0.25~0.29s转速响应曲线放大图。从图6可知,变指数快速幂次趋近律控制时受扰动量小,在速度稳定时抖振小。

(a) 0.2~0.3 s转速响应曲线
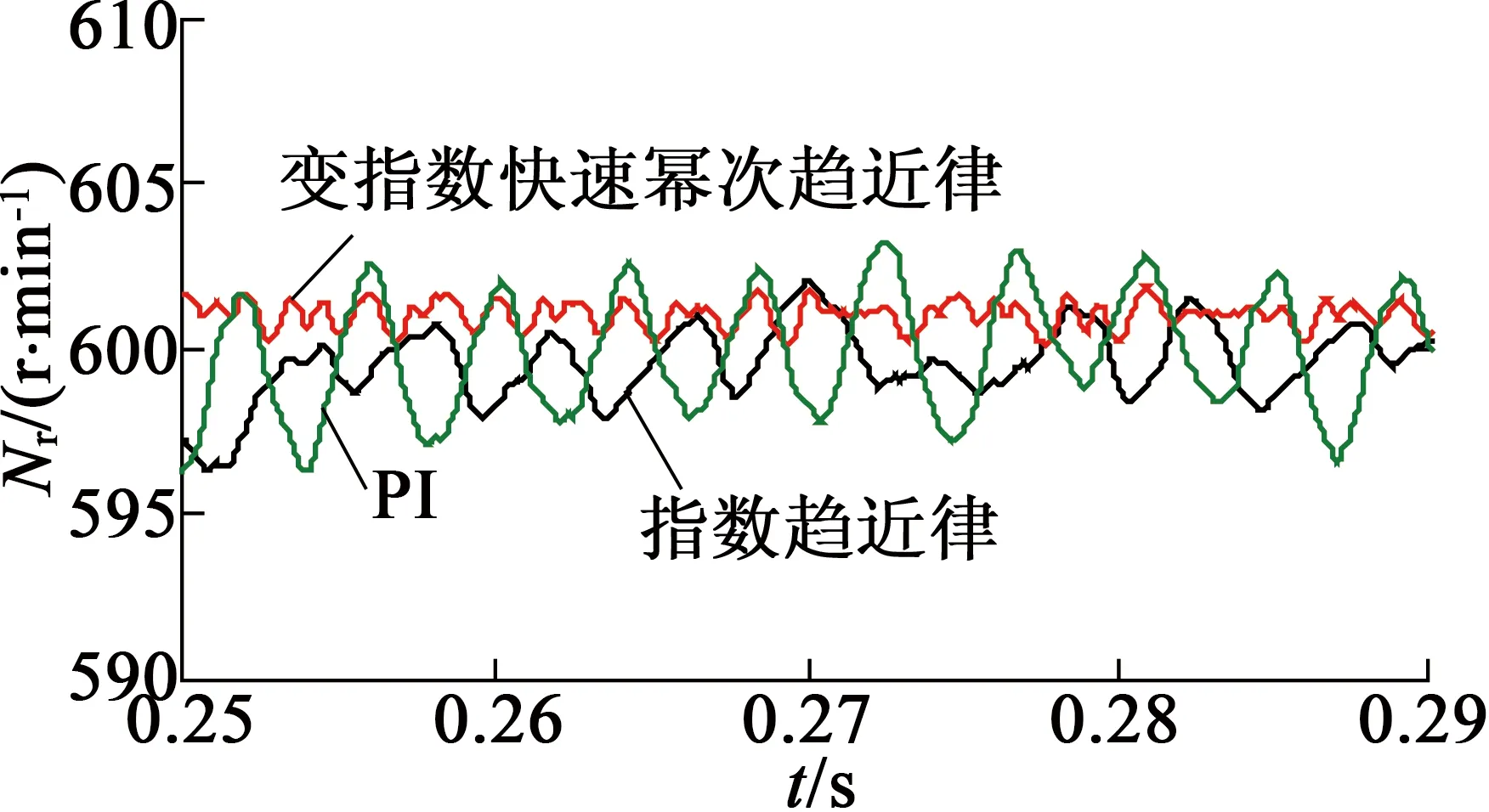
(b) 0.25~0.29 s转速响应曲线
图6负载变化时转速响应曲线
为了更好地比较仿真结果,以速度响应无超调、响应时间更短为评价标准,从转速响应曲线得到速度响应评价表,如表2所示。表2中的数据进一步说明了变指数快速幂次趋近律控制响应速度快,鲁棒性强。

表2 速度响应评价表
5 结 语
针对传统趋近律趋近速度慢,滑模变结构中固有抖振影响转速系统性能的问题,设计了变指数快速幂次趋近律的控制方法。在变指数幂次趋近律的基础上加入纯指数项和含有e-μ|s|的函数,使系统状态在远离滑模面时趋近速度快,在滑模面运动时抖振小。基于变指数快速幂次趋近律,设计了积分滑模速度控制器,用Lyapunov函数证明了控制器的稳定性。在PMSM矢量控制系统中,该控制器与传统指数趋近律控制器和PI控制器进行了仿真对比。结果表明,变指数快速幂次趋近律速度控制器在跟踪速度、抑制抖振和消除外部负载扰动的影响等方面有较好的动静态表现,具有较强的鲁棒性和自适应性。