轮椅床机构及人机一体化模型研究
2019-03-28
(天津市先进机电系统设计与智能控制重点实验室,天津 300384)
0 引言
中国目前已经进入快速老龄化的阶段,老龄化问题日益严峻,失能老人的照顾护理成为我国老龄化所面临的最大挑战之一。我国的国情和社情决定了中国老人主要的养老方式是居家养老。随着生活质量的提高,对养老服务和保障在智能化、柔性化、差异化提出了更高的要求,本文针对失能老人的护理最为重要的轮椅床的抬背位姿变换进行研究,将人体简化模型与动力机构进行一体化建模,研究人机一体化模型,解决在位姿变换过程中的柔性化问题,研究人体在位姿变换的过程中身体各个部位挤压和相对于床面的滑动问题,最终使得位姿变化人性化、舒适化[1~3]。
长期卧床的老人,由于身体机能退化,行动不便,无法自主进行位姿变换,身体部位长期受到压迫,导致压疮的产生,传统轮椅床、护理床多采用机械机构带动床板转动来改变身体位姿,由于床板和人体之间有一定的距离,位姿变换会带来挤压、滑动,造成身体产生剪切力与摩擦力,局部组织受到剪切力导致的损伤会更容易诱发压疮的产生,危害老年人的身体健康。本方案针对这一问题,采用机械机构与柔性气囊装置结合起来的思想,机械机构保证位姿变换的安全稳定,柔性气囊装置调节人体部位的受力方向与受力面积,改变人体与床板的相对位置,实现柔性化位姿变换,根据人机一体化模型得到的人体位姿变换参数,调节气囊的状态,减小人体在位姿变换过程中的滑动,调节人体各个部位的受力状况,实现位姿变换的柔性化与智能化[4,5]。
1 轮椅床方案
本设计方案立足于老年人日常养老的需求,集成了位姿变换、床椅分离、二便处理功能,整体结构如图1所示,增强老人独立生活的能力,减轻社会和家庭负担。针对目前护理床、轮椅床位姿变换的机械化问题,本设计方案采取机械机构变换结合柔性气囊装置共同进行老人的位姿变换,通过与人机一体化模型结合,实现柔性化的位姿变换。

图1 轮椅床整体结构
抬背屈腿位姿变换由机械机构和柔性气囊装置协作完成,机械机构带动床板翻转,柔性气囊装置调节人体与床面的距离、接触角度与接触面积。机械机构承担人体重量,在电推杆伸缩下,带动床板转动,进行位姿变换,柔性气囊装置通过改变身体部位的受力方向及受力状况,基于下文所研究的人机一体化模型,根据人体各个部位的运动学、动力学参数及关键部位的受力,分析得到最为合理的位姿变换状态,调节电推杆和柔性气囊装置,使得位姿变换柔性化与智能化,变换成坐姿姿态后,可进行床椅分离、二便处理、释放身体局部压力功能。整体结构如图2所示。

图2 抬背曲腿位姿变换
轮椅床经过位姿变换呈坐姿姿态,左侧床板打开,由床的一侧分离出来进行,扩展老人的生活空间。床体分离如图3所示。

图3 床椅分离示意图
人体变换到坐姿姿态,将设计的智能马桶集成在轮椅床一侧下方的中间位置,通过平移抬升机构运送到人体臀部位置,臀板打开,进行二便处理。
柔性气囊装置,本方案采取嵌入式气囊位于床垫中对应人体的腰部、背部、肩部、颈头部。气囊为两层结构,可调节与对应部位接触的角度,小气囊阵列可以做到调节变化的柔性与精准。如图4所示。
2 人机一体化模型和运动计算
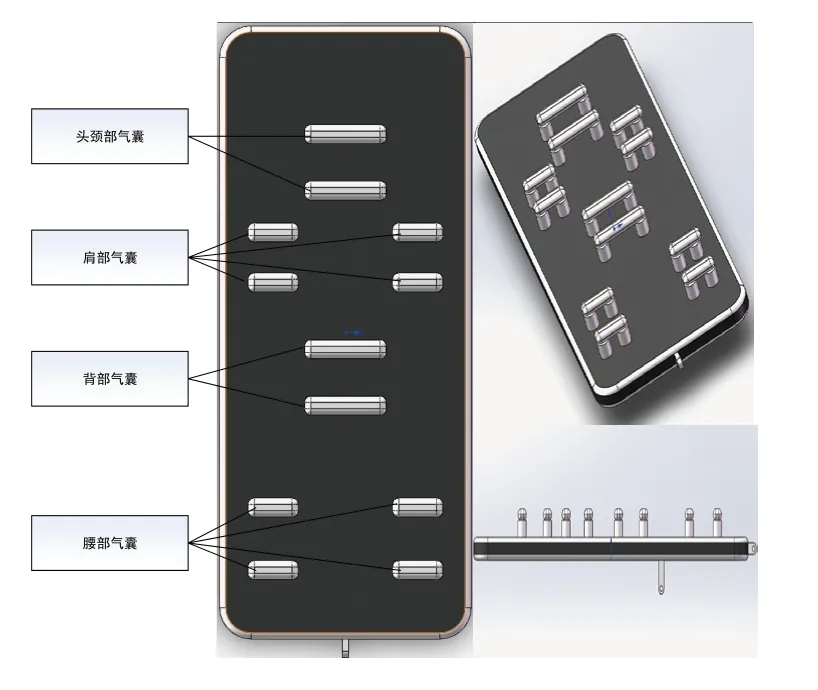
图4 柔性气囊装置
目前的轮椅床、护理床的运动学、动力学模型仅仅考虑到机械机构,没有考虑到人体在位姿变化过程中的受力、滑动,人体各个部位在不同位姿状态下对于其他部位的压力也没有考虑[7~10]。一些学者采用附加的机构来,如腰部提升、背部随动的方式来减小人体的滑动[6],但是并未考虑到人体的差异化,并且机构的变化也是刚性的,无法与人体上半身的弯曲进行匹配,柔性化问题无法解决。本文研究在位姿变换过程中的人机一体化模型,将机械机构、人体、柔性气囊装置联合建模,充分考虑到人体在位姿变化所受到的影响,将人体的的滑动、受力状态用柔性气囊装置来调节,对腰部、背部、肩部、颈头部单独调节状态,做到位姿变化的安全、稳定,并且兼顾柔性化与舒适性。
2.1 人机一体化模型的组成
1)机械连杆模型,将机械机构和床板简化为连杆铰链模型,电推杆带动床板转动改变人体的位置姿态,以电推杆为原动件,分析床板转动的角度、角速度、角加速度变化。分析机械机构的稳定性,以设计的轮椅床参数为基准,建立模型,得到床板运动参数的表达式。
2)人体连杆铰链质量块模型。轮椅床、护理床的位姿变换不同于外骨骼等技术的人机协作[11,12],由于老人身体机能的退化,位姿变换多为被动接受,身体相对于正常人要更加柔软,需要考虑机械机构在可能对人体的一些影响,自身各个部位由于重力因素造成的挤压也需要考虑其中。人体可以简化成为连杆质量块模型,各个部位之间铰接,腿部、脚踝、臀部之间的可简化为连杆铰链,腰部、背部、颈部、头部由于在位姿变换过程中会有很大的角度变化、不能将上身看做一个整体,将其分别作为质量块、连杆铰接。
3)柔性气囊、床垫作为连接介质的连杆铰接模型:由于人体与床面有一定的距离在位姿变换的过程中会有一定的相对移动,会造成挤压、局部组织错位,容易诱发多种疾病,错位所产生的剪切力还会极大诱发压疮的产生。柔性气囊装置采用改变气囊状态的方式改变人体各个部位相对床板的位置,受力方向和受力面积,每个部位的阵列气囊状态的组合变化简化为伸缩连杆。
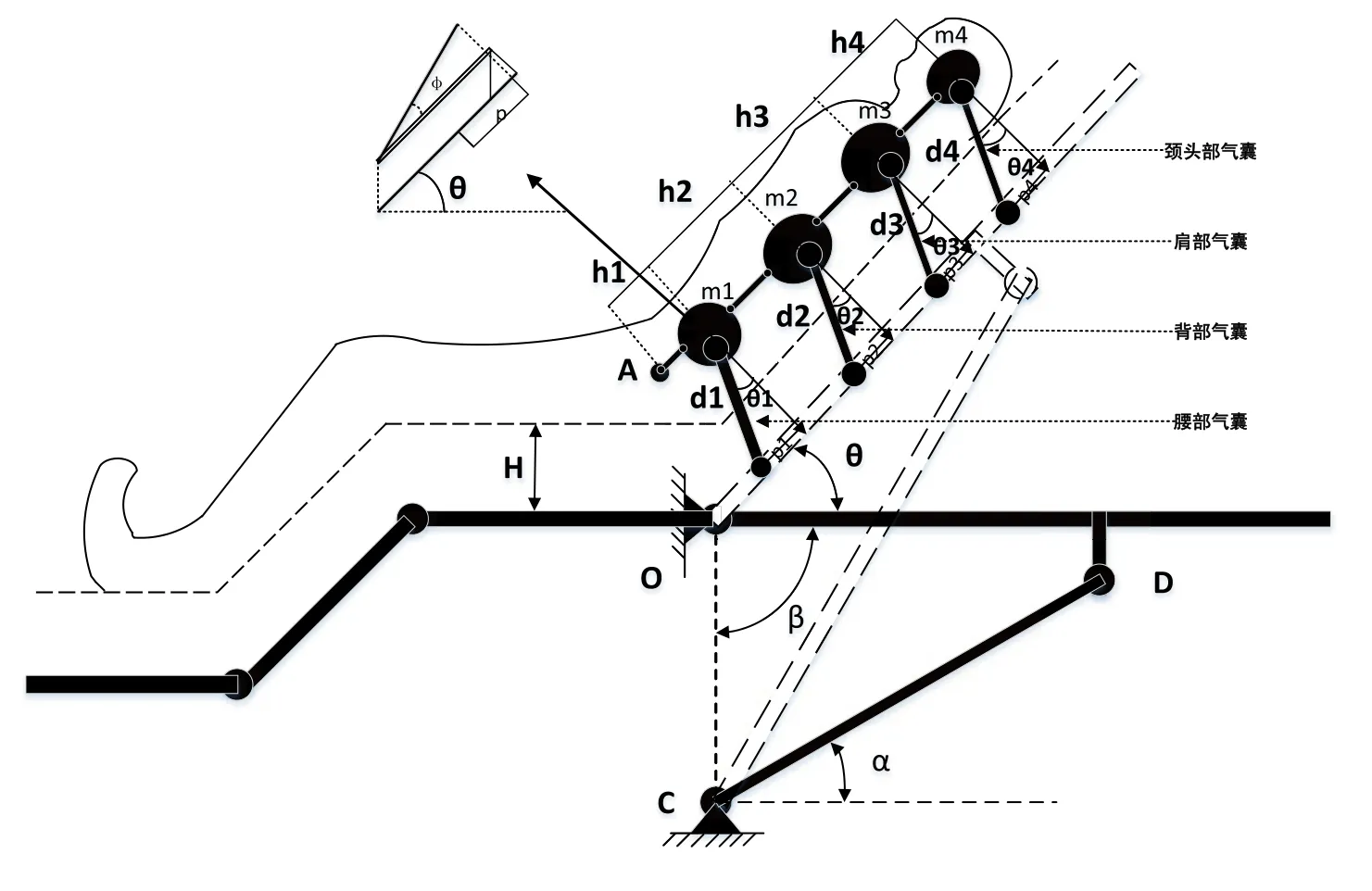
图5 人机一体化模型图
2.2 抬背模型
抬背屈腿位姿变换模型包括三部分,机械机构,人体简化模型。人体与床面的接触模型。将三者做一个简化,将人体分为以下部分,臀部与大腿由于在抬背屈腿位姿变化过程中保持不动,将臀部大腿固定在臀板上,在下方铰接小腿,小腿铰接脚部。上半身分为腰部、背部、双肩双臂,颈头部。腰部以连杆质量块铰接在臀部上,背部和双肩、双臂铰接在腰部。颈头部铰接在肩部,人体以臀部A点为固定点,腰部铰接在A点上,水平距离为h1,腰部气囊简化为连杆d1,与床板的变化角度为θ1。背部铰接在腰部,水平距离为h2,背部气囊简化为连杆d2,与床板的变化角度为θ2。肩部铰接在背部,水平距离为h3,背部气囊简化为连杆d3,与床板的变化角度为θ3。颈头部铰接在背部,水平距离为h4,颈头部气囊简化为连杆d4,与床板的变化角度为θ4。
由于机械机构和柔性气囊装置在位姿变换过程中运动较慢,可以假设在位姿变换的每一时刻,人体都处于静力学状态,腰部、背部、肩部、颈头部的质量分别为m1、m2、m3、m4。人体与床板的距离为H,代表床垫对人体与床板的间距,人机一体化模型图如图5所示。
2.2.1 机械机构分析
对床板进行分析,由:

由欧拉公式eiγ=cosγ+isinγ得:

式中β=90°,LOD=322mm,LOC=220mm,电推杆LCD的初始值为390mm,LCD=vt+390,v表示原动件电动推杆的伸长速度。将式(1)对运动时间t进行求导,得到:

由于电推杆CD转动速度变化较小,ω'可取均值0.0486rad/s。对式(1)对运动时间求二阶导可得到床板转动的加速度α1。
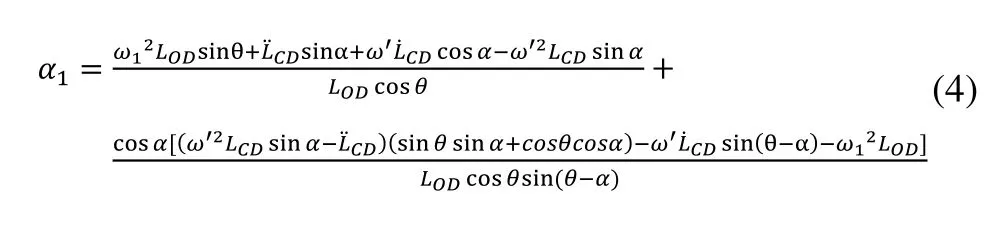
α初始值为34.34°。
2.2.2 人机一体化模型分析
人体与床板的距离H为150mm,各个部位气囊的初始长度等于H。气囊调整身体各个部位相对于上一部位的角度分别为腰部φ1,背部φ2,肩部φ3,颈头部φ4,在整个位姿变化的过程中以φ1=5°,φ2=5°,φ3=5°,φ4=5°进行计算,此角度可根据使用者的需求修改。
身体各个部分受力情况如下,床板的支持力为F,垂直于床板,颈头部重力为G4,柔性气囊的支持力为f1。肩部、背部、腰部受力类似颈头部,将重力沿着床板方向进行分解,使得各个部分达到静力平衡,减小对其他部分的压力,如图6所示。
调节柔性气囊的推力及与床板的夹角可以使人体各个部位在位姿变换过程中减少挤压,机械机构带动床板转动所产生的推力为:
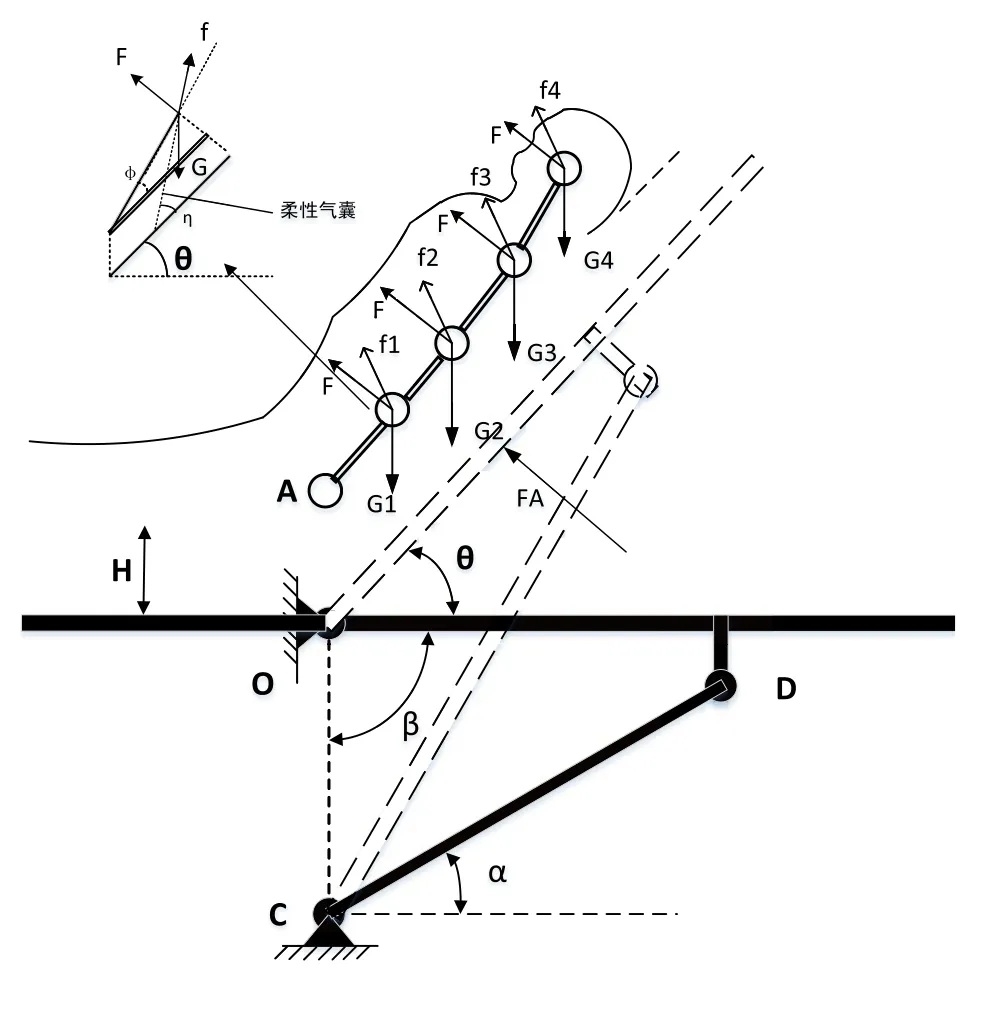
图6 人机一体化模型受力分析图

由于人体的差异化问题[13~15],按照人体质量分布,以75kg成年男子为例,颈头部为5.8kg,肩部15kg,背部11.25,腰部11.25kg,G为人体上半身的重力,G=G1+G2+G3+G4=424.34N。
床板对人体上半身的各个部分推力分别为F1、F2、F3、F4,床板提供90%的支持力,气囊提供10%的垂直于床板的支持力。
对于腰部气囊的推力和角度进行计算。
联立求解得腰部气囊推力f1,与床板夹角η1:
背部气囊推力f2,与床板夹角η2:


肩部气囊推力f3,与床板夹角η3:
颈头部气囊推力f4,与床板夹角η4:
在抬背位姿变化过程中,随着床板的转动人体各个部分沿着床板的运动向上滑动,柔性气囊装置不同部位气囊的角度调节会减小这一趋势。
腰部沿床板移动:

背部沿床板移动:

肩部沿床板移动:

颈头部沿床板移动:

3 仿真分析
利用MATLAB对床板进行运动分析,分别得到的床板角度、角速度、角加速度变化如图7所示,角度范围满足设计的0~90°要求。角速度范围控制在1.7~5.5°之间,床板在0~90°转动过程中的理想平均角速度为4.5°/s,本方案角速度变化更加合理,前半段角速度由1.7~4°平稳增加,人体受床板垂向支持力较大,较小的角速度有利于减小对人体的压迫感,后半段角速度由4~5.5°平稳增加,随着床板转动角度增加,人体受床板垂向支持力逐渐减小,角速度增大以加快床板转动过程。角加速度变化范围0.14~0.34°/s2,变化范围较小,且数值变化平稳减小,无突变。本设计方案符合上述要求,机械机构的尺寸参数的选取是合理的。
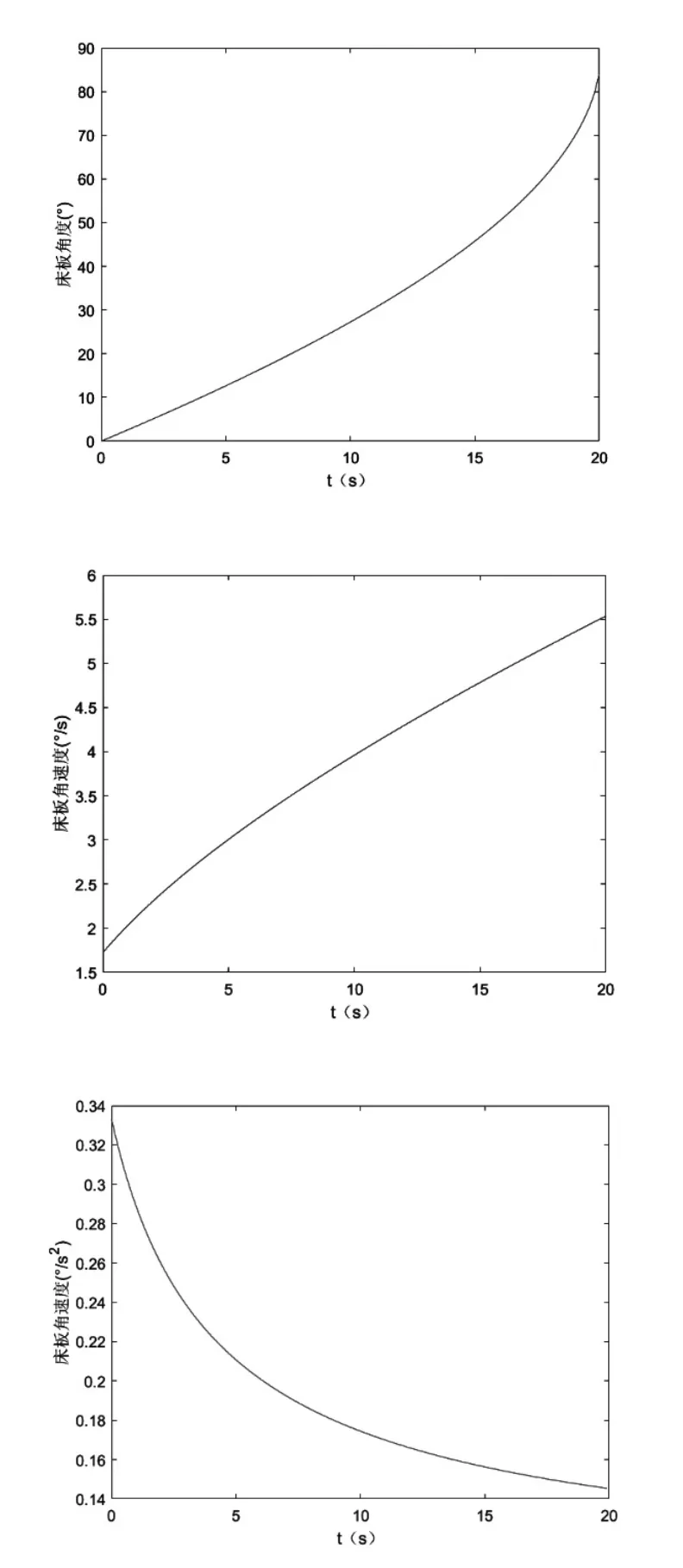
图7 床板的运动学参数
随着床板的转动,腰部、背部、肩部、颈头部气囊推动身体对应部位协助完成抬背位姿变换, 颈头部气囊在20s的抬背位姿变化过程中推力变换为94.8~100N,与床板夹角变化为90°~69°,如图8所示,肩部气囊推力变化为245~263N,与床板夹角变化为90°~66°,如图9所示,背部气囊推力变化为187~205N,与床板夹角变化为90°~63.5°,如图10所示,腰部气囊推力变化为187.5~208.5N,与床板夹角变化为90°~61°,如图11所示。在抬背位姿变换过程中,各个气囊推力变换平缓增加,与床板夹角变换较为平稳,通过控制充入气囊的气体可以实现这一过程,整个过程为单一充气,减少因充放气所造成的身体震动。腰部、背部、肩部、颈头部气囊减少了各身体部位对其他部位的挤压,将人体的重量分散到多个气囊共同支撑,协同调节气囊使得柔性气囊装置更加贴合人体曲线,实现抬背位姿调节的柔性化与舒适性。
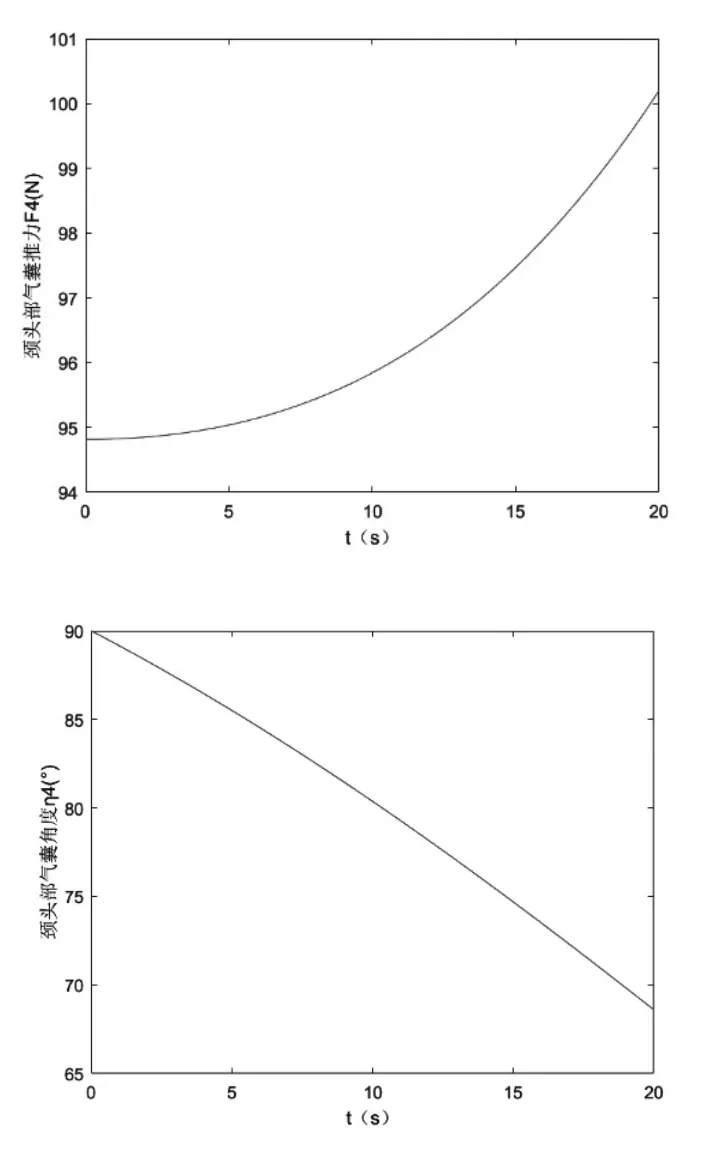
图8 颈头部气囊推力和角度
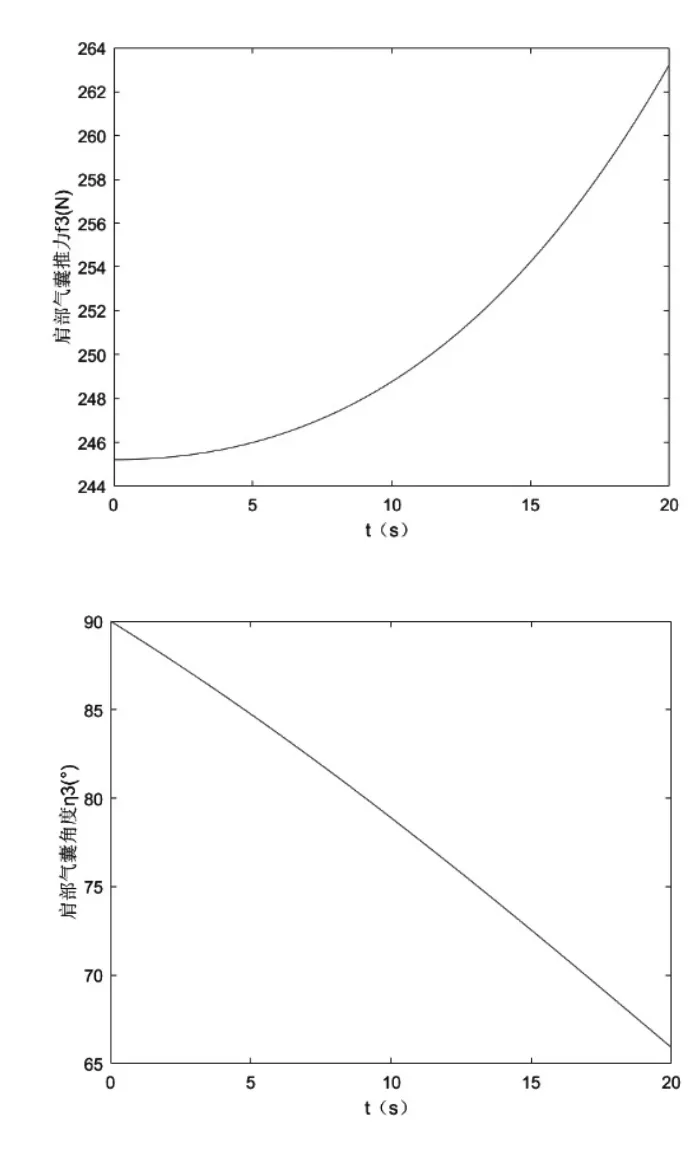
图9 肩部气囊推力和角度
4 结束语
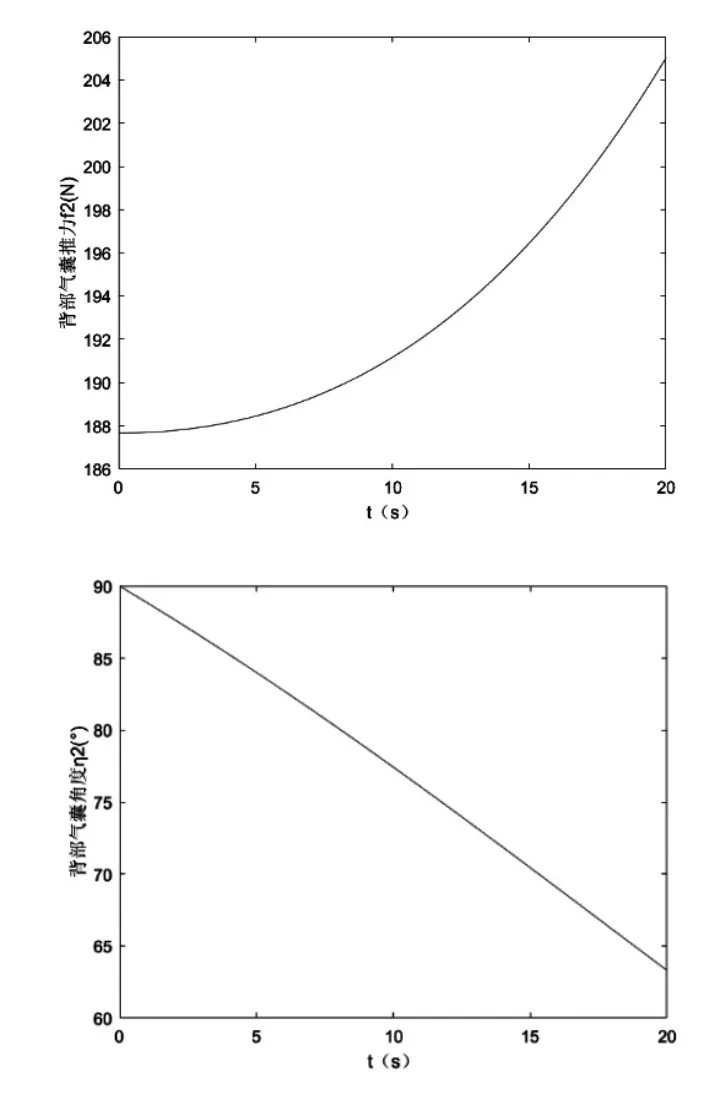
图10 背部气囊推力和角度
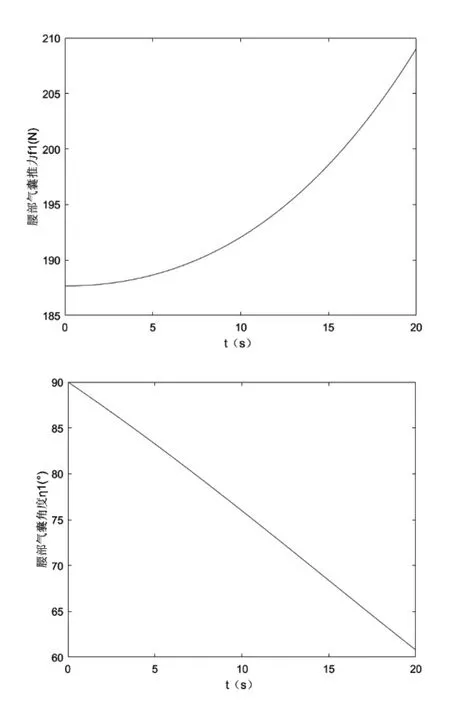
图11 腰部气囊推力和角度
本文的轮椅床方案机械机构运动可靠,柔性气囊装置减少了人体各个部分的挤压,使得抬背位姿变换柔性化,采用三维软件SOLIDWORKS进行建模,并对机械机构和柔性气囊装置进行理论分析,MATLAB仿真计算得到的曲线进一步验证了设计方案和人机一体化模型的合理性,满足了位姿变换的柔性化与舒适性,柔性气囊对于身体颈头部、肩部、背部、腰部的分别调节更加契合人体曲线。下一部分将开展人体压力数据的工作,将根据使用者的具体身体参数,对人机一体化模型进行修正,使得轮椅床的位姿变换更加智能化、柔性化,并解决人体的差异化问题。
