预警机支援下的地空导弹杀伤区远界研究
2019-03-28吴小鹤李彦宽代进进唐嘉钰
吴小鹤,李彦宽,代进进,唐嘉钰
(1.海军航空大学, 山东 烟台 246001; 2.烟台北方星空自控科技有限公司, 山东 烟台 264003)
随着国际军事形势不断激化,我国领海面临的威胁也越来越严峻。加之现代武器的发展和空袭战术的多样化,在要地防空和岛礁防御中,对抗低空超低空目标的作战能力需求迫在眉睫。根据目标防区外发射、低空飞行等特点,单平台单火力的防御作战模式无法满足作战需求,结合地空导弹的防御性能,在预警机深度探测的支援下,能够使得地空导弹性能扩大化。由于在预警机支援下单平台的地空导弹系统实现了解耦,因此传统单平台导弹射击诸元计算方法不再适用这一新的作战形式。针对这一类问题,诸多学者从空舰协同、舰舰协同等方面对导弹杀伤区进行了进一步分析,而针对空地协同的杀伤区研究比较欠缺。文献[1]讨论了舰舰协同在编队防空中舰空导弹杀伤区问题,从杀伤区配置和不同纵深进行了建模分析。文献[2]指出舰载直升机与舰空导弹协同下目标航路捷径可增加150%。文献[3]实现了动态火力下多平台组网,使得地空导弹在合理部署火力单元位置情况下扩展了杀伤区远界,各项射击诸元得到了相应的提高。文献[4]对预警机引导编队协同作战进行了仿真分析,可供实际作战参考。本文以一体化防空作战体系和预警机协同下中远程地空导弹反导作战过程为背景,基于等角航线[5]的目标模型,构建杀伤区坐标模型,分析影响预警机支援下地空导弹杀伤区远界因素,给出杀伤区远界点的计算方法。
1 坐标系及目标模型
1.1 单平台杀伤区
在评估一个防空导弹武器系统时导弹的杀伤区是一项最重要的指标之一,它能够直观地体现武器系统的综合作战性能,其决定了导弹应具备的射程、高度和航路捷径[6]。杀伤区即指地空导弹武器系统以不低于某一给定概率杀伤空中目标的导弹与目标遭遇的空间范围[7]。显然地,在杀伤区空域内各点导弹杀伤目标的概率并不一致,但必然不低于一个最低定值。地空导弹杀伤区的形状和大小取决于导弹自身的物理特性、目标运动特性及战场环境。
就平台武器系统而言,传统假设目标做等速直线运动迎面空袭我方目标,以地面直角坐标系为基准构建迎区杀伤区,杀伤区空间形状如图1所示。

图1 单平台地空导弹杀伤区空间形状

1.2 地空协同杀伤区坐标
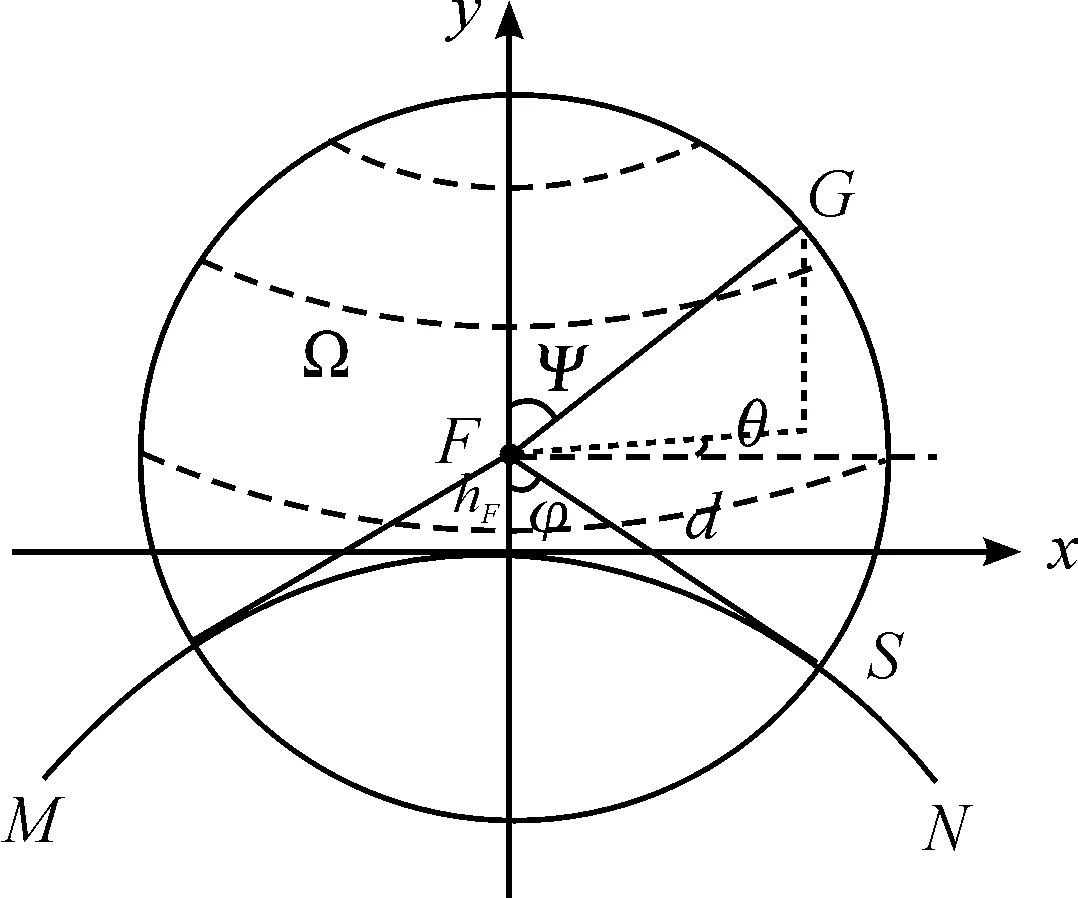
在现代战争中,目标空袭多采取防区外发射,近距离时采取低空超低空突防。为此必然要重点考虑到地球曲率对拦截目标的影响,传统简单的认为目标做等速直线运动显然不符合实际战场环境。因此,根据地球曲率的特点和实际分析情况,可以视目标在距离地面某一高度进行等角航线运动,即目标保持某一航向,且运动轨迹在地球表面的投影同各子午线的夹角相等[8]。基于目标等角航线运动构建的协同杀伤区坐标系如图2所示,该方法避免了传统坐标系随目标运动而变化,更适用于当前战场环境。
图2中假设目标在地球表面上运动时等高等角航线,在地心坐标系OdXdYdZd之上,以地空导弹系统火力单元为原点O,Ox轴平行于水平面,且北偏东β角为正方向,Oy轴沿地球半径方向垂直向上,由右手定则确定Oz轴。
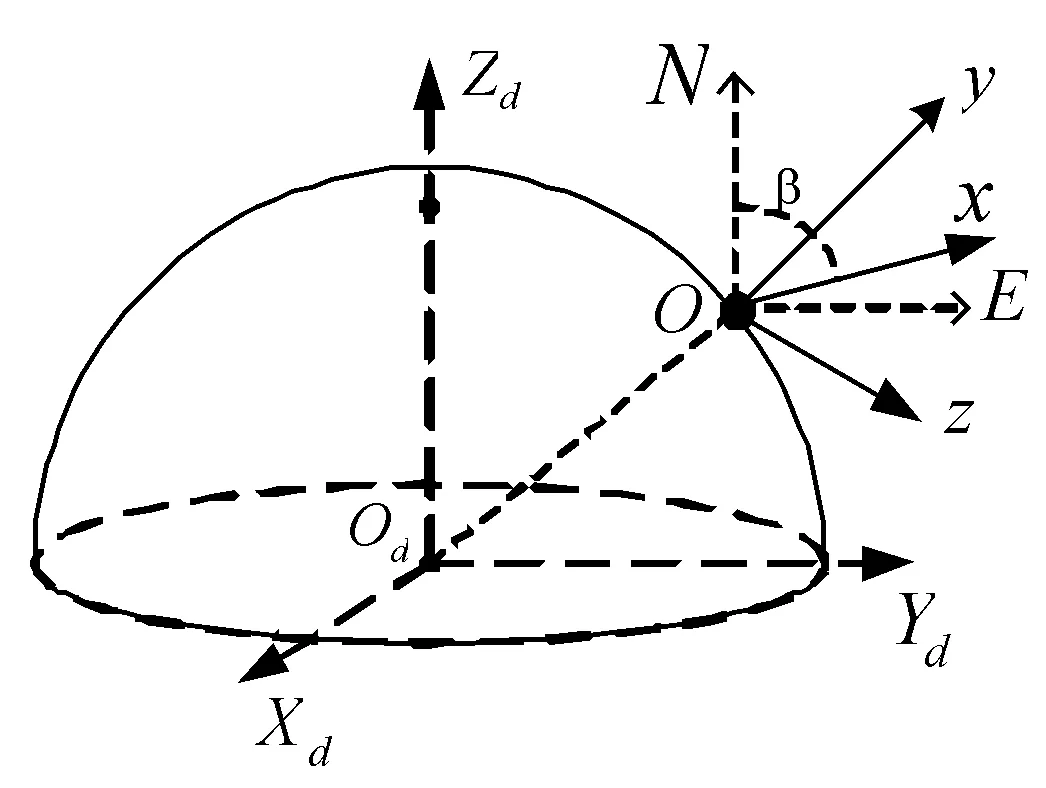
图2 协同杀伤区坐标系
1.3 目标等角航线运动模型

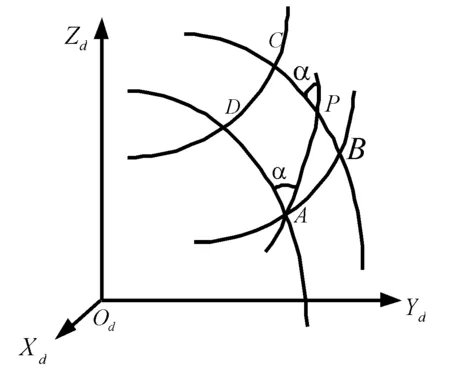
图3 目标等角航线运动微分三角形
其中,ABCD所在的弧线为经纬线,AP为目标运动等角航线。在微分三角形ABP中,有微分量AP=ds,AB=NcosBdL,BP=MdB,且有微分方程为:
cosαds=MdB
(1)
sinαds=NcosBdL
(2)
(3)
方程中的M为子午线曲率半径,N为卯酉圈曲率半径。假设目标在AP段等角航线运动时间为s,经过对微分方程式(1)-式(3)的计算分析,可得:
LTts+1-LTts= tanα(qP-qA)
qP= arctanh(sinBTts+1)-earctanh(esinBTts+1)
qA= arctanh(sinBTts)-earctanh(esinBTts)
e为地球的第一偏心率。点P的纬度可根据文献[5]的子午线弧长反解公式直接求出,即:
其中φ、ai(i=2,4,6,8)的取值可参考文献[5]。

2 协同杀伤区的计算方法
在预警机支援下地空导弹超视距拦截低空超低空目标作战过程中,根据作战任务和预警机引导模式,预警机参与导弹从准备到命中的全过程。因此,杀伤区必然随着预警机的介入而发生变化,杀伤区实质是弹目遭遇点的空间集合,影响杀伤区的主要因素有导弹最大飞行斜距、雷达制导跟踪距离等。地空导弹在预警机协同制导下能够摆脱地面雷达的限制,而预警机的介入也使得地球曲率造成的影响很小甚至可以忽略。此时杀伤区的变化主要是跟踪制导能力得到了进一步加强,杀伤区远界也随之发生变化。
2.1 跟踪探测能力
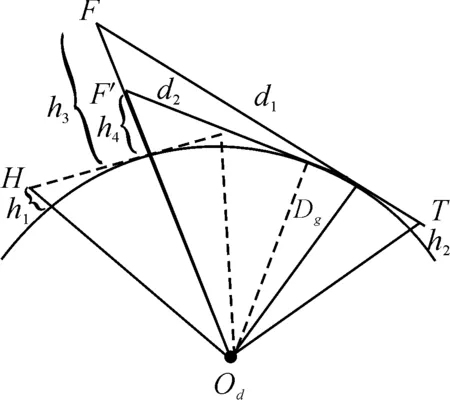
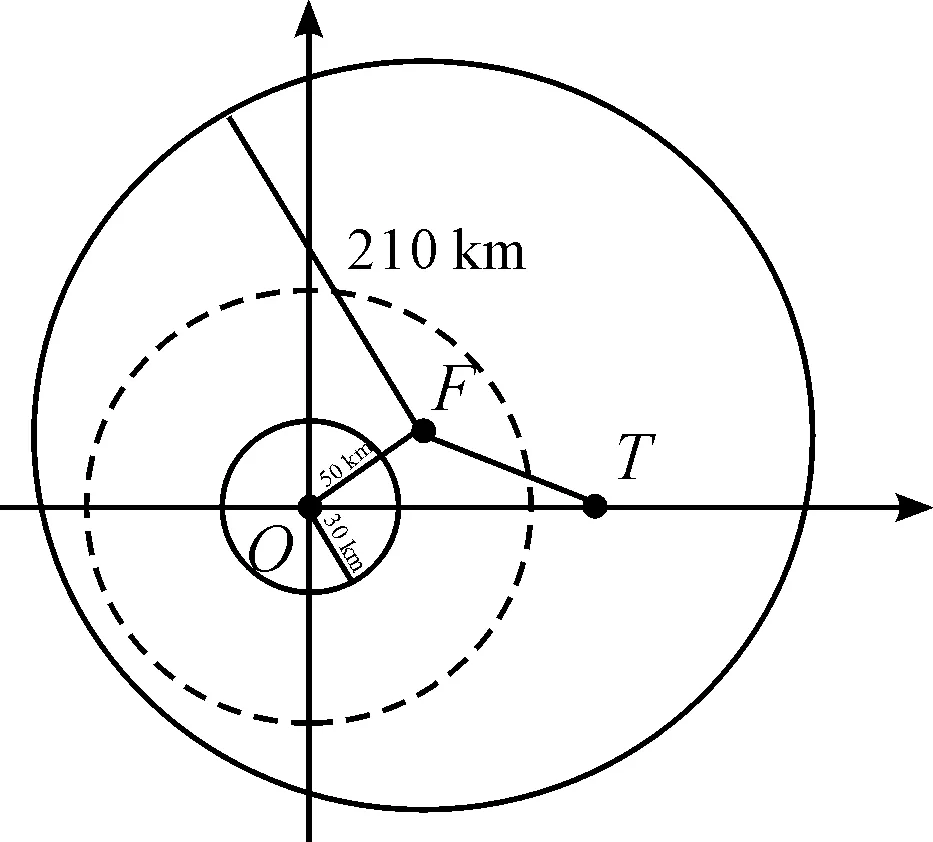
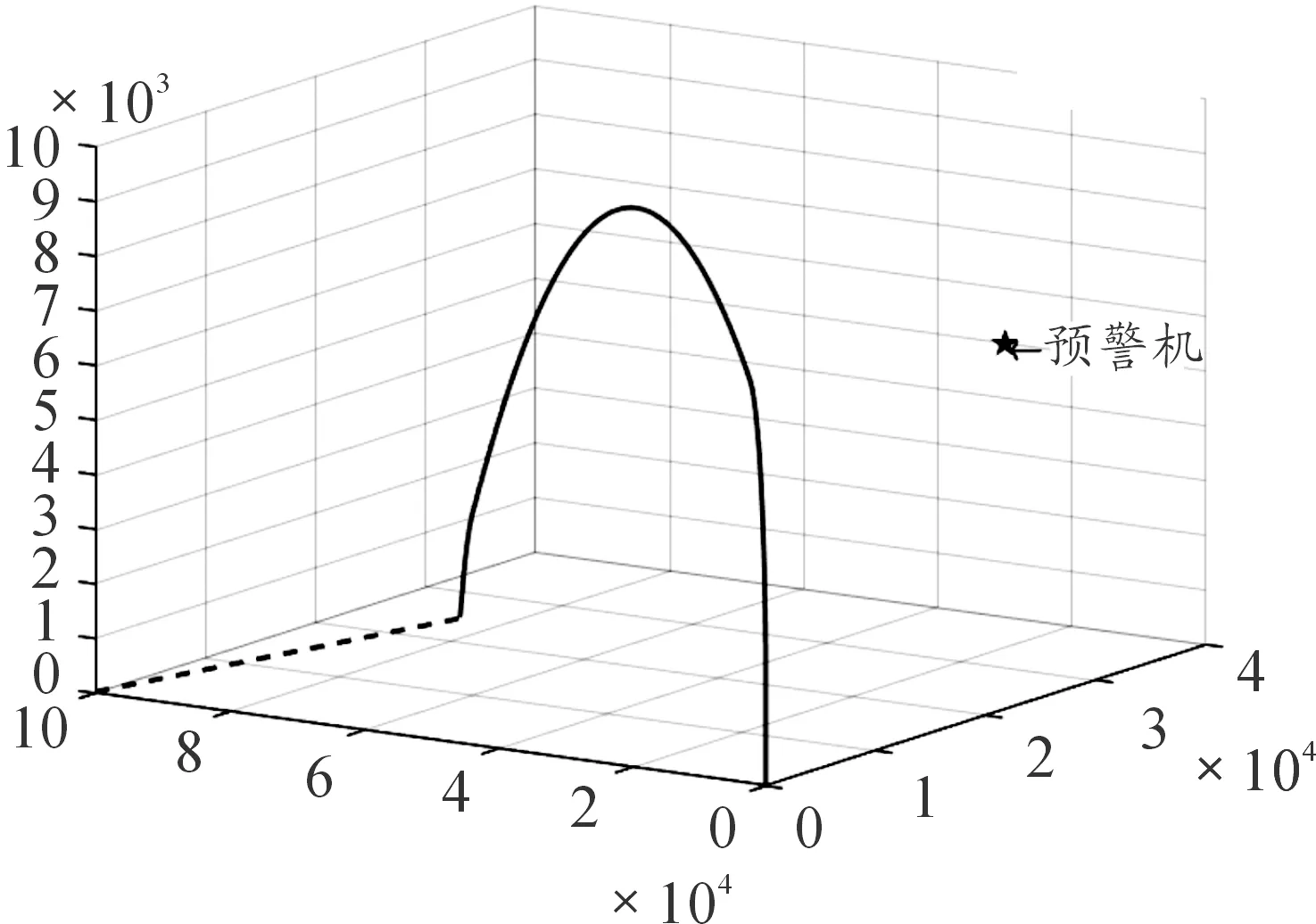
预警机和地空导弹武器系统组成的作战单元,可以满足超视距作战任务的需求。由于雷达在不同高度所达到的最大作用距离不同,因此有必要先对预警机位置进行分析。假设地空导弹武器系统为一个点,即发射车和雷达车之间的距离忽略不计,则各平台在水平面上的位置关系如图4所示。火力圈以导弹发射点为中心,半径为导弹最大射程DH;雷达圈以地面武器系统雷达车为中心,半径为雷达最大作用距离DL。预警机圈以预警机在水平面的投影为中心,半径为机载雷达最大作用距离DY。3个范围圈的大小关系是DL 图4 水平面位置关系 垂直平面上预警机、导弹武器系统和目标在地心坐标系上的位置关系如图5所示。其中H为导弹发射位置,高度h1;T为目标位置,高度h2;F(F′)为预警机位置,飞行高度h3(h4);地球半径为De。明显地,地球曲率的存在产生了雷达盲区,而雷达直视距离可表示为[10] 图5 垂直面位置关系 图6 跟踪探测作用范围 在雷达跟踪探测范围足够大或者不考虑雷达作用距离的情况下,杀伤区主要受导弹最大飞行斜距限制。最大飞行斜距与导弹性能参数有关,主要涉及最大飞行时间和发动机工作时间,两种时间的计算可通过导弹弹道解算得到。根据弹道解算得到导弹速度变化曲线,对速度曲线在时间上进行积分运算即可求得导弹的斜射程,再对不同高度的弹道进行计算,即可得到相应的斜射程与高度的关系曲线,最后考虑最大飞行斜距的限制,就能够得到在斜距限制下的杀伤区远界。 杀伤区远界的确定首先要明确是哪个因素对计算产生了限制,主要是预警机支援下跟踪探测范围限制和导弹最大飞行斜距限制。若跟踪探测范围空间大于导弹飞行距离,则杀伤区远界受最大飞行斜距限制,相反地,杀伤区远界由跟踪探测范围主导。根据预警机支援下导弹超视距拦截低空超低空目标的作战任务和目的,通过兵力部署和阵地配置实现预警机支援下的跟踪探测范围足够大,使得杀伤区远界受导弹最大飞行斜距限制。假设现有某型地空导弹武器系统,导弹弹道解算模型已知,且目标参数由预警机确定,各项初始条件均已知,具体杀伤区远界计算步骤如下: 步骤2:根据战场环境、任务需求,针对目标特性确定预警机高度和前出距离,计算跟踪探测空间Ω。 步骤3:若导弹到达步骤1确定的远界点时目标飞出范围Ω,则导弹无法命中目标,回到步骤1。否则执行步骤4。 步骤4:确定导弹发射时刻,预警机稳定跟踪目标并制导导弹飞行,弹目最终遭遇点为杀伤区远界。重复步骤1。 在导弹最大飞行斜距限制下,通过不同的目标特性分析和预警机配置得到一系列杀伤区远界点,并组合成杀伤区远界曲面。 参数假定:设某地空导弹发射阵地位于东经116.8°,北纬23°,海拔高度100 m。以该阵地为坐标原点,假设阵地的跟踪制导雷达位置与发射阵地相同,雷达最大跟踪制导距离为30 km,地空导弹平均速度970 m/s,最大速度1 700 m/s;目标(以巡航导弹为例)等角航线运动的航向角为120°,低空飞行速度为300 m/s,目标初始位置经纬高为(118°,23°,25),雷达截面积σ=0.2 m2;预警机前出发射阵地50 km,初始经纬高为(117°,23.3°,5 000),机载雷达直视距离300 km,根据目标特性机载雷达的跟踪制导距离假设为直视距离的0.7倍,即210 km,则预警机不仅能够探测并制导发射阵地的导弹,还能探测跟踪远程低空目标,三者之间的位置关系示意图如图7。 图7 位置关系示意图 根据不同高度弹道仿真的结果简化出地空导弹飞行斜距随目标高度变化曲线如图8所示,横轴为目标飞行高度,纵轴为最大飞行斜距。曲线oa为低空飞行段斜距的变化,a点高度6.5 km,ab高空段斜距不变,为110 km,b点高度为30 km。 图8 最大飞行斜距随目标高度变化曲线 设定总的反应时间为15 s,导弹最大过载为25 g,重力加速度g=9.8 m/s2,比例导引系数k=5,通过弹道仿真得到导弹与目标飞行轨迹如图9所示。 图9 导弹与目标飞行轨迹 目标飞行高度为25 m时,单平台发射阵地雷达圈DL最远跟踪点在Oxyz坐标系下的坐标为(27 464.03, 7 827.87, 9 309.43),其限制的杀伤区远界点坐标为L(22 430.02, 6 393.06, 9 122.38);预警机的跟踪探测范围远超过发射阵地雷达跟踪制导范围和武器系统最大火力范围,则在预警机支援下杀伤区受制于武器系统的最大火力范围,即导弹最大飞行斜距,坐标为(85 710.12, 24 429.34, 55.57),对应远界点斜距为89.12 km,如图10所示。显然,杀伤区远界在预警机的支援下的得到了较大的扩展,算例中杀伤区远界较单平台约扩展了3.5倍。 图10 杀伤区远界 分别对单平台和协同条件下采用蒙特卡洛方法进行50次抽样实验,实验装订了预警机雷达制导误差、系统误差标准差及随机误差,得到水平杀伤区等高杀伤概率分布,如图11所示。其中,图11(a)表示的是单平台水平杀伤区等高杀伤概率分布,可以得出单平台下杀伤区远界30 km左右,与弹道仿真结果相符;图11(b)表示的是预警机协同下水平杀伤区等高杀伤概率分布,可以得出协同条件下杀伤区远界在90 km左右,与弹道仿真结果相符。两者相比,明显地协同条件下远界得到了较大扩展。 图11 水平杀伤区等高杀伤概率分布 1) 通过对单平台杀伤区的分析,考虑实际地理环境影响,建立了等角航向目标运动模型,并构建了协同下杀伤区坐标系。 2) 为消除地球曲率的影响对预警机的位置进行了配置,并配合导弹发射平台到了探测跟踪范围的空间范围。 3) 分析了在预警机支援下影响杀伤区远界的因素,得出了在预警机飞行高度足够高,探测跟踪范围足够大的情况下杀伤区主要受到导弹最大飞行斜距限制。 4) 算例表明:预警机的支援使得导弹杀伤区远界得到了成倍的扩展,导弹射程得到了有效的发挥。



2.2 导弹最大飞行斜距

2.3 协同杀伤区远界计算

3 算例仿真



4 结论