自抗扰控制技术在电动缸伺服系统中的研究
2019-03-27秦幸妮刘彦艳
秦幸妮,姜 明,刘彦艳,潘 军
(1.西北机电工程研究所,陕西 咸阳 712099;2.中国人民解放军63961部队,北京 100012)
为提高系统的的战技指标,某大口径舰炮高低系统采用电动缸传动方式。电动缸作为一种新颖的机电一体化产品,具备高精度,高传动效率,响应快,承载能力范围宽,适应性强,寿命长,易于维护、保养等优点,在航空航天、武器装备等领域得到越来越多的关注与应用。
段学超在设计大型射电望远镜中采用带前馈的数字PID伺服滤波器实现电动缸的高精度轨迹跟踪[1]。邓飙等在双电动缸起竖设备的设计中采用模糊PD同步控制器,有效抑制启动段的同步误差及克服负载扰动对同步误差的影响[2]。陈国迎等在转向台架加载系统的研究中采用PID力闭环控制和串联校正方法使电动伺服系统加载力能快速跟踪目标值,同时减小扰动下多余力的影响[3]。
笔者对采用电动缸驱动的大惯量伺服系统进行分析,得出电机转动与身管转动存在非线性关系。为提高系统的稳定性和控制精度,将自抗扰控制技术应用于某舰炮高低系统。基于Simulink平台进行建模仿真,并与传统PID控制的结果进行对比分析。
1 电动缸伺服系统分析
电动缸伺服系统的运动示意图如图1所示。
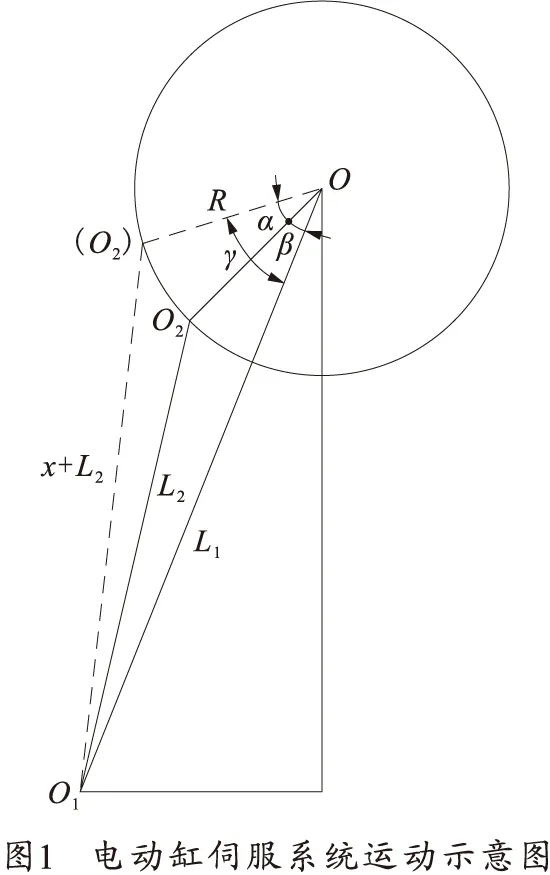
图1中,O为火炮身管回转中心,O1为电动缸下支点,O2为电动缸上支点。电动缸推杆的伸缩带动火炮身管的转动。 转臂半径为R,电动缸下支点到回转中心的距离为L1,电动缸的闭合长度为L2,推杆伸出长度为x,减速比i,丝杠导程s。
电动缸推杆伸出量为0时,火炮身管处于最低角,当推杆伸长时火炮身管转动α,需要计算出电机转动的机械角度θ0和火炮身管转动角度α的关系。
根据余弦定理可以推导出:
(1)

可以得到:
(2)

(3)
由式(2)可以看到α与θ0为非线性运动关系。由式(3)可以看到高低系统调炮速度与电机转速呈非线性关系。因此,考虑将自抗扰控制技术应用于电动缸伺服系统。
2 自抗扰控制器设计
自抗扰控制器(ADRC)包含3 个部分[4]: 跟踪微分器(TD),扩张状态观测器(ESO)和非线性反馈控制器(NLSEF),如图2所示, 图中b0为可调参数,θ为给定输入角度,y为被控对象输出角度,f为外界干扰,x1和x2为TD的输出,z1、z2和z3为ESO的输出,u0为NLSEF输出,u为ADRC控制器输出。

2.1 跟踪微分器(TD)
根据输入角度θ安排过渡过程及提取微分信号[5]。
(4)

式中:h为积分步长;r决定跟踪快慢;h0决定滤波作用[6]。
2.2 扩张状态观测器(ESO)
根据输出角度y和控制量u估计系统状态和扰动[7]:
(5)
β1、β2、β3为误差校正增益;a1、a2为非线性因子;δ为滤波因子。
2.3 非线性反馈控制器(NLSEF)
状态误差的非线性反馈律及扰动补偿[8]。
(6)
式中:β01为误差增益;β02为误差微分增益;a01、a02为非线性因子;b0为补偿因子。
3 电动缸伺服系统数字仿真
高低系统采用位置环、速度环、电流环组成的三环结构控制[9]。根据上节分析,在位置环应用自抗扰控制技术,通过对电机转速的控制,驱动火炮跟踪瞄准。在Simulink中建立电动缸伺服系统仿真模型,如图3所示。

系统部分参数:J=71 800 kg·m2,Tmc=2 200 N·m,Trd=8 000 N·m。电动缸的电机参数:n=3 000 r/min,Tm=636 N·m,Imd=460 A,Jm=0.8 kg·m2,Ci=2.5,减速器传动机构空回为0.333°。
为了验证设计的自抗扰控制器的优越性,对采用带前馈PID 控制器及自抗扰控制器(ADRC)的伺服系统分别进行Simulink 仿真分析。
调炮1 500 mrad,带前馈PID控制系统、自抗扰控制系统的阶跃响应曲线如图4所示。由图4可知,带前馈PID控制系统的调炮误差不大于0.09 mrad;ADRC控制系统的调炮误差不大于0.02 mrad,响应速度快,且无振荡与超调,验证了ADRC控制技术使高低系统具有良好的阶跃跟踪性能。

高低系统以30 °/s的调炮速度进行仿真实验,带前馈PID控制系统、自抗扰控制系统的跟踪位置曲线如图5所示。由图5可知,带前馈PID控制系统的跟踪误差不大于1.01 mrad;ADRC控制系统的跟踪误差不大于0.02 mrad。采用ADRC控制技术使系统能更快、更准确地跟踪位置主令,验证了ADRC控制技术使高低系统具有良好的等速跟踪性能。

高低系统进行振幅30°,周期为6.28 s的正弦跟踪,带前馈PID控制系统、自抗扰控制系统的跟踪位置曲线如图6所示。由图6可知,带前馈PID控制系统的跟踪误差不大于1.45 mrad;ADRC控制系统的跟踪误差不大于0.17 mrad。ADRC控制系统的位置反馈曲线紧紧跟随位置主令,将误差值控制在较小范围内,验证了ADRC控制技术使高低系统具有良好的正弦跟踪性能。

4 结束语
针对某舰炮高低电动缸伺服系统中的非线性环节,采用自抗扰控制技术进行仿真研究。通过与经典控制器仿真对比及分析, 表明了ADRC控制的优越性,从而为电动缸伺服系统设计提供了一种新的技术途径。