无人机高分辨率遥感影像分类方法研究∗
2019-03-26刘启兴景海涛董国涛
刘启兴 景海涛 董国涛
(1.河南理工大学测绘与国土信息工程学院 焦作 454000)(2.黄河水利委员会黄河水利科学研究院水利部黄土高原水土流失过程与控制重点实验室 郑州 450003)
1 引言
高分辨率的无人机遥感影像能够实时获得感兴趣区域的动态信息,而对无人机获得的高分辨率遥感影像进行快速准确的处理已成为满足我国经济建设、应急救灾、环境保护、突发事件处置、地质灾害等一系列重大需求的重要技术。无人机高分辨率遥感像影像中大量精细细节的出现和地物光谱特征的复杂化导致了基于光谱统计特征进行分类的传统方法如极大似然法、最小距离法等分类准确性降低[1]。近些年来,在无人机高分辨率遥感影像分类方面主要有两个研究方向,一是研究新型分类器和融合多个现有分类器进行图像分类[2~3],二是采用面向对象的分类技术进行高分辨率遥感影像分类。但前者还仅仅局限于基于像元层面,无法充分利用高分辨率遥感影像提供的丰富光谱信息、形状和纹理特征等空间属性信息。面向对象的分类技术是当今高分辨率遥感影像分类技术研究的热点,刘伟强、于水等学者提出了基于马尔可夫模型的图像分割方法[4~5]、基于分水岭变化的图像分割算法以及基于边缘提取及生长的分割算法[4~5]。这些算法不仅大大提高了高分辨率遥感影像分类的质量和速度,而且还促进了多源GIS数据的利用和融合[6]。宫鹏等学者提出分类精度标准还没有一个完善的定量评价体系,还存在许多问题有待解决[7~8]。目前混淆矩阵和KAPPA系数被公认为较为合理的遥感图像分类质量的评价标准[9]。
2 数据源与研究方法
2.1 数据源
本研究采用的数据源是2009年5月无人机遥感平台Sky-01C在四川汉旺镇航拍得到的图像数据,如图1。系统传感器为佳能5D Mark II全画幅单反相机,配备35mm光圈镜头,有效像素为2110万。航拍时,航向重叠度为60%,旁向重叠度为30%,相对高度为700m,航行速度为90km/h,设定相机快门速度为1/2000,曝光时间间隔是3s,影像格式是“JPEG”,分辨率为5616×3744。

图1 四川汉旺镇无人机航拍图
2.2 分类方法
本文在对无人机遥感影像进行预处理的基础上,使用ENVI软件进行舰队分类,选择平房、道路、瓦房、田地、树丛、简易房、被毁房屋作为分类类别,选择训练样本并分别使用以下的分类器进行分类。利用eCognition软件进行遥感图像分割,在图像分割基础上使用ENVI软件进行面向对象的最近邻法的遥感图像分类。
2.2.1 极大似然分类法
极大似然比分类法,又称贝叶斯(Bayes)分类,是经常使用的监督分类方法之一,而且被认为是一种稳定性好的分类器。它是通过求出每个像素对于各类别归属概率,把该像素分到归属概率最大的类别中去的方法。简要来说,极大似然分类法通过计算样本的统计值来得到概率密度函数值。对于未知类别像素的归属类别应是取得最大的概率密度函数值的类别[10]。从总体上来看,极大似然分类是分类精度相对最高的分类器之一。
2.2.2 最小距离分类
最小距离分类法是监督分类的方法之一。首先利用训练样本数据计算出每一类别的均值向量及标准差(均方差)向量,然后以均值向量作为该类在特征空间中的中心位置,计算输入影像中每个像元到各类中心的距离。在遥感影像分类处理中,应用最广的距离函数是欧几里德距离[11]。从数学上来讲,欧氏距离代表了特征空间中以各类别中心为原点的区域范围,直接利用欧几里德距离能够相对比较简单地实现监督分类。
2.2.3 神经网络分类
BP算法是应用最为广泛的多级网络训练算法。它是非循环多级网络的训练算法,它在于利用输出层的误差来估计输出层的直接前导层误差,再用这个误差估计更前一层的误差,直到获得其他所有各层的误差估计。这种误差传递是沿着与输入信号传送相反的方向逐级向网络的输入端传递的过程。因此,人们将此算法称为后向传播算法,简称BP算法[12~13]。
2.2.4 支持向量机分类
支持向量机是一种新的数据分类技术。当两个类别的光谱均值非常接近时,SVM也可以根据这些非常有限的样本分开这两个类别。把SVM应用到多光谱、高光谱或者高空间分辨率的遥感图像会取得良好的效果,并能提高遥感图像分类的精度[14]。随着多类支持向量机分类研究方法的研究,支持向量机的应用范围变得更加广泛[15]。
2.2.5 面向对象分类
面向对象分类技术是近年来提出的一种新的分类算法,与以往的传统分类算法相比最大的不同是:面向对象分类方法不是基于单个的像素,而是基于对象或者更直接一点说就是区域。面向对象区域的形成需要进行图像分割,这样就形成了初始较为同质的影像对象,使得影响图像处理的信噪比得到了显著的改善,同类地物的光谱变化被减小,不同类型地物之间的差异增大,增加了类别的可分性。而且面向对象的分类技术能很好地提供矢量结果信息,大大地提高了遥感和地理信息系统集成的能力[16]。本文实验所使用的是最近邻元法。
2.2.6 高分辨遥感图像分割
图像分割是将图像划分为若干个有意义的区域的技术。这里所谓的有意义是指所分割的图像区域与场景的各个目标及背景相一致。高分辨率遥感图像提供了地物更多的信息,例如光谱、形状、纹理等。结合越多的特征进行区域分割将会得到越符合人眼视觉效果的分割结果。遥感影像分割结果的好坏直接影响到遥感影像的分析和理解[17]。所以,研究适用于高分辨率遥感图像的分割算法是高分辨率遥感图像分类的关键步骤,本文实验所使用的是基于图像亮度、色度、饱和度的多尺度、多特征图像分割。
2.3 分类精度分析
在遥感分类后的精度评价中,最常用的是Congalton在1991年提出的混淆矩阵(Confusion Matrix)[9]。混淆矩阵的定义如下:
式中,mij表示试验区内应属于i类的像素被分到 j类中去的像素总数,n为类别。如果混淆中对角线上的元素值越大,则表示分类结果的可靠性越高,如象混淆矩阵中非对角线上的元素值越大,则表示错误分类的现象越严重。分类精度的主要指标有生产精度、用户精度、总体精度、漏分误差、错分误差和Kappa系数。
生产精度:指某一类别的正确分类像元数占参考数据中该类别像元总数的比例,被错误分类像元数占参考数据该类别的总数则为漏分误差。生产精度(PA)体现在混淆矩阵中具体为
漏分误差(OE)则为OE=1-PA。
用户精度(UA):指某一类别正确分类像元数占分为该类像元总数的比例,被错误分类的像元数占分为该类像元的总数则为错分误差(CE)。在混淆矩阵中具体为
错分误差(CE):

总体精度(OA):指总正确分类像元数占总抽样像元数的比例,它反映了分类成果总的正确程度。利用混淆矩阵可表示为
由于总分类精度还只利用了混淆矩阵对角线上的元素,而未利用整个混淆矩阵的信息,作为分类误差的全面衡量尚欠不足,因此许多研究者提出了Kappa系数作为分类精度的另一个指标。Kappa是一种计算分类精度的方法。它是通过把所有地表真实分类中的像元总数乘以混淆矩阵对角线的和,再减去某一类地表真实像元总数与被误分成该类像元总数之积对所有类别求和的结果,再除以总像元数的平方差减去某一类中地表真实像元总数与该类中被分类像元总数之积对所有类别求和的结果所得到的[9]。Kappa系数可用该式计算:
式(6)中,n为分类矩阵行列数,mij为混淆矩阵中第i行第 j列的元素值,mi+和m+j分别表示分类混淆矩阵的行总和及列总和,N为总观察值,也就是混合矩阵中所有元素的和。因为Kappa系数全面地利用了混淆矩阵的信息,可作为分类精度评价的综合指标[9]。
3 结果与讨论
3.1 分类结果图
图2、图3、图4、图5分别是极大似然分类,最小距离分类,神经网络分类,支持向量机分类分类成果图。图6为基于多特征的多尺度、多特征图像分割后的成果图。图7为最近邻元法分类成果图。
从以上分类成果图上可以明显看出基于像元的传统遥感影像分类结果中,一部分建筑物与道路的像元光谱特征相似,存在较严重的混分现象,并且整个分类效果受点噪声的影响较大。而面向对象最近邻分类很好地提取出形状特征信息,避免了同谱异物现象,基于像元的传统遥感影像分类成果中出现的建筑物与道路混分现象和椒盐噪声基本消除。
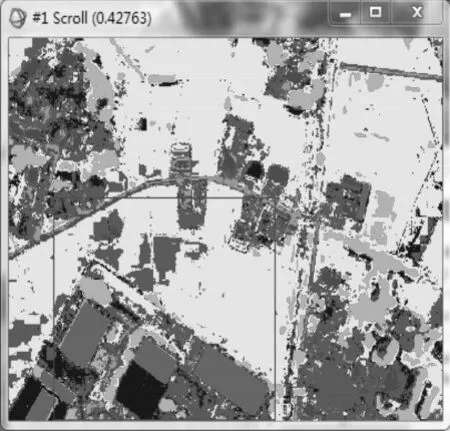
图2 极大似然分类法分类结果

图3 最小距离分类法分类结果
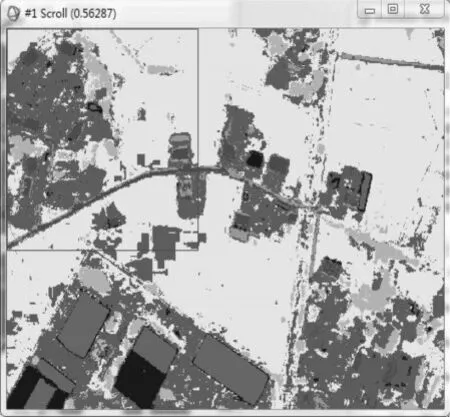
图4 神经网络分类法分类结果
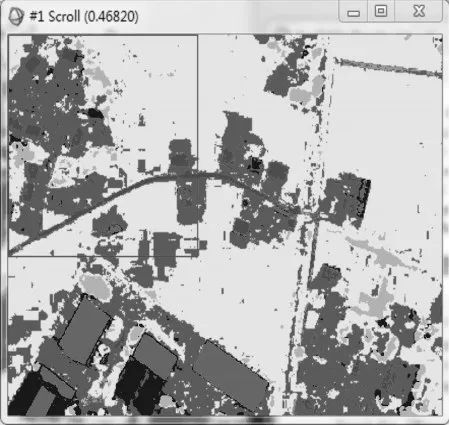
图5 支持向量机分类法分类结果
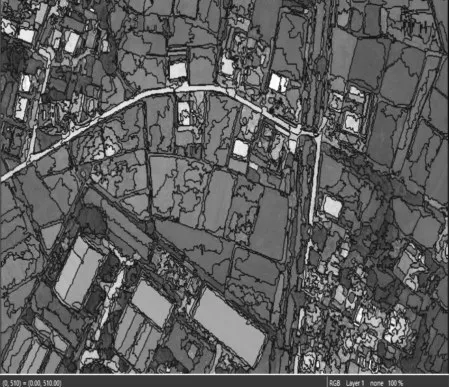
图6 支持向量机分类法分类结果

图7 面向对象的最近邻元法分类结果
3.2 分类结果评价
通过下面各个分类方法的混淆矩阵、分类精度以及Kappa系数等定量说明来比较各个分类方法。
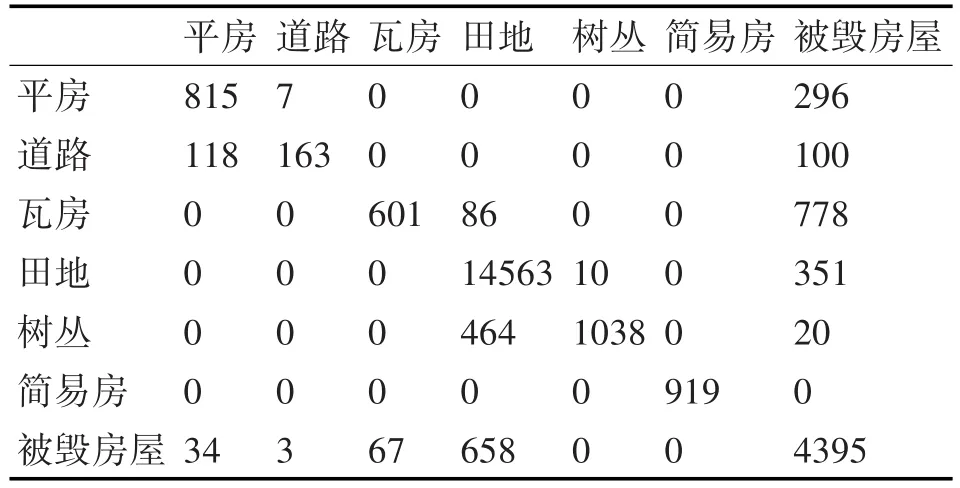
表1 极大似然分类法分类输出混淆矩阵
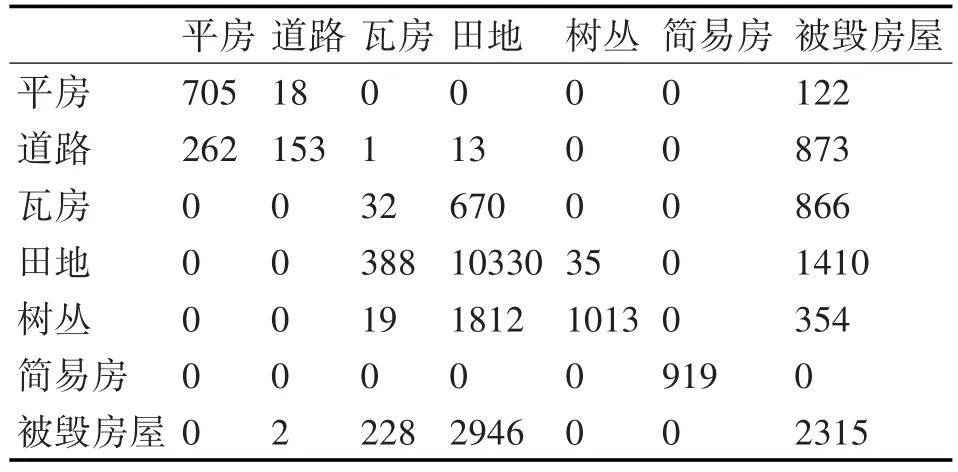
表2 最小距离分类法分类输出混淆矩阵
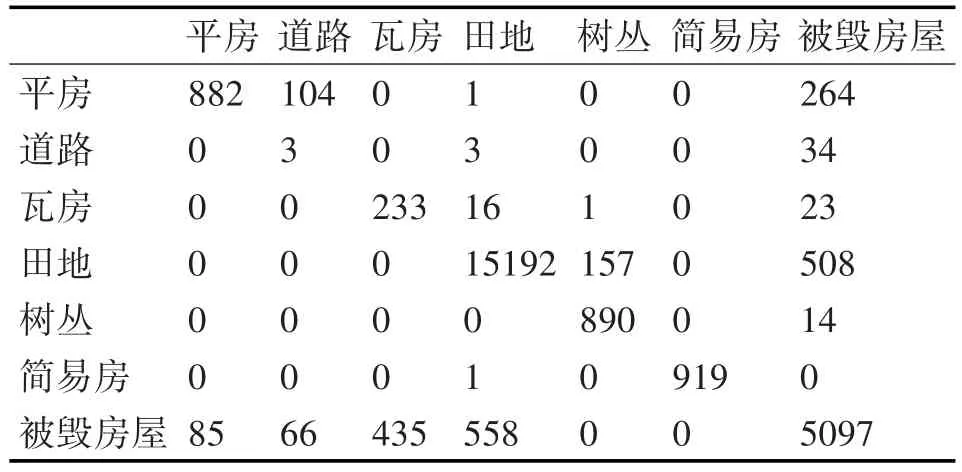
表3 神经网络分类法分类输出混淆矩阵

表4 支持向量机分类法分类输出混淆矩阵
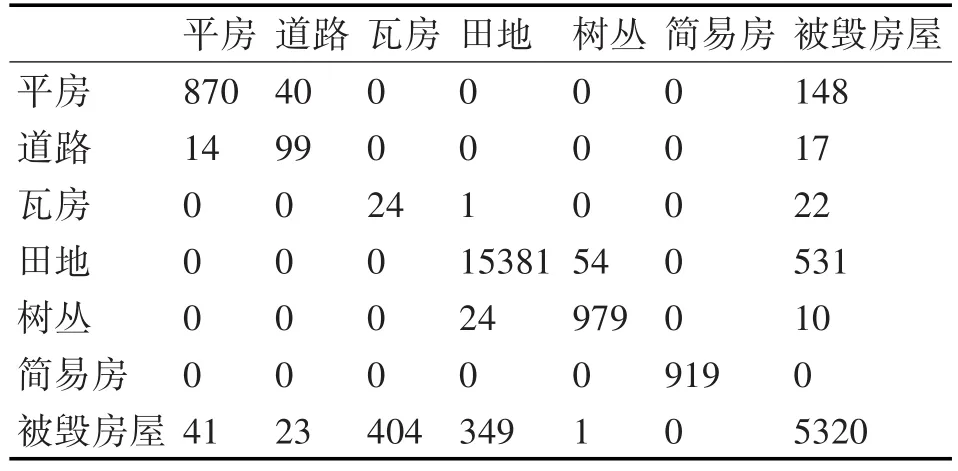
表5 最近邻元分类法分类输出混淆矩阵
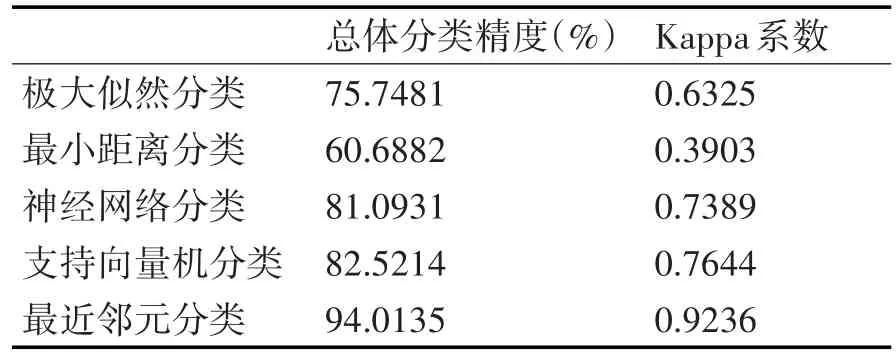
表6 各分类方法分类效果比较表
从上面的精度评价中可以看出:
在基于像元光谱的传统分类方法中,神经网络分类与支持向量机分类等新型分类器与极大似然分类和最小距离分类相比,混分现象相对较少。分类精度和Kappa系数也分别达到了80%和0.7以上。
面向对象的最近邻分类相比基于像元的分类方法能很好地改善分类精度,总体分类精度达到了94%以上。各地物类型提取精度有很大提高,Kappa系数达到0.92以上。
4 结语
本文介绍了基于像元光谱的传统遥感分类方法和面向对象的遥感分类方法。通过混淆矩阵和Kappa系数评价了两者在高分辨率遥感图像进行分类的性能。得出以下结论:
传统的分类方法结果的好坏取决于所选取训练样本的质量和样本数量,特征因子较单一无法有效地解决遥感图像中同谱异物和椒盐噪声等问题,这造成分类精度的降低和大量数据冗余。
其中新型分类器如极大似然分类和神经网络分类在针对一些特定的地物类别、样本具有良好的统计性并满足正态分布的情况下也可取得较好的分类效果。
面向对象的分类方法利用高分辨率遥感影像的纹理等信息进行图像分割,形成了初始较为同质的影像对象,是在对图像进行获得对象特征基础上扩展特征空间进行分类,这种方法能够较好地利用影像的结构和纹理等特征信息,使分类精度和信噪比得到显著改善。
所以,面向对象的遥感影像分类方法相比于传统的基于像元的影响分类方法具有明显的优势。
本文也存在一些不足之处,如何在不同的尺度和区域选取合适的分类方法,在图像分割过程中的阈值选择不能满足所有地物类型,从而影响最后的分类精度而且在分类精度评价方面还需要更加完善合理评价体系,这些问题的解决都需要开展更多的研究和验证工作。