基于卫星定位的一类位移监测系统的设计与实现
2019-03-23张春家吕晓军刘思何贾新春
张春家,吕晓军,刘思何,杨 波,贾新春
(1.中国铁道科学研究院 电子计算技术研究所,北京 100081;2.山西大学 数学科学学院,山西 太原 030006)
0 引言
我国是一个疆域宽广,幅员辽阔的大国,其中山地、高原以及丘陵的面积占到了国土总面积的69%。复杂多变、山地众多的地形条件决定了我国是一个滑坡灾害发生非常频繁的国家,由滑坡造成的人员伤亡以及经济损失也非常严重[1]。此外,由人类工程活动导致的滑坡灾害事件也时有发生。近年来,随着社会经济以及科学技术的飞速发展,人类活动对自然环境的影响越来越大,由人为因素引发的滑坡事件也更加频繁。滑坡是人类长期面对的一种危害性极大的地质灾害,它不仅严重威胁着人民群众的生命安全,还会阻断交通,毁坏建筑,给国家带来巨大的经济损失[2]。因此,为了尽量降低甚至避免滑坡灾害带来的损失,对滑坡易发地区进行监测是非常必要的。文献[3]设计了一组边坡模型试验,通过分级加载的方法模拟了堆载滑坡的演化过程,结合滑体表面水平位移实测数据分析了滑坡演化过程的空间变形破坏特征。以实测位移数据为依据反演出模型边坡应力场和位移场的演化过程,分析了边坡变形机理和演化规律,为预防预测边坡滑坡提供了理论依据。文献[4]根据实际边坡现场情况,基于分布式光纤传感技术,设计一套监测网络,研究同一断面不同锚杆的应变分布规律。但是该方法需要安装光纤,人员成本相对较高。如何提高滑坡监测实时性和降低建设成本,成为部分研究者关注的重点。
滑坡体位移监测法是一种跟踪滑坡体移动状态的监测方法。滑坡体位移监测可以采用激光测距技术、GPS技术、合成孔径雷达干涉测量法等多种方法实现。其中GPS技术最为成熟,应用也最为广泛。通过GPS卫星定位技术,得到滑坡体上监测点的高精度三维坐标,根据坐标信息的变化情况能够判断出监测点是否发生移动。GPS技术测量精度高,受环境影响较小,易于实现自动化监测,是一种理想的滑坡体位移监测手段[5]。文献[6]将多个低精度GPS接收机组合成实时平均数据的系统,与单个接收机相比,数据的准确性和可靠性均显著提高。但其卫星数据来源仅仅依靠GPS,相对单一[7]。基于GPS/北斗的差分动态定位算法实现了基于低成本设备的中等定位精度。但是该方法需要复杂的计算[8]分别考虑不同时段下数据,调查数据长度对估计位移的影响。但是该方法需要采样的时间较长,实时性较差。
结合文献[6]~文献[8]的优缺点,设计了一类位移监测系统,该系统可应用于滑坡体位移监测中。考虑到滑坡易发地区通常位于地形、地貌复杂,条件恶劣,不方便构建通信网络的偏远山区。若要对这些地区进行监测,必须构建一个可以实现短距离通信、抗干扰性强的、安全稳定的无线局域网络。因此,在设计位移监测系统时,采用无线传感器网络来对滑坡易发地区进行监测[9-10]。基于以上要求,采用基于ZigBee无线通信技术作为建立无线传感器网络的手段[11]。
在卫星定位技术以及无线传感器网络技术的基础上,设计了一种基于多位移点的监测系统,用来对滑坡灾害隐患点进行监测。同时考虑了一种算法,用于提高系统单点的定位精度。当滑坡发生时,传感器节点发生移动,该系统能够及时监测到节点的移动并向用户发出警报。
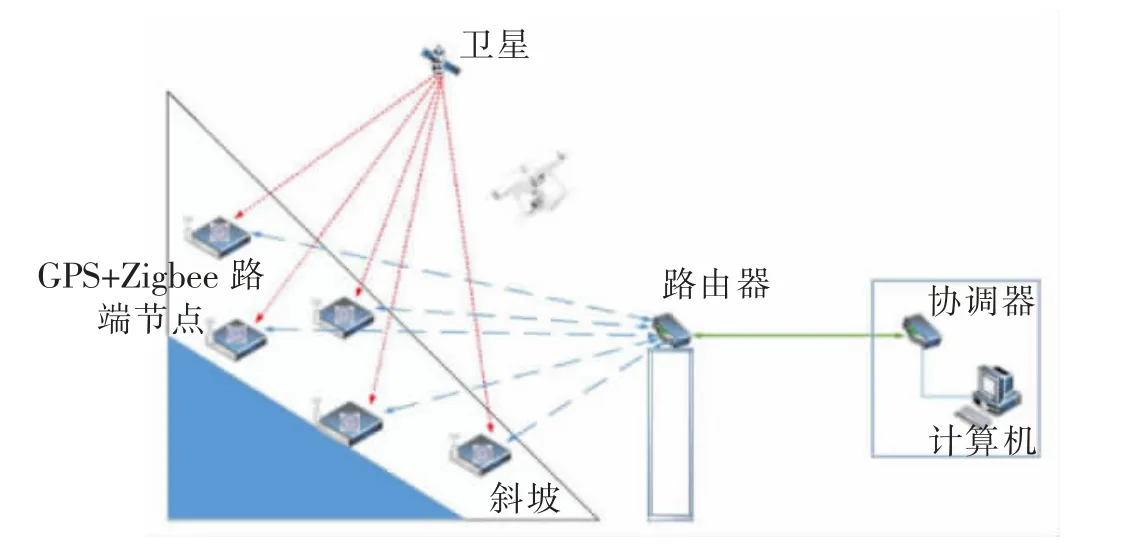
图1 位移监测系统整体方案
1 系统设计
1.1 系统运行机理
位移监测系统由终端节点,路由器以及上位机3个部分组成。如图1所示。
终端节点负责采集节点的位置信息,并通过无线通讯的方式将采集到的数据发送出去。路由器负责接收终端节点发送的数据,并将其转发至协调器。路由器的存在极大地延长了通讯距离,使得数据的远距离传输成为现实。
协调器负责接收终端节点或者路由节点发送的数据,并将数据通过串口传输给上位机。协调器节点还可以通过发送指令实现对终端节点的控制。上位机通过位移监测软件读取数据,并对数据进行分析处理,得出终端节点所在位置的实时情况。
1.2 终端节点
终端节点用来完成对定位信息和其它相关信息的采集,每个终端节点分为3个部分。
(1)供电模块:终端节点采用太阳能电池供电,使得节点能够长时间工作[12-13]。
(2)数据采集模块:节点与GPS天线相连,它接收天线获取的卫星信号,并通过滤波,信息融合等一系列的处理,得出节点所在位置的定位信息。
(3)无线通讯模块:本系统采用的是基于Zigbee的无线通信技术[14]。
终端节点的结构如图2所示。
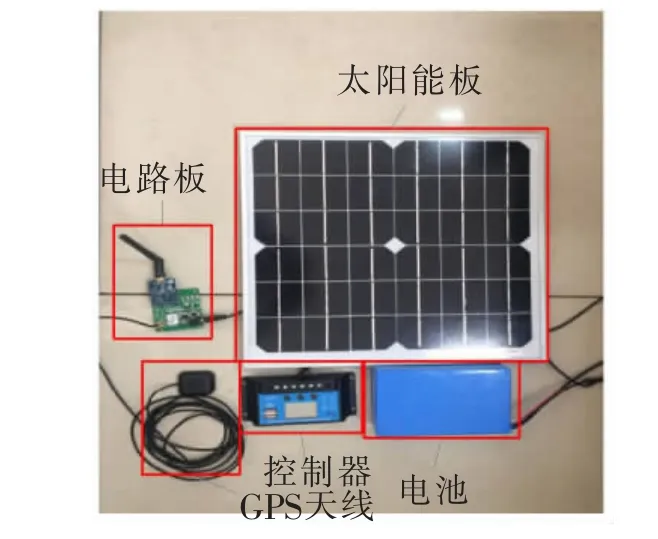
图2 终端节点结构图
1.3 位移监测软件功能需求
位移监测软件运行于上位机上,是位移监测系统最重要的组成部分,通过对位移监测系统整体方案的介绍,可知位移监测软件的主要任务为:
(1)显示协调器传输的传感器数据;
(2)完成对数据的解析,处理以及存储,并能将这些数据以图形、表格等形式展现出来;
(3)设计合理的位移报警算法对节点采集的卫星定位数据进行分析,根据分析结果判断节点位置是否发生移动;
(4)通过协调器发送指令,实现对终端节点的控制。
位移监测软件的系统架构如图3所示。
协调器接收到终端节点采集的数据之后,通过串口将数据传输给上位机。位移监测软件接收到数据之后,会根据通讯协议对数据进行解析,从中提取出节点编号、节点时间、节点经纬度、节点短地址、信息类型、RSSI(Received Signal Strength Indicator)等多种信息,并将这些信息保存至MySql数据库中。在软件得到终端节点采集信息之后,会根据位移报警算法对这些信息进行分析,根据分析结果判断节点位置是否发生移动,并将这些信息以图形、表格等多种形式表现出来。用户可以通过用户界面查看节点信息,也可以通过发送指令控制终端节点。
系统的整体设计框架如图4所示。
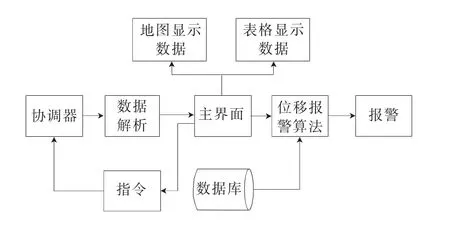
图3 系统架构图
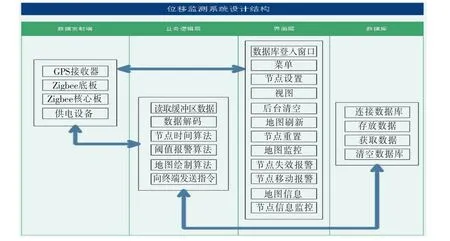
图4 系统设计框架
1.4 用户界面
1.4.1 初始设置
当用户打开程序之后,应该先正确完成系统的初始设置,只有在完成初始设置的前提下,才能开始接下来的操作。否则,系统无法正常运行。步骤如下。
(1)连接数据库。打开程序,会出现连接数据库界面,用户只有正确输入服务器名、用户名、密码数据库名以及表名之后,才能成功连接到数据库。
(2)串口设置。打开串口设置界面,首先选定可用的串口号,再根据系统要求选择波特率、起始位、停止位、校验位,所有参数设置完毕之后点击确定,这时打开串口,初始设置完成。
初始设置完成之后,用户便可以进行接下来的操作。
1.4.2 软件操作
软件使用步骤如图5所示。
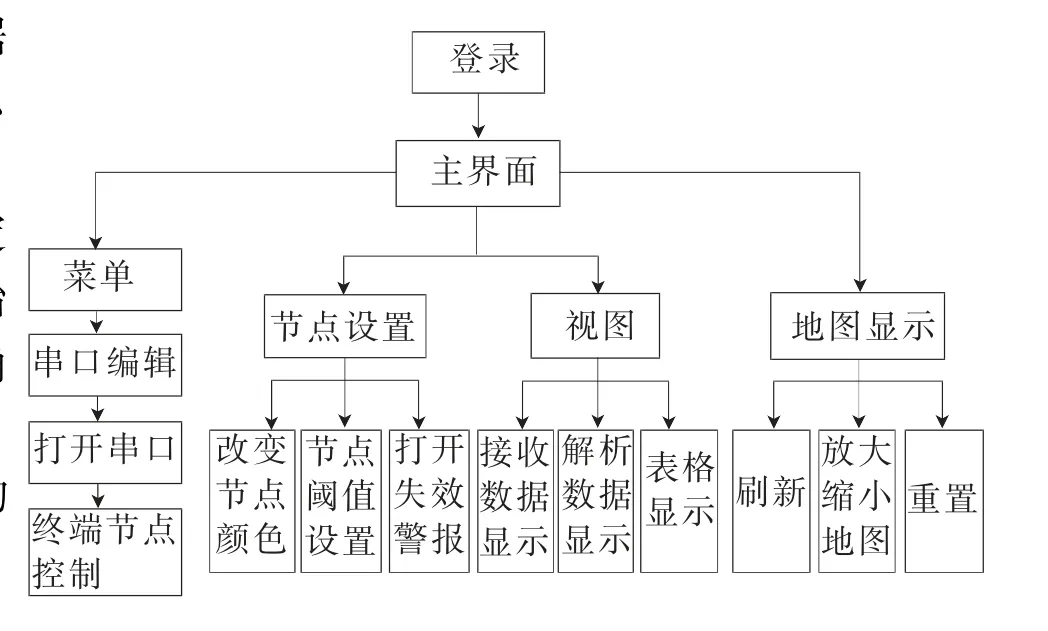
图5 软件使用步骤示意图
1.4.3 软件功能
(1)数据解析。终端节点采集的原始数据必须依据通信协议进行解析,之后才能得出节点的各种信息。打开主界面上的视图栏,点击查看解析数据。
(2)数据展示。可以通过图形以及表格形式来展示数据。打开主界面的视图栏,点击表格显示可以打开图6所示的界面。通过该界面可以通过表格形式查看节点的各种信息。
(3)终端节点控制。打开主界面上的菜单栏,点击节点控制可以打开终端节点控制界面。通过该界面上的按钮可以控制节点的工作状态,数据发送速率以及定位信息(北斗定位信息、GPS定位信息和GPS/北斗混合定位信息)。
(4)报警。上位机首先会根据终端节点是否发送数据来判断节点是否失效,若发现节点失效,则发出警报。如果节点能够正常发送数据,则根据位移报警算法对节点发送的经纬度信息进行分析,若分析结果显示节点发生位移,则发出警报。

图6 通过表格查看节点信息
2 位移报警算法
由于地球的公转、自转以及天气状况的影响,终端节点即使在未移动时采集的经纬度数据也不是稳定的。因此,不能因为节点采集的经纬度数据发生了变化,就认为节点发生了移动。若要从经纬度数据中得出终端节点的移动情况,必须先根据位移报警算法对经纬度数据进行分析,然后根据分析结果来判断节点是否发生移动。
2.1 经纬度数据求距离
首先介绍一种求两个经纬度数据之间距离的运算

Θ表示一种运算,用来求两个经纬度有序实数对之间的距离。(lon1,lat1)与(lon2,lat2)都是二维向量,分别表示两个不同的经纬度数据,d表示距离。
Θ表示的运算过程如下:
(1)把经纬度数据(lon1,lat1)转换成以地心为原点的空间直角坐标(x1,y1,z1),其中
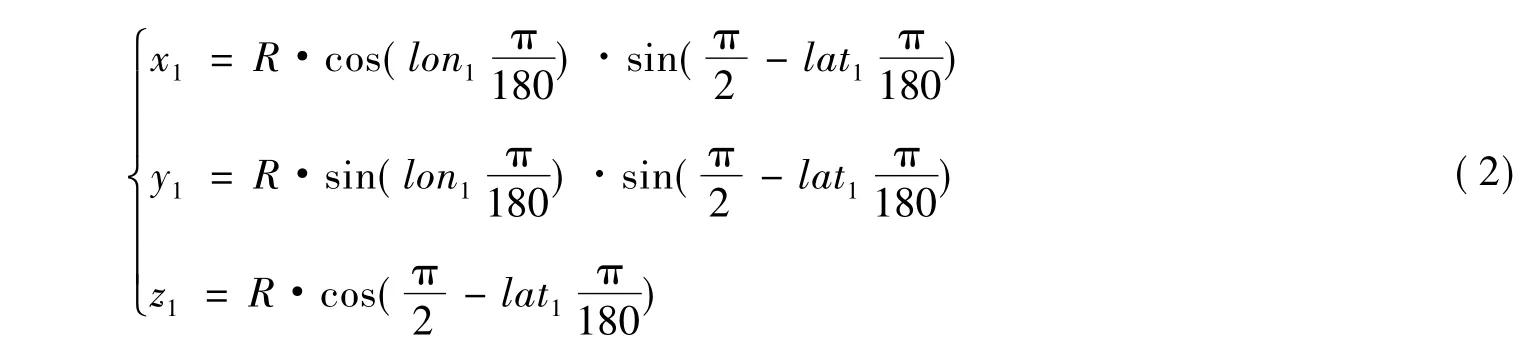
同理,将经纬度数据(lon2,lat2)转换成以地心为原点的空间直角坐标(x2,y2,z2)。R为地球半径。
(2)求两个空间直角坐标的直线距离

(3)根据余弦定理求两个空间直角坐标与地心的连线所成的夹角

(4)计算两个空间直角坐标在地球表面的弧长

综上可得两个经纬度数据之间的距离。
2.2 基于滑动平均滤波和一阶前向差分的算法
针对上面算法存在的问题,设计了一种基于滑动平均滤波和一阶前向差分的位移报警算法。算法分为4个步骤:
(1)数据预处理。首先对节点采集的原始数据做M点滑动平均滤波,减少一部分测量误差。M点滑动平均滤波的输入输出关系为

式中,(xk-n,yk-n)为原始数据,是一个二维向量;(珓xk,珓yk)为滤波后的数据;取M=5。
(2)一阶前向差分。

式中,(lonk+m,latk+m)是一个二维向量,lonk+m表示节点第k+m个数据的经度,latk+m表示节点第k+m个数据的纬度;Δdk表示节点第k+m个数据与第k个数据之间的距离。
通过实验得出了节点移动对Δdk的影响,实验结果如下:当节点未移动时,实验结果如图7所示。可以看出,当节点未移动时,Δdk比较稳定,其中最大值小于0.7 m。节点移动时,实验结果如图8所示。
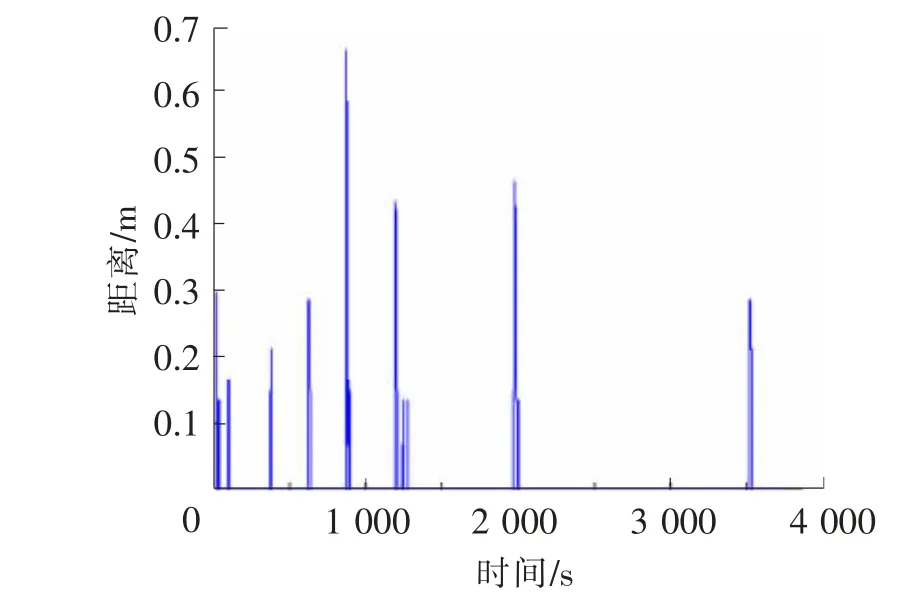
图7 节点未移动时的距离变化
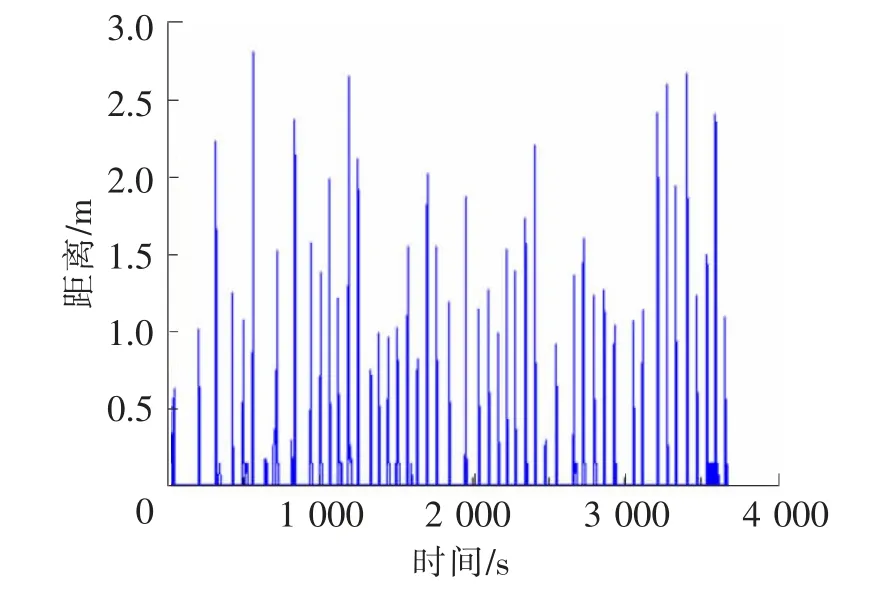
图8 节点移动时Δdk的变化
图8中实验中节点共移动了40次。可以看出,当节点发生移动时,Δdk明显增大。
(3)阈值设定。通过大量的实验来确定合理的阈值。
(4)判断移动。为了减小偶然误差的影响,这里取m=5,即Δdk=(lonk+5,latk+5)Θ(lonk,latk),k=1,2,…,当Δdk连续3次大于阈值时,才判断节点发生了移动。
2.3 实验结果
如果节点发生了移动,但上位机未报警,称为漏报。如果节点未移动,上位机却发生警报,则称为误报。
定义上位机有报警信息记为事件A,无报警信息记为事件珔A;节点发生移动记为事件B,节点未发生移动的事件为珔B。
则有如下关系

定义N为节点移动次数,P为节点移动时发生漏报的次数,则漏报率
位移报警算法确定之后,需要通过实验来确定最优阈值。实验场地中部署了6个节点,节点编号设置为40,41,…,45。在实验中,对40,41,42和44号节点进行移动,43和45号节点保持静止。实验结果如图9、图10所示。
由图9可知,在节点未移动的情况下,阈值越小,节点误报次数越高。由图10可知,当节点移动距离相同时,阈值越小,平均漏报率越低;在阈值相同时,移动距离越大,平均漏报率越低。为了同时降低节点的误报次数以及相同移动距离下的平均漏报率,考虑将阈值设为0.5 m。
当阈值设定为0.5 m时,节点的平均漏报率以及误报次数依然很高。为了更准确地进行位移警报,需要在同一地区内部署多个节点。当位于同一地区内的多个节点同时报警时,则认为节点发生了移动。为了验证该方法的可行性,进行了实验。实验中,将阈值设定为0.5 m,然后同时移动4个节点,移动100次。统计4个节点同时移动时会有几个节点发生警报,结果如表1所示。
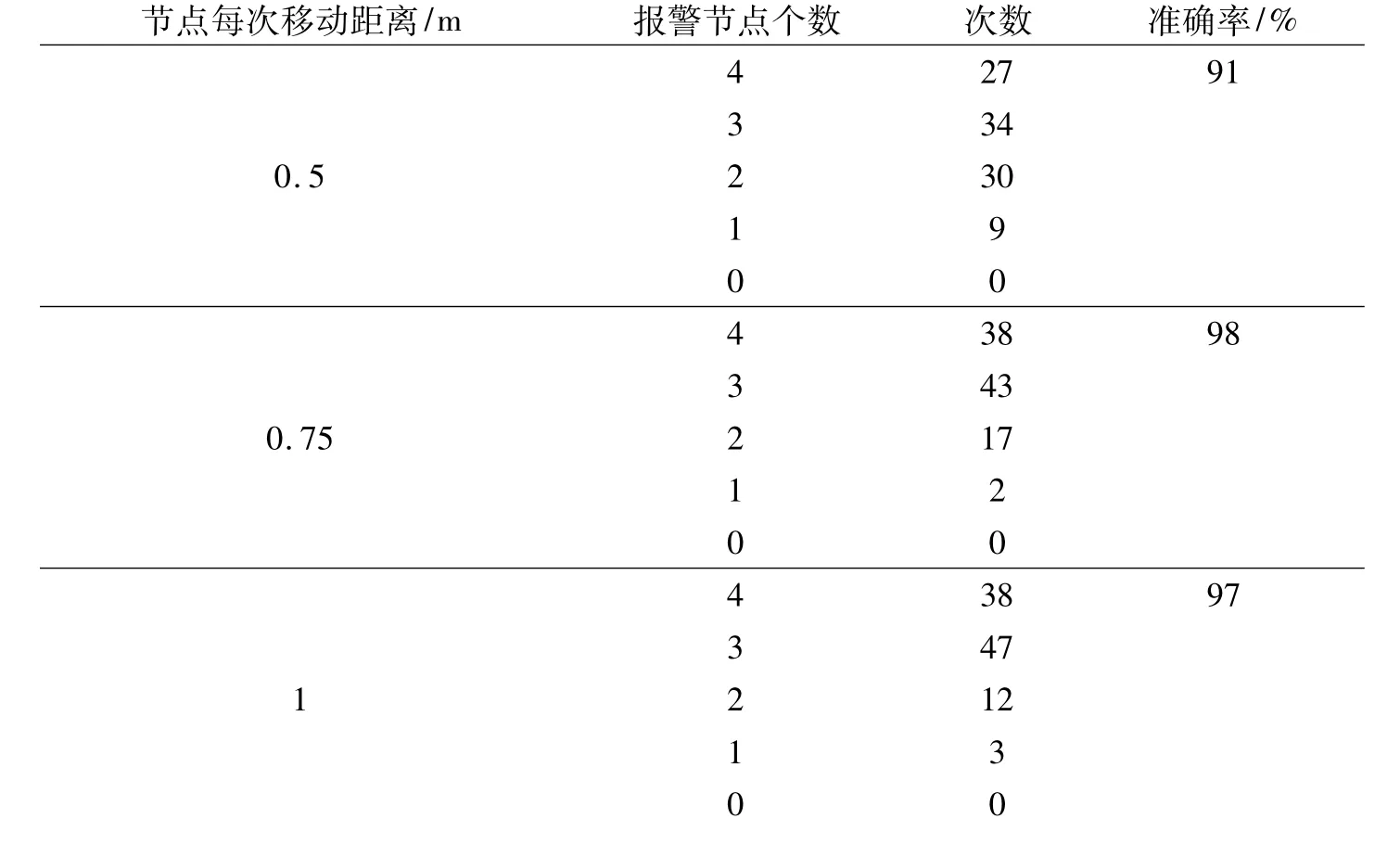
表1 4个节点中报警节点个数

注:准确率是指2个及2个以上的节点同时报警的概率。
虽然节点会发生误报,但多个节点同时误报的概率是极小的。因此,可以认为当2个及2个以上的节点同时发生警报时,节点发生了移动。由表1可知,在4个节点同时移动0.5 m的情况下,2个及2个以上节点同时报警的概率达到了91%,而且随着节点移动距离增加,准确率也随之提高。
3 总结
本文阐述的位移监测系统由多个终端节点、一个路由器、以及一个与协调器相连的上位机组成。位移监测系统软件运行于上位机之上,是位移监测系统的重要组成部分。首先,详细介绍了位移监测系统,然后设计了一种基于滑动均值滤波和一阶前向差分的位移报警算法来提高定位精度,最后通过现场实验对位移报警算法的准确性进行验证。