APM牵引供电系统负荷过程仿真与优化设计研究
2019-03-23夏顺盈王立德王银张翠娥王冲
夏顺盈,王立德,王银,张翠娥,王冲
APM牵引供电系统负荷过程仿真与优化设计研究
夏顺盈,王立德,王银,张翠娥,王冲
(北京交通大学 电气工程学院,北京 100044)
APM是一种立体交叉的、无人驾驶的轨道交通系统,常用于承担大型机场旅客运输任务。目前国内关于APM牵引供电系统仿真的研究相对较少,为辅助设计新建机场APM线,以常见的胶轮路轨制系统为例,研究列车牵引计算方法,并对牵引供电网络进行潮流分析,为APM牵引供电系统提供设计依据;为降低供电轨有功功率损失,提高电能的利用率,建立供电轨功率损失最小化模型,采用粒子群优化PSO算法对牵引变电所位置设置进行优化设计。实验结果表明,本文所述方法能有效实现APM牵引供电系统优化设计的目的,具有较强的工程应用价值。
APM;牵引供电系统;负荷过程仿真;优化设计;粒子群优化PSO

APM (Automated People Mover)即旅客捷运系统,是一种立体交叉的、无人驾驶的轨道交通系统,其主要承担各大型机场内各航站楼间的旅客运输任务。APM系统与常见的城市轨道交通系统的不同之处在于其通常采用胶轮路轨制式,即胶轮车辆在混凝土路面行驶[1]。目前,APM系统在国内应用相对较少,运营线路仅有首都国际机场APM线、广州珠江新城APM线以及上海地铁8号线3期浦江线;国外应用则较为广泛,很多大型机场,如坦帕国际机场、旧金山机场以及法兰克福机场等都有所应用。APM牵引供电系统研究方面,冯剑冰[2]对APM牵引供电系统的无功功率和谐波进行研究,提出了改善功率因数和抑制谐波的方法;刘娟[3]研究并设计了一款APM钢铝复合接触轨,填补了国内空白并在广州珠江新城APM线成功应用。Hester等[4]采用Lea+Elliott公司TPSim软件对达拉斯沃斯堡国际机场APM线进行了仿真计算,并与实际测量数据进行了对比分析;Urien[5]为实现APM系统的节能运行,分别从制动能量反馈、机械传动效率、辅助设备损耗以及电气损耗等方面提出了解决方案,并研发了Siemens Val,Cityval以及Airval APM系统;Srivichai等[6]研究了APM系统运动计算方法并对三相400VAC牵引供电系统进行了仿真分析;Khemkladmuk等[7]研究了APM系统速度控制模式,并采用遗传算法(Genetic Algorithm ,GA)和粒子群优化算法(Particle Swarm Optimization ,PSO)对速度控制模式曲线进行了优化设计,使列车运行过程中总机械功率损耗达到最小。目前,有关APM牵引供电系统变电所位置优化设计相关研究相对较少,而变电所位置设置对供电轨功率损失影响较大。为辅助并优化设计新建机场APM线,本文以常见的胶轮路轨制系统为例,研究APM牵引供电系统负荷过程仿真模型,并以供电轨有功功率损失最小化为目标,采用粒子群优化算法对牵引变电所位置进行优化设计,实验结果表明该算法能有效降低供电轨功率损失,提高电能的利用率。
1 列车牵引计算方法
APM列车的运行方式与钢轮钢轨制不同,其车辆的转向需要由导向轨实现,并由导向轨之上的供电轨提供动力。列车牵引计算的目的是分析列车的受力和运行速度,计算列车的有功功率、运行位置等信息。再以牵引计算结果为依据,对牵引供电网络进行潮流计算,分析供电轨上电压、电流及功率损耗等[8]。
1.1 运行受力分析
列车在运行过程中受牵引力、基本阻力以及坡道附加阻力的共同作用,其中基本阻力包括胶轮的滚动摩擦阻力和空气阻力。根据牛顿第二定律,可知列车受力方程:


其中:F,F,F和F分别为列车牵引力、滚动摩擦阻力、空气阻力和坡道附加阻力,N;为运行加速度,m/s2;eff,M和M分别为列车等效质量、列车自重和列车载重,kg;为回转质量系数。
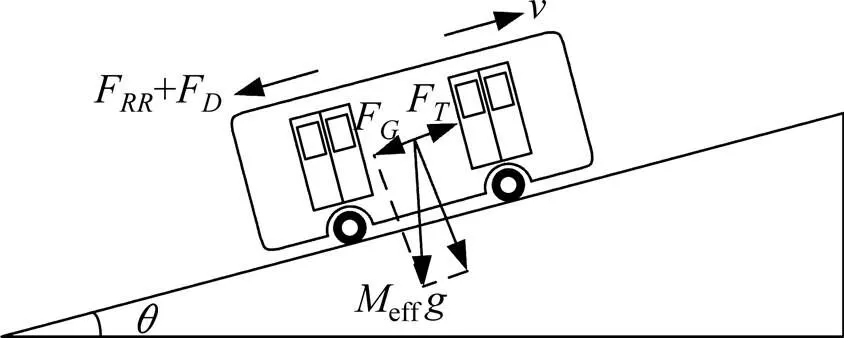
图1 列车受力示意图
通常列车所受基本阻力除滚动摩擦阻力和空气阻力之外,还受轴承的摩擦、胶轮与水泥路面产生的相对滑动以及胶轮与路面的冲击和振动等因素的影响。因此,工程上常采用戴维斯公式对列车基本阻力进行估算[9]:


其中:w为单位重量下基本阻力,N/N;为列车轴重,N;为轴数;为列车运行速度,m/s;为迎风面积,m2;为与导轨条件相关的经验系数,取0.03;为与车辆形状相关的阻力系数,取0.000 34;0和1均为常数,分别取1.3和29。坡道附加阻力可表示为:

其中:w为单位重量下坡道附加阻力;为坡度。
列车运行过程中所消耗的电功率为:

其中:为机械传递效率;P为列车功率损耗,W。
1.2 运动计算
APM作为一种无人驾驶的轨道交通系统,其运行过程全部由联锁设备和ATC(Automatic Train Control)系统进行控制。ATC系统主要包括ATO (Automatic Train Operation),ATP(Automatic Train Protection)和ATS(Automatic Train Supervision)子系统,其中ATO子系统主要控制列车的驱动和制动;ATP子系统可以实现列车运行过程的自动防护;ATS子系统可以对列车的运行过程进行实时监 控[10]。列车运行速度、加速度和加加速度均受ATO子系统控制,其数值的选取与线路条件和乘客的舒适度有关。通常列车的运行过程可以分为3个阶段,如图2所示。

图2 速度控制模式曲线
1) 加速阶段(0~1):列车以给定加速度加速到最大速度max。其中,0至01阶段,列车以最大加加速度max启动直到加速度达到最大值max;01至02阶段,列车以最大加速度max持续加速;02至1阶段,列车以−max降低加速度,直到加速度降为 0 m/s2。
2) 巡航阶段(1~2):列车以最大运行速度max持续运行;
3) 制动阶段(2~3):列车以给定减速度制动直至停车。其中,2至21阶段,列车以−max增大减速度,直到减速度达到最大−max;21至22阶段,列车以最大减速度−max持续减速;22至3阶段,列车以max降低减速度,直到减速度降为0 m/s2。
列车运行过程中的加速度、速度和距离可以通过式(6)~(8)多次迭代进行计算:


其中:为加加速度,m/s3;a和a+1分别是迭代前后的加速度,m/s2;v+1和v分别为迭代前后的速度,m/s;s+1和s分别是迭代前后的距离,m。
2 牵引变电所优化分布模型
2.1 供电轨功率损失分布数学模型
APM牵引供电系统通常采用2种供电制式:三相交流(400 V或600 V)制和直流(750 V)制。当APM系统采用三相交流供电制式时,其接触轨通常采用五轨制,由3条动力轨和2条接地轨组成[11]。其结构如图3所示。

图3 三相交流接触轨示意图
本文以三相交流制牵引供电系统为例,采用Newton-Raphson法对整个牵引供电网络进行潮流计算,再对供电轨上电压、电流和功率的分布规律进行分析。根据三相交流电路的对称性,采用单相Ⅱ型等值电路对供电轨进行建模,如图4所示。

图4 供电轨单相等值电路模型


其中:Z为节点至+1间供电轨阻抗;为供电轨间漏导纳。
由上可知,节点注入的有功功率P和供电轨任意2节点间有功功率损耗ΔP可表示为:

2.2 供电轨最小功率损失模型
牵引变电所间供电轨的长度对供电轨上的电能质量影响很大。当供电轨较长时,供电轨上的电压水平较低,功率损失较大;反之,供电轨上电能质量较好,但增加了牵引变电所的数量和建设成本。本文以供电轨有功功率损失最小化为目标,以牵引变电所位置为自变量,建立供电轨最小功率损失数学模型,并采用粒子群优化算法对牵引供电系统进行了优化设计[12−13]。
假设某APM线有座牵引变电所,沿线供电轨总长度为,如图5所示。

图5 牵引变电所沿线分布示意图
设第段(点至+1点)供电轨有功损失为ΔP。在一个仿真周期内,整条线路供电轨平均有功功率损失最小化模型可表示为:
其中:Δ为仿真时间间隔;Δ为一个仿真周期内平均有功功率损失;为牵引变电所数量;为列车与供电轨接触点处电压;L为牵引变电所位置;min和max分别为供电轨允许电压范围边界;min和max分别为变电所位置的取值范围边界。
在寻优过程中,有些牵引变电所位置的选取可能会导致列车运行中供电轨电压超过设计允许阈值,对于该类设计方案应予以排除。
3 基于粒子群算法的优化设计
3.1 粒子群优化算法
粒子群优化PSO算法是在1995年由美国社会心理学家James Kennedy提出[7]。该算法模拟鸟群的捕食行为,将优化问题中的每个可行解当做“粒子”,每个“粒子”各自具有初值,按照自身经验并跟随鸟群中的头鸟进行全局搜索[14−15]。
假设在维空间中存在个粒子,每个粒子的位置和速度可表示为:

进化方程可表示为:



3.2 牵引供电系统优化设计方法


图6 牵引供电系统优化算法流程图
步骤1初始化粒子群,配置粒子群规模和迭代次数,设置变电所数量和变电所初始位置等;
步骤2 读取列车牵引计算结果,获取不同时刻下列车功率损耗P;
步骤3 对整个牵引供电网络进行潮流计算;
步骤4 计算整个仿真周期下供电轨平均有功功率损失Δ;
步骤5 更新粒子的适应值Δ及最优位置;
步骤7 判断全局最优解的适应值是否满足求解精度或达到最大迭代次数,若是,则结束迭代,输出最优解;否则,更新粒子的速度和位置,返回步骤2继续求解。
4 仿真结果与分析
对某机场APM线牵引供电系统进行仿真分析,该线全长2.08 km,沿线有3座车站(C,D和E),并分设3座牵引变电所,每座牵引变电所有2台牵引变压器,其一次侧的电压等级为10 kV,二次侧为0.6 kV,出线分别连接至上行和下行供电轨。牵引变压器、供电轨及车辆参数如表1~2所示。

表1 牵引变压器、供电轨参数

表2 车辆运行参数
根据牵引供电系统各部件参数,采用本文所述牵引计算方法,对该APM线路进行牵引计算分析,可得列车运行加速度、速度及距离随时间变化关系,如图7所示。
列车在加速阶段,以最大加加速度0.49 m/s3运行直到加速度达到最大值0.96 m/s2,之后以最大加速度运行8.9 s达到最大运行速度6.67 m/s;上行线路列车分别经过C-D-E车站,并在各车站平均停车55 s。下行阶段经E-C返回初始位置。
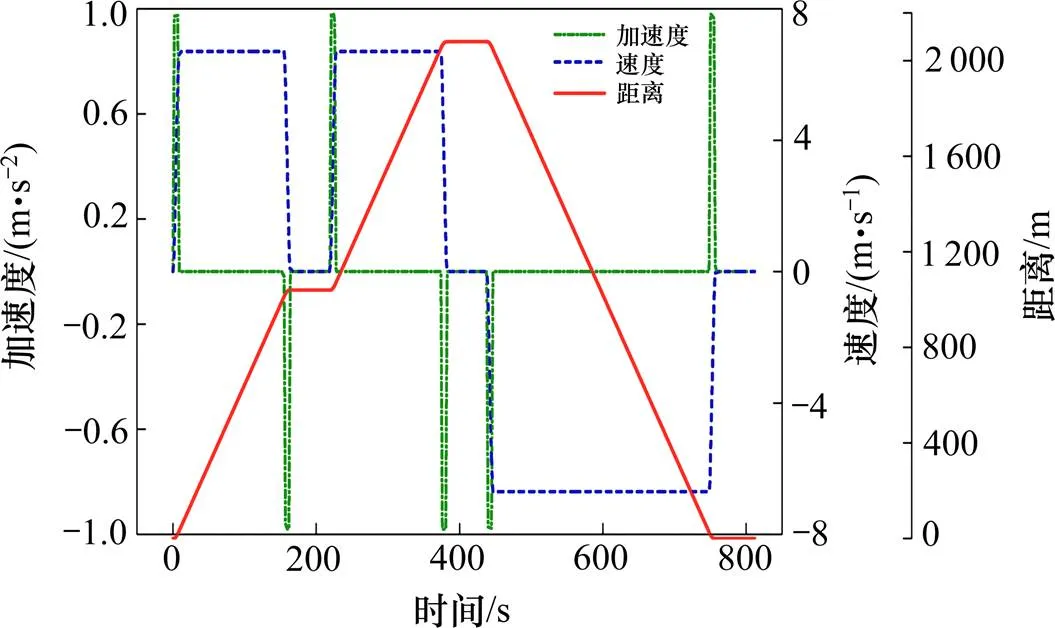
图7 列车运行曲线
根据式(4)计算列车功率−距离曲线,如图8所示。列车在加速阶段有功功率损耗较大,最大值达到401.18 kW;巡航阶段,列车只克服阻力做功,功率损耗较小为10.98 kW;停车时,功率损耗为 0 kW,此处忽略车辆的固定功率损耗。
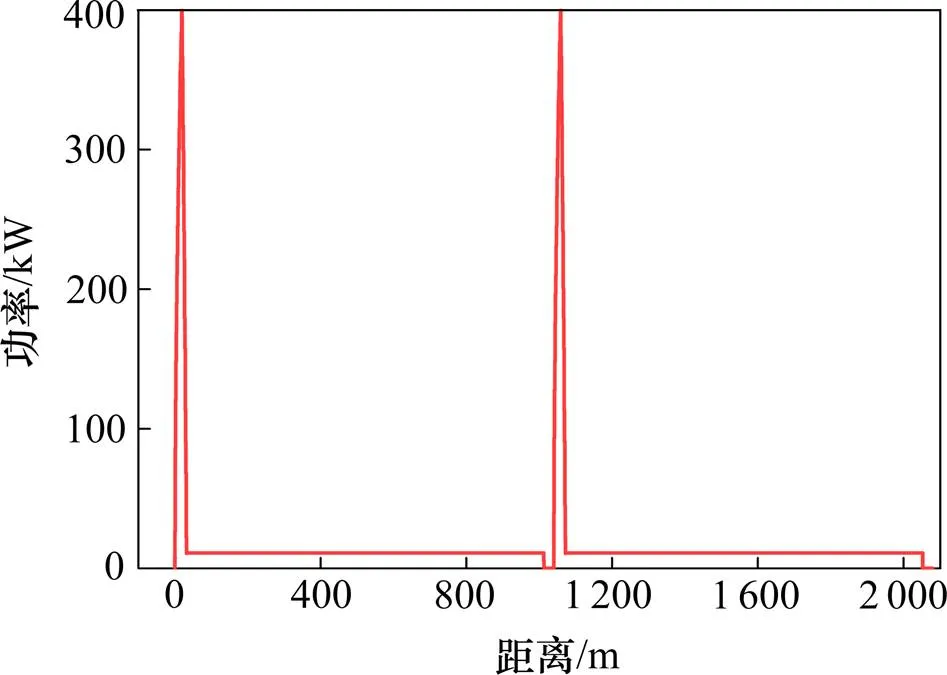
图8 列车功率−距离曲线
该APM线繁忙时段采用PL4×3模式运行,追踪时间为200 s,每列车单圈平均运行时间为810 s,列车运行图如图9所示。
PSO算法最大迭代次数为100,种群数量为10,迭代精度为10-4,惯性权重=1,学习因子1=2=1;供电轨电压上限为615 V,下限为510 V;牵引变压器位置变化区间设置如表3所示。
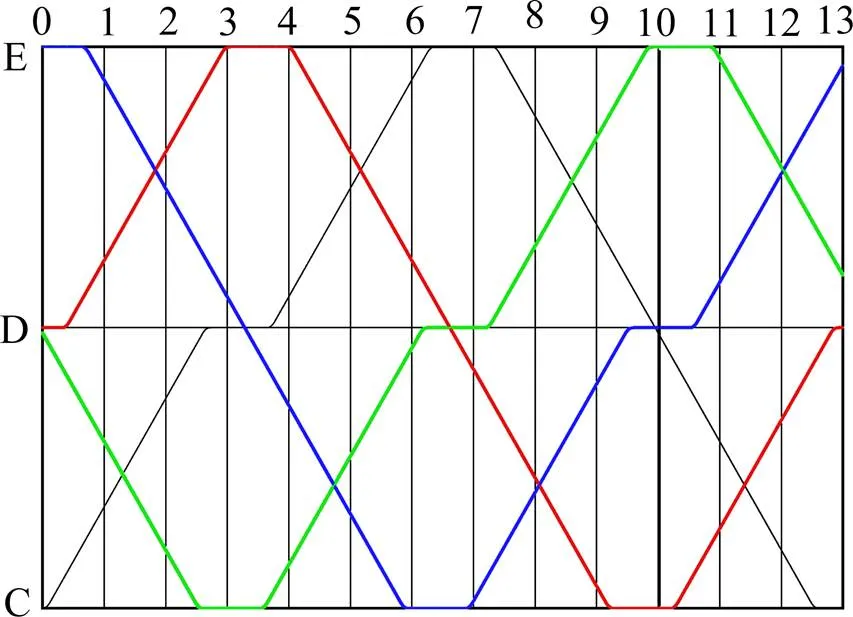
图9 列车运行图

表3 牵引变压器位置参数
由于APM系统上下行线路相互独立运行,不妨以上行线路为优化对象,采用PSO算法进行迭代计算,可以得到牵引变电所优化设计过程,如表4所示。
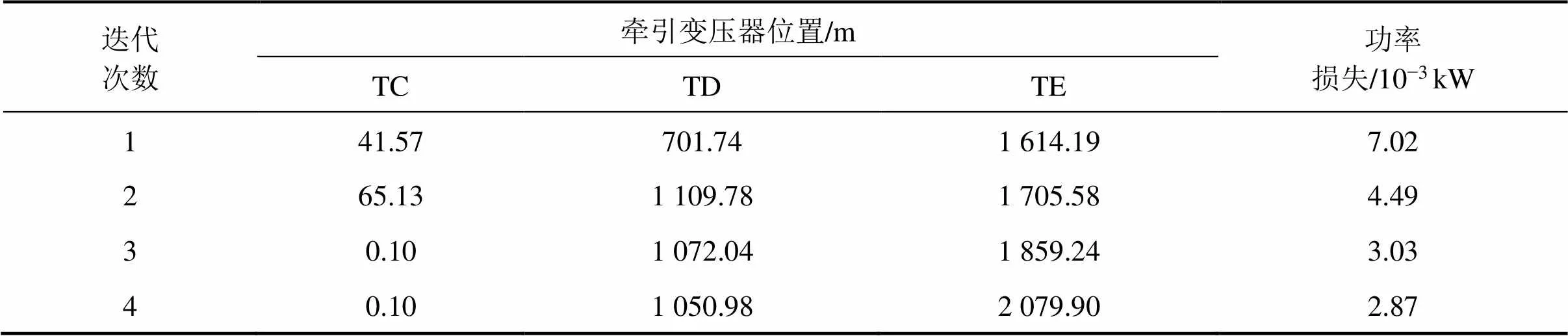
表4 供电轨功率损失优化过程
由表4可知,在对牵引变电所位置进行优化设计的过程当中,全局最优解共经历了4次更新迭代。优化设计前,供电轨平均有功功率损失为7.02×10−3kW;优化设计之后,供电轨平均有功功率损失降至2.87×10−3kW。当各变电所为最优位置时,列车运行过程中的进线电压随运行距离的变化曲线如图10所示。
当列车处于加速阶段时,由于用电功率的迅速增加,其进线电压会随之降低,最小值达到596.5 V,符合列车正常供电电压要求;当列车处于巡航阶段时,用电功率较小,进线电压变化不大,接近600 V;当列车运行位置远离变电所时,其进线电压会逐渐降低。
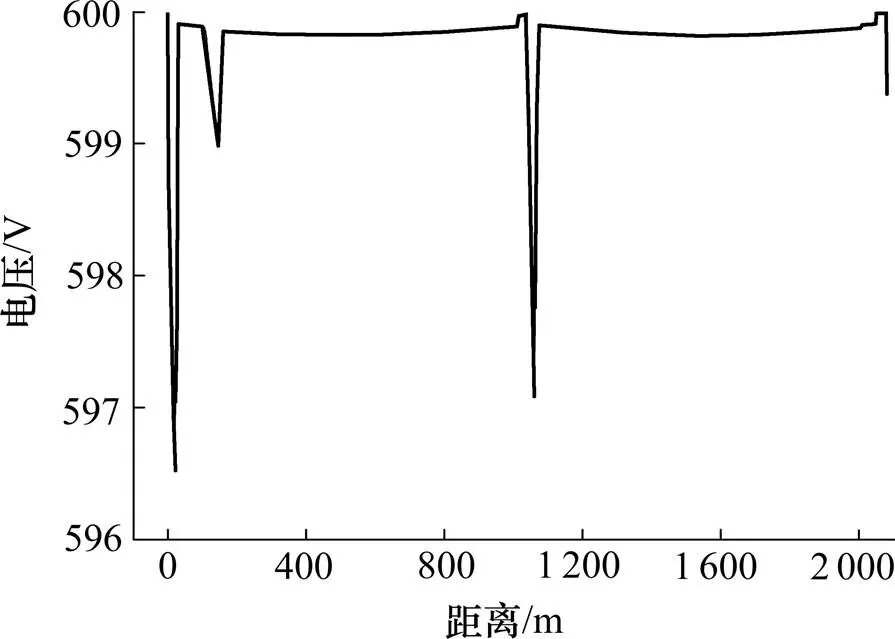
图10 列车电压变化曲线
5 结论
1) 总结APM系统列车牵引计算方法,给出列车运行受力分析方法以及运动计算方法。建立牵引供电系统仿真数学模型,并对其进行潮流分析。
2) 建立供电轨有功功率损失最小化模型,为牵引供电系统优化设计奠定了基础。
3) 采用粒子群优化算法对某机场APM线进行优化设计,仿真结果证明该优化算法能有效降低供电轨有功功率损失,具有较强的工程应用价值。
[1] 高金港, 张丽. 自动旅客捷运系统APM300试验线设计与研究[J]. 现代城市轨道交通, 2018(8): 59−62. GAO Jingang, ZHANG Li.Design and study of APM300 test track for automatic people mover[J].Modern Urban Transit, 2018(8): 59−62.
[2] 冯剑冰. 胶轮运载系统的交流牵引供电无功功率和谐波研究[J]. 城市轨道交通研究, 2012(6): 60−62. FENG Jianbing. Reactive power and harmonic of AC traction power supply system for rubber-tire transportation system[J]. Urban Mass Transit, 2012(6): 60−62.
[3] 刘娟. APM钢铝复合接触轨及配套零部件研制[J]. 电气化铁道, 2015(1): 44−46. LIU Juan. Research and development of APM steel and aluminium composite contact rail and matchable component[J]. Electric Railway, 2015(1): 44−46.
[4] Hester A R, Love G W. System modeling and simulation vs installation performance[C]// 10th International Conference on Automated People Movers, 2005: 1−12.
[5] Urien N. Energy optimization for public transportation applications[C]//Automated People Movers and Transit Systems, 2013: 404−415.
[6] Srivichai J, Ratniyomchai T, Kulworawanichpong T. APM traction power supply study: A case study of SUT hospital shuttle service[J]. International Journal of Industrial Electronics and Electrical Engineering, 2018, 6(6): 18−22.
[7] Khemkladmuk B, Leeton U, Kulworawanichpong T. A study control speed profile optimization for automated people mover[J]. International Journal of Industrial Electronics and Electrical Engineering, 2018, 6(6): 28− 31.
[8] 孙小凯. 同相贯通牵引供电系统优化设计研究[D]. 成都: 西南交通大学, 2015. SUN Xiaokai. Study on optimization design of cophase continuous traction power supply system[D]. Chengdu:Southwest Jiaotong University, 2015.
[9] LINY D, Trani A A. Airport automated people mover systems: Analysis with a hybrid computer simulation model[J].Transportation Research Record,2000, 1703(1): 45−57.
[10] 赵晓峰. 胶轮路轨全自动旅客捷运(APM)信号系统研究[J]. 城市轨道交通研究, 2016(B08): 62−66. ZHAO Xiaofeng. On automated people mover signaling system for rubber-tire concrete track[J]. Urban Mass Transit, 2016(B08): 62−66.
[11] 史海欧, 罗燕萍.广州珠江新城旅客自动输送系统(APM)设计特点[J]. 都市快轨交通, 2012, 25(4): 18−22. SHI Haiou, LUO Yanping. Design features of APM in Zhujiang new town of Guangzhou city[J]. Urban Rapid Rail Transit, 2012, 25(4): 18−22.
[12] 李群湛, 贺建闽, 李曙辉. 牵引供电系统优化设计研究[J]. 西南交通大学学报, 1992(1): 83−90. LI Qunzhan, HE Jianmin, LI Shuhui. Study of the optimization design for traction power supply system[J]. Journal of Southwest Jiaotong University, 1992(1): 83− 90.
[13] 宫衍圣. 牵引供电系统优化设计技术的应用研究[D]. 成都: 西南交通大学, 2002. GONG Yansheng. Application research on optimum design technology of traction power supply system[D]. Chengdu:Southwest Jiaotong University, 2002.
[14] 陈宏伟, 江全元. 电气化铁路牵引变电所位置及安装容量优化设计[J]. 电力系统及其自动化学报, 2016, 28(11): 104−110. CHEN Hongwei, JIANG Quanyuan.Optimization design of electrified railway traction substation and installation of capacity[J]. Proceedings of the CSU-EPSA, 2016, 28(11): 104−110.
[15] 陈民武, 许臣友, 黄文勋, 等. 基于改进粒子群算法的牵引供电系统多目标优化设计[J]. 中国铁道科学, 2016, 37(1): 85−92. CHEN Minwu, XU Chenyou, HUANG Wenxun, et al. Multi-objective optimization design of traction power supply system based on improved particle swarm algorithm[J]. China Railway Science, 2016, 37(1): 85− 92.
Load process simulation and optimization design of APM traction power supply system
XIA Shunying, WANG Lide, WANG Yin, ZHANG Cui’e, WANG Chong
(School of Electrical Engineering, Beijing Jiaotong University, Beijing 100044, China)
APM is a three-dimensional, driverless rail transit system that is usually used to undertake passenger transport tasks in large airports. At present, there are relatively few researches on APM traction power supply simulation in China. In order to assist the design of new airport APM lines, taking common rubber wheel track system as an example, the traction calculation method of trains was studied, and the power flow analysis of traction power supply network was carried out, which provides design basis for the APM traction power supply system. In order to reduce the active power loss of power supply rail and improve the utilization of electric energy, the power supply rail power loss minimization model was established, and the PSO algorithm was used to optimize the position setting of the traction substation. The test results show that the method described in this paper can effectively realize the optimization design of APM traction power supply system and has strong engineering application value.
APM; traction power supply system; simulation of load process; optimization; PSO (particle swarm optimization
U221
A
1672 − 7029(2019)09−2317 − 07
10.19713/j.cnki.43−1423/u.2019.09.025
2018−12−05
中国民用航空局重大专项资助项目(201501)
王立德(1960−),男,北京人,教授,从事电力牵引传动系统控制与仿真等研究;E−mail:ldwang@bjtu.edu.cn
(编辑 阳丽霞)
