基于模糊控制的电力机车智能撒砂控制方法
2019-03-23文小康黄景春康灿
文小康,黄景春,康灿
基于模糊控制的电力机车智能撒砂控制方法
文小康,黄景春,康灿
(西南交通大学 电气工程学院,四川 成都 610031)
在电力机车运行过程中,轮轨接触状态突然恶化时需采用增黏剂以改变轮轨黏着状态,撒砂是最常见的方法。为了使机车更好发挥牵引、制动性能,采用机车速度、蠕滑速度和轮缘加速度作为自动撒砂控制指标,以机车速度、蠕滑速度和轮缘加速度作为系统输入,以撒砂动作信号作为输出,建立模糊撒砂控制系统;然后根据系统的输出信号驱动撒砂装置阀门,实现自动撒砂。将撒砂动作信号与车轮实际空转情况进行对比,结果表明该方法能够在轮子发生空转时及时撒砂,且系统自动控制过程稳定;同时,与手动控制相比,在机车轮对发生空转或滑行期间可节约用砂。该方法综合考虑机车实际运行工况,提高撒砂控制的智能化,减少人工干预。
电力机车;黏着控制;模糊控制;撒砂控制

随着铁路的不断发展,电力机车不断地投入运营,对机车的性能要求也越来越高,由于机车需要的牵引力大,因此也要确保轮轨之间有好的黏着状态以发挥出足够的黏着率[1]。在电力机车运行过程中,机车依靠轮轨间的黏着产生黏着力,从而列车实现牵引与制动,机车黏着力的发挥与轮轨之间的黏着水平息息相关。轮轨黏着性能受到诸多因素的影响,比如树叶、油脂、冰、雪和水等[2]。当这些影响黏着性能的污染物附着在钢轨表面时,会使轮轨黏着特性急剧下降,从而导致机车轮对发生空转或滑行,造成轮轨擦伤甚至脱轨等事故[3]。在轮轨干燥、清洁的情况下,机车黏着力的发挥往往是足够的,而在轨面湿滑的情况下,黏着系数往往会大大降低,不能满足机车运行的要求。改变轮轨之间的状态可以有效地增强黏着,可以通过喷射水流或者空气去除轨道上的污染物。此外,还可以使用轮轨增黏剂的方法提高轮轨黏着性能,如通过喷射砂粒或者陶瓷粒子改善轮轨黏着状态,撒砂是最常见的黏着剂[4]。在轨面存在污染物的情况下,撒砂对于提高黏着系数,改善轨面黏着性能的效果往往是明显的。但是在机车运行过程中,撒砂会造成如下问题:影响信号系统的正常运行;增加铁路维护成本和维护量;撒砂过量会造成砂子浪费以及埋轨现象等[5]。因此,在机车运行中,希望能够优化撒砂的控制,一方面能够根据机车、线路状态进行自动撒砂控制,减少人为撒砂的不确定性,防止撒沙不及时、滞后等现象影响列车运行;另一方面,也能充分利用砂粒,减少资源浪费,降低成本[6]。为此,本文设计基于模糊控制的智能撒砂控制系统,将机车速度、蠕滑速度、轮缘加速度作为模糊控制系统的输入量,是否撒砂作为输出,从而驱动、控制撒砂设备进行撒砂,达到适时撒砂的控制效果。将空转识别方法判断出的空转信号与撒砂信号进行对比,验证本方法的有效性。
1 轮对空转识别
理论分析和大量的试验表明,黏着系数和蠕滑速度的关系如图1所示。蠕滑速度定义为轮周线速度与在钢轨接触点处的移动速度(机车车体速度)之差。当牵引力小于最大可用黏着力时,轮轨处于正常的蠕滑区,施加在车轮上的转矩通过轮轨间的蠕滑转换成驱动列车前进的牵引力;当牵引力大于最大可用黏着力时,轮轨之间的黏着状态遭到破坏,蠕滑变成真滑动,这时若不迅速降低牵引力矩或者改变黏着状态就会发生空转[12]。
组合控制法是电力机车黏着控制领域的一般方法,其结构如图2所示。它所使用的控制信号是蠕滑速度和机车加速度,整个控制系统是由机车速度估计、加速度判定和蠕滑速度判定3部分组成。

图1 典型的黏着特性曲线
机车速度估计模块计算出的参考速度采用如下定义:
当机车处于加速状态时,

当机车处于减速状态时,

式中:v是各车轴速度。
蠕滑速度判定是采用蠕滑速度来计算补偿转矩,蠕滑速度的表达式为:
式中:是车轮角速度;是车轮半径;是机车速度。如果蠕滑速度超过特定的阈值,电机转矩将会下降并持续一段时间,车轮空转停止后,牵引转矩再增加。
当所有车轮同时空转时,加速度判断部分将被激活,如果超过特定阈值,它将会降低转矩[14]。

图2 组合控制法
空转识别的目的是为了验证智能撒砂控制的可行性和有效性,如果在发生空转时能及时撒砂,说明该撒砂控制方法能够有效改善机车运行性能以及提高黏着利用。
2 基于模糊系统的撒砂控制方法
模糊控制系统包括4个组成部分:模糊数据和规则库、模糊器、模糊推理机和解模糊器。模糊控制系统用作控制器时被称为模糊控制器,模糊控制系统与传统的闭环控制系统的不同之处在于用模糊控制器代替了模拟式控制器[15]。模糊控制器适用于多种控制对象,线性的、非线性的、单变量、多变量的,由于机车运行时轮轨之间的黏着状态难以用精确的数学模型表示,故适宜用模糊控制。模糊控制器的结构如图3所示。

图3 模糊控制器结构图
2.1 控制的要求
多年来,牵引控制专家一直致力于电力牵引技术的研究,黏着控制的效果影响着牵引力的发挥,本系统采用控制撒砂以增强黏着效果,提高黏着利用。“控制撒砂”是指在轮轨接触状态较差时,降低牵引转矩不足以抑制轮对空转或滑行而采用撒砂方式增加轮轨黏着,保证牵引力的发挥和机车运行稳定性。
一般来说,撒砂是提高轮轨黏着特性的主要手段。然而,司机进行人为撒砂时,可能造成在不需要的条件下进行撒砂、撒砂过量、撒砂不及时或滞后等现象。撒砂过量或者在不需要的情况下撒砂一方面会造成砂粒的浪费,另一方面,未被碾压的砂子会阻碍后续车轮的运行,严重时可能导致踏面损伤[7];撒沙滞后或不及时可能会影响列车运行。因此进行撒砂控制的关键是能够对撒砂控制进行优化,能够模仿经验司机的操作,适时地启动撒砂。
2.2 系统结构
本文根据机车车速、蠕滑速度和轮缘加速度作为控制指标,建立一个模糊撒沙控制系统,通过该系统控制撒砂装置进行自动撒砂。该模糊控制系统是一个3输入单输出的系统,以机车速度、蠕滑速度和轮缘加速度为输入变量,输出的值进行一定转换确定是否撒砂,并作为控制信号控制撒砂设备进行撒砂。
模糊撒砂控制系统如图4所示,输入为机车速度、蠕滑速度和轮缘加速度。模糊控制器的输出为机车是否撒砂,继而撒砂控制设备开启撒砂阀门。

图4 模糊撒砂控制系统图
3 模糊撒砂控制器的设计
3.1 输入/输出量
选取模糊撒砂系统的输入量为机车速度、蠕滑速度和轮缘加速度。机车速度在5 km/h以下时,撒砂容易造成埋轨,最大速度为120 km/h,因此机车速度的论域选取为[5,120];蠕滑速度在黏着控制的作用下,一般不会超过20 km/h,因此蠕滑速度论域选取为[0,20];轮缘加速度在黏着控制作用下,如果超过5 m/s2时会立即降低牵引转矩抑制空转,因此轮缘加速度论域选取为[0,5]。
模糊变量分割的个数决定了最大可能的规则个数,模糊子集通常选取 3个或7个,而若3个输入变量均分割为7个模糊子集,则最大可能的模糊规则数为7×7×7=343条,需要确定太多的控制规则,这是比较困难的,另一方面撒砂控制器的撒砂精度要求不是很高,因此将此模糊控制器的输入变量均分为3个模糊子集:{小(S),中(M),大(B)}。
在选择模糊变量的模糊集隶属函数时,隶属函数曲线较尖的模糊子集分辨率也较高,控制灵敏度也较高;而隶属度函数曲线越平缓,控制特性比较平缓,稳定性较好。因此,当模糊子集覆盖论域范围较小的时候,选用高分辨率的隶属函数,使系统具有较好的灵敏性;当模糊子集覆盖论域大的时候,选择较平缓的隶属函数,保证系统的稳定性。
在机车速度相对较低时,撒砂倾向较大,故车速的模糊子集小(S)的隶属函数采用三角形,中(M)的隶属函数采用高斯型,大(B)的隶属函数采用梯形,机车速度隶属函数如图5。蠕滑速度是反映轮对空转的重要指标,故小(S)模糊子集采用梯形隶属函数,中(M)模糊子集的隶属函数采用高斯型,大(B)采用梯形隶属函数,蠕滑速度隶属函数如图6。轮缘加速度是反映空转变化快慢的指标,且灵敏度要求较高,要求论域覆盖完整,故从小到大依次为{小(S),中(M),大(B)},3个模糊子集均采用梯形隶属函数,轮缘加速度隶属函数如图7。

图5 机车速度隶属函数
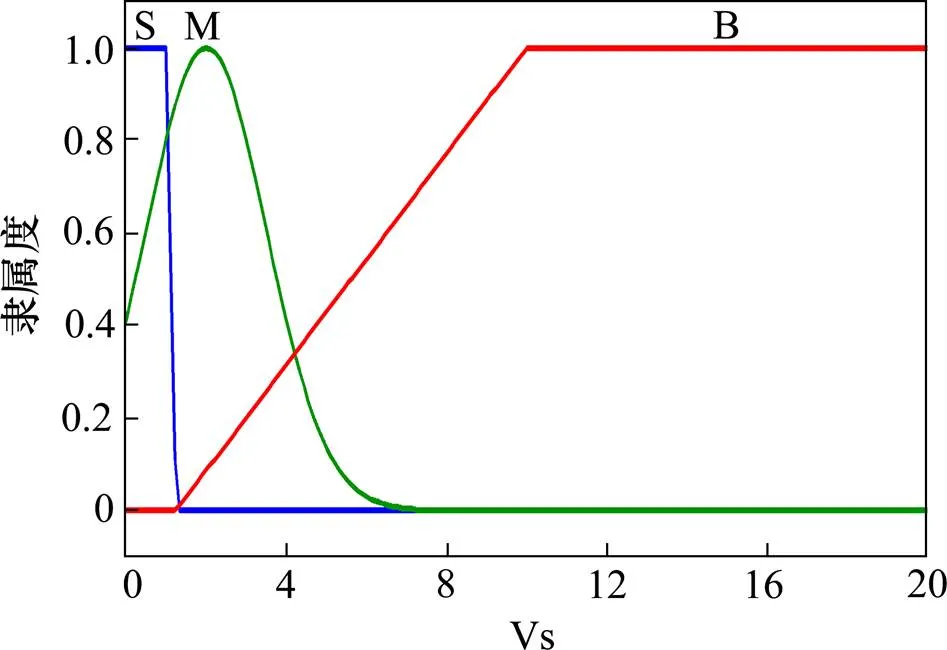
图6 蠕滑速度隶属函数

图7 轮缘加速度隶属函数
模糊撒砂控制器输出为0~1,设定模糊子集为{最小(NS),次小(NM),中(M),次大(PM),最大(PB)},隶属函数均取三角形,如图8所示。模糊撒砂控制器输出代表系统撒砂倾向值,当该值大于设定值时控制信号设为1,进行撒砂;小于等于设定值时控制信号设为0,不撒砂,控制信号最后输出用于控制撒砂设备。
隶属函数的设计是本系统控制性能是否良好的关键,在实验过程中根据实验结果需要不断地修正与优化。通过与实际空转或滑行情况进行对比,验证本设计的合理性。
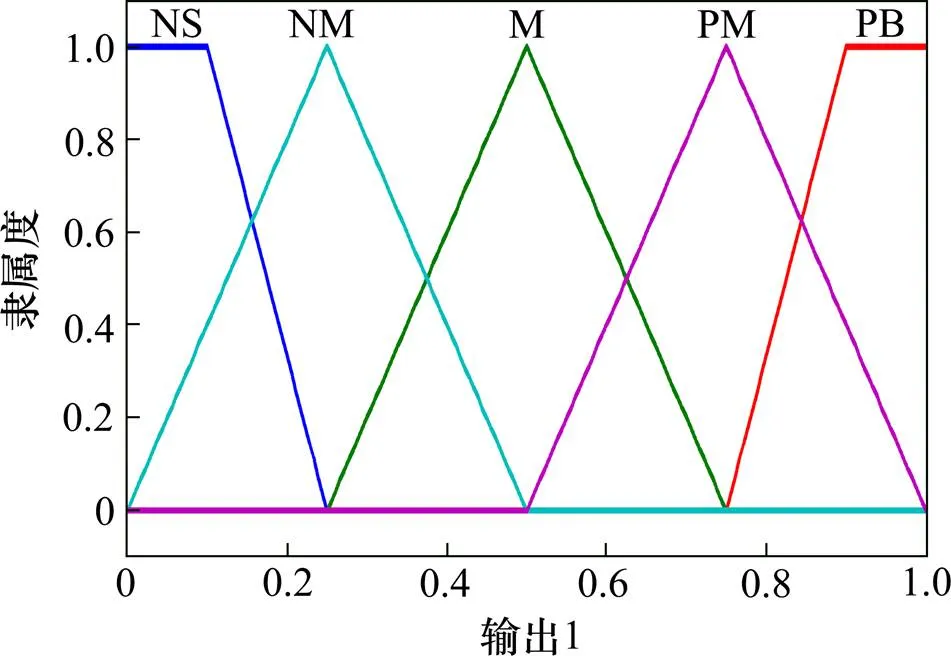
图8 控制器输出隶属函数
3.2 模糊规则
模糊控制规则时模糊系统的核心。模糊控制的规则库是由一系列的“IF-THEN”型的模糊条件句所构成的。条件句的前件为输入变量,后件为输出变量。
本文通过总结实际工程经验以及相关知识建立模糊规则库。机车速度越高,撒砂对改变轮轨黏着的影响不明显,因此撒砂的倾向越小;蠕滑速度衡量轮对空转/滑行的程度,蠕滑速度越大,即代表空转/滑行的程度越大,越需要撒砂;轮缘加速度是衡量空转变化快慢的指标,轮缘加速度越大,越倾向于撒砂。初步建立的模糊规则往往效果不是很好,需要在MATLAB平台上通过实验结果不断对模糊规则进行修正。
该系统根据机车速度、蠕滑速度和轮缘加速度均划分了3个模糊集合,故有27条规则,模糊规则如下:


3.3 软件设计
机车撒砂控制流程图如图9所示,当机车速度小于等于5 km/h时,不进行撒砂,也不进行模糊控制。当机车速度大于5 km/h时,读取机车速度、蠕滑速度数据、轮缘加速度数据,并将其输入模糊控制器,根据模糊控制器输出控制撒砂器撒砂。

图9 撒砂控制流程图
4 试验与分析
为了验证该模糊撒砂控制系统的有效性,本文基于该模糊撒砂控制系统分别对机车加速、减速过程进行撒砂控制。本文基于2组实际机车运行的加速、减速数据进行撒砂控制分析,采用模糊控制方法对机车是否需要撒砂进行判断,输出为1需要进行撒砂,反之不需要进行撒砂动作,同时也可以通过实验结果判断该方法的有效性。

图10 机车加速过程的运行状况
4.1 机车加速
机车在加速过程中,为了保证机车牵引力的有效发挥,在机车轮对发生空转时,需要启动撒砂以增加轮轨之间的黏着。机车速度、蠕滑速度、轮缘加速度曲线如图10所示,将该运行状况下的数据作为模糊撒砂控制系统的输入,得到撒砂控制信号如图11所示,空转信号如图12所示。
4.2 机车减速
机车在减速过程中,为了保证机车制动力的有效发挥,在机车轮对发生滑行时,需要启动撒砂以增加轮轨之间的黏着。机车速度、蠕滑速度和轮缘加速度曲线如图13所示,将该运行状况下的数据作为模糊撒砂控制系统的输入,得到撒砂控制信号如图14所示,空转情况如图15所示。

图11 机车加速过程的撒砂信号
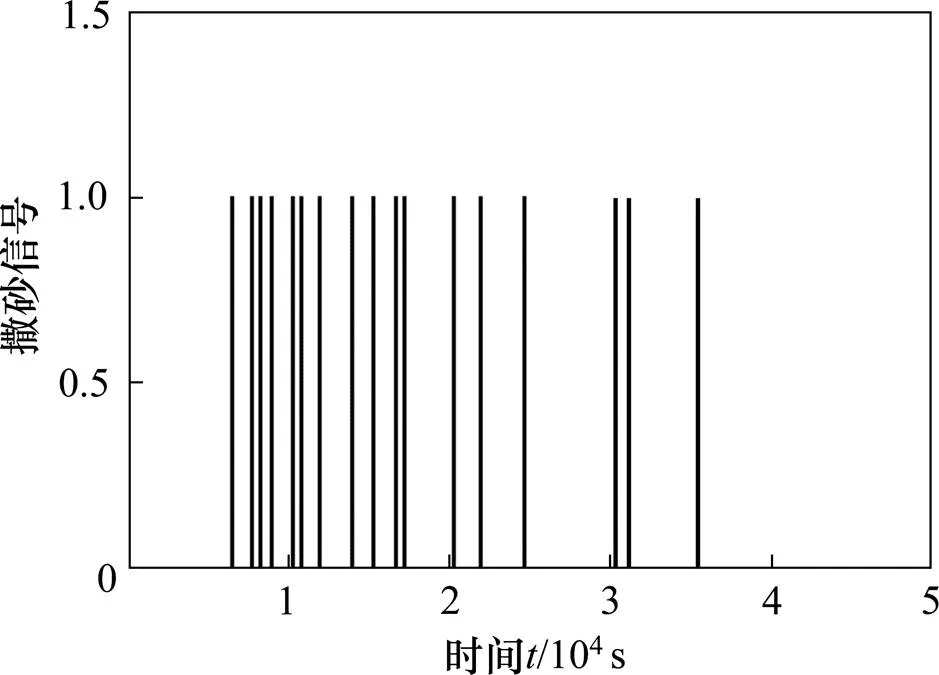
图12 机车加速过程的空转信号
从以上2组机车加速和减速过程的实验结果可以看出,当机车速度相对较低,蠕滑速度和轮缘加速度较大时,这时轮对发生空转或滑行,撒砂控制器输出撒砂信号,用于增加轮轨黏着以提高黏着利用。
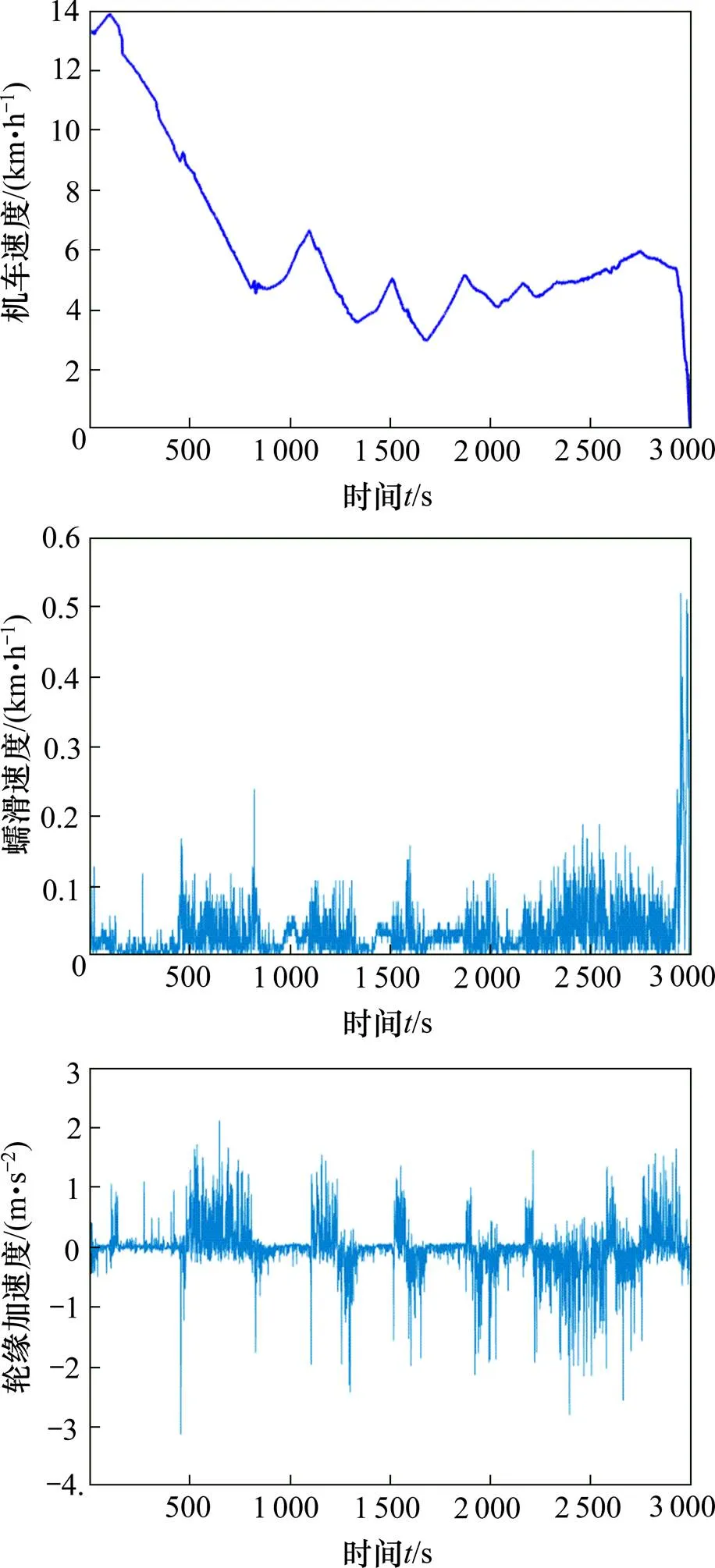
图13 机车减速过程的运行状况
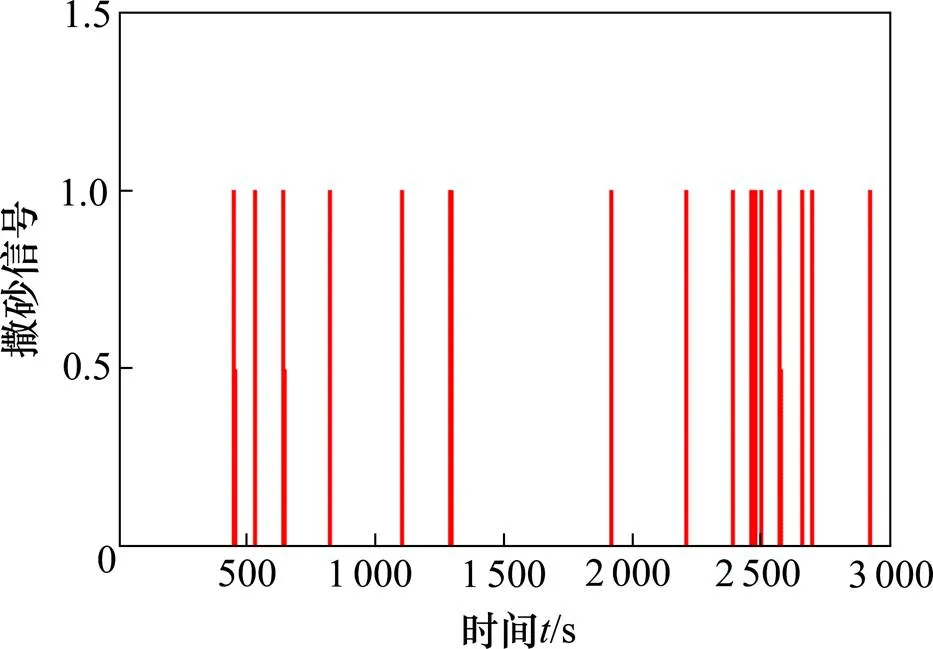
图14 机车减速过程的撒砂信号
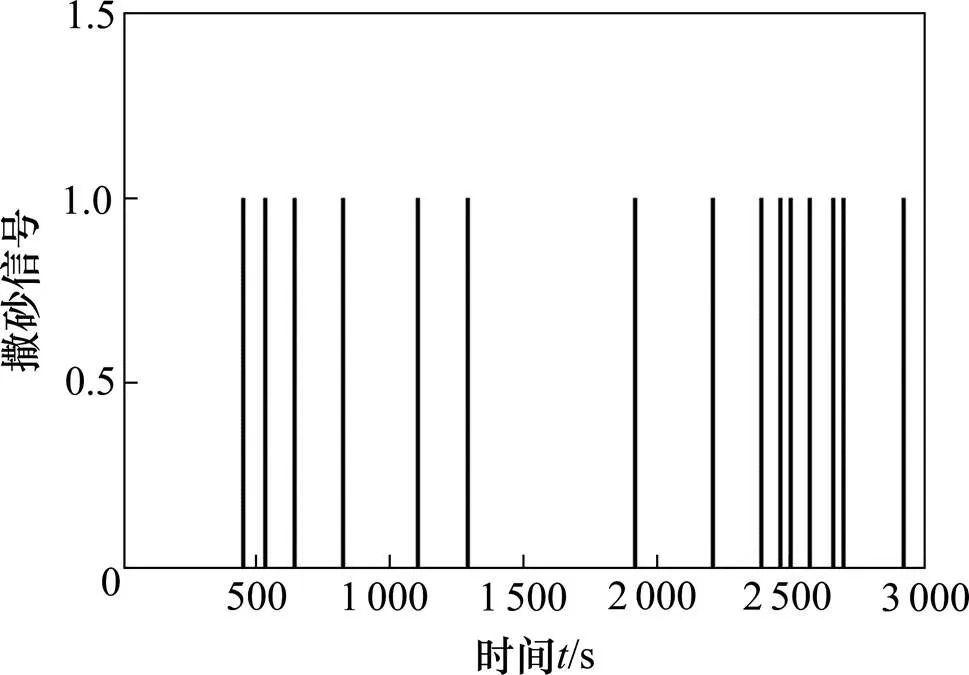
图15 机车减速过程的空转信号

表1 空转信号与撒砂信号对比
撒砂动作次数与机车空转次数对比如表1所示。在机车加速过程中,空转次数为17次,撒砂动作次数为14次,这是因为机车在高速运行过程中出现空转时撒砂不起作用,故撒砂信号无输出;在机车减速过程中,滑行次数为15次,撒砂动作次数为15次。因此,该撒砂控制系统能够有效提高机车黏着特性。
5 结论
1) 基于机车速度、蠕滑速度和机车轮缘加速度3个变量作为自动撒砂控制指标控制机车撒砂动作具有可行性,同时往往比使用单纯的蠕滑速度作为控制指标更为可靠。
2) 采用模糊系统控制机车自动撒砂,该控制方法适用于机车撒砂过程,因为该过程不能通过精确的模型确定,且环境多变。该系统采用模糊推理规则,模糊推理规则是基于总结长期经验而建立,依据输入与输出之间的关系而确立,从而使系统不受模型参数变化的影响。
3) 通过撒砂控制信号与实际空转情况对比分析,在轮对发生空转时撒砂控制能够及时撒砂,说明本文设计的控制系统较为合理。
4) 当系统运行工况变化时,可以通过修改隶属度函数调节系统性能,从而可以满足不同工况下的控制要求。
[1] 黄景春, 唐守乾, 林鹏峰, 等. 基于轨面辨识的电力机车粘着控制仿真研究[J]. 计算机仿真, 2015, 32(1): 206−210, 253. HUANG Jingchun, TANG Shouqian, LIN Pengfeng, et al. Simulation research on locomotive adhesion control based on rail identification[J]. Computer Simulation, 2015, 32(1): 206−210, 253.
[2] 申鹏, 王文建, 张鸿斐, 等. 撒沙对轮轨黏着特性的影响[J]. 机械工程学报, 2010, 46(16): 74−78. SHEN Peng, WANG Wenjian, ZHANG Hongfei, et al. Influence of sanding on wheel-rail adhesion characteristics[J]. Journal of Mechanical Engineering, 2010, 46(16): 74−78.
[3] CHEN H, Ban T, Ishida M, et al. Experimental investigation of influential factors on adhesion between wheel and rail under wet conditions[J]. Wear, 2008, 265: 1504 –1511.
[4] ZHANG Weihua, CHEN Jianzheng, WU Xuejie, et al. Wheel/rail adhesion and analysis by using full scale rollerig [J]. Wear, 2002(253): 82−88.
[5] Lewis R, Dwyer-Joyce R S, Lewis S R, et al. Tribology of the wheel-rail contact: The effect of third body materials[J]. Int J Railw Technol, 2012, 1: 167−194.
[6] Arias-Cuevas O, LI Z. Field investigations into the adhesion recovery in leaf-contaminated wheel-rail contacts with locomotive sanders[J]. Proc IMechE, Part F: J Rail Rapid Transit, 2011, 225: 443−456.
[7] LIU Y J, Tong S C. Adaptive fuzzy control for a class of unknown nonlinear dynamical systems[J]. Fuzzy Sets Syst, 2015, 263: 49−70.
[8] Lewis R, Dwyer-Joyce R S. Wear at the wheel/rail interface when sanding is used to increase adhesion [J]. Proc IMechE, Part F: J Rail Rapid Transit, 2006, 220: 29−41.
[9] Lewis R, Dwyer-Joyce RS, Lewis J. Disc machine study of contact isolation during railway track sanding[J]. Proc IMechE, Part F: J Rail Rapid Transit 2003; 217: 11–24.
[10] WANG W J, ZHANG H F, WANG H Y, et al. Study on the adhesion behavior of wheel/rail under oil, water and sanding conditions[J]. Wear, 2011, 271: 2693–2698.
[11] 吴海波, 李岚. 智能撒砂控制器的设计与研究[J]. 电脑知识与技术, 2012, 8(36): 8812−8813. WU Haibo, LI Lan. Design and research of intelligent sanding controller[J]. Computer Knowledge and Technology, 2012, 8(36): 8812−8813.
[12] 王飞宽, 徐绍龙, 宾川, 等. 层次分析法在“神华号”八轴电力机车撒沙控制中的应用[J]. 机车电传动, 2017(1): 35−40, 64. WANG Feikuan, XU Shaolong, BIN Chuan, et al. Application of analytic hierarchy process on automatic sanding control of Shenhua AC locomotive[J]. Motorcycle Electric Drive, 2017(1): 35−40, 64.
[13] 李邦国, 孙栋栋, 孙正军, 等. 和谐号动车组撒沙装置及控制[J]. 铁道机车车辆, 2011, 31(5): 70−72. LI Bangguo, SUN Dongdong, SUN Zhengjun, et al. Sanding equipment and control of China railway high-speed (CRH) electronic motor unit (EMU)[J]. Railway Locomotive & Rolling Stock, 2011, 31(5): 70−72.
[14] 黄成荣. 机车动力学若干问题研究[D]. 北京: 中国铁道科学研究院, 2015. HUANG Chengrong. Study on several problems of locomotive dynamics[D]. Beijing: China Academy of Railway Sciences, 2015.
[15] 任强, 黄景春, 张思宇. 基于模糊路况识别的电力机车粘着控制[J]. 计算机仿真, 2015, 32(3): 173−176, 182. REN Qiang, HUANG Jingchun, ZHANG Siyu. Adhesive control of electric locomotive based on fuzzy road condition recognition[J]. Computer Simulation, 2015, 32(3): 173−176, 182.
[16] 于荣泉. 车轮踏面滚动接触疲劳损伤研究[D]. 北京: 北京交通大学, 2016. YU Rongquan. Study on rolling contact fatigue damage of wheel tread[D]. Beijing: Beijing Jiaotong University, 2016.
[17] YAO Y, ZHANG H J, LI Y M, et al. The dynamic study of locomotives under saturated adhesion[J]. Veh Syst Dyn, 2011, 49(8): 1321−1338.
[18] TIAN Y, Daniel W J T, LIU S, et al. Investigation of the impact of locomotive creep control on wear under changing contact conditions[J]. Veh Syst Dyn, 2015, 53(5): 692−709.
[19] TIAN Y, Daniel W J T, LIU S, et al. Comparison of PI and fuzzy logic based sliding mode locomotive creep controls with change of rail-wheel contact conditions[J]. Int J Rail Transp, 2015, 3(1): 40−59.
[20] Hubbard P D, Ward C, Dixon R, et al. Models for estimation of creep forces in the wheel/rail contact under varying adhesion levels[J]. Veh Syst Dyn, 2014, 52(Suppl): 370−386.
Intelligent sanding control method for electric locomotive based on fuzzy control
WEN Xiaokang, HUANG Jingchun, KANG Can
(School of Electrical Engineering, Southwest Jiaotong University, Chengdu 610031, China)
In the operation of electric locomotives, when the contact state between the wheel and rail suddenly deteriorates, a adhesive is needed to change the sticking state between the wheel and rail. Sanding is the most common method. In order to make the locomotive better perform traction and braking performance, this paper used locomotive speed, creep speed and rim acceleration as the control indicators of automatic sanding. The locomotive speed, creep speed and rim acceleration were used as the input of the system. The sand motion signal was used as the output of the system to establish a fuzzy sand control system; then the valve of the sanding device was driven according to the output signal of the system to achieve automatic sanding. In this paper, the sanding action signal was compared with the actual idling of the wheel. The results show that the method can sprinkle sand in time when the wheel of the locomotive is idling, and the system automatic control process is stable; at the same time, compared with the manual control, the wheel of the locomotive sand can be saved during idling or taxiing. The method comprehensively considers the actual operating conditions of the locomotive, improves the intelligence of the sand control, and reduces manual intervention.
electric locomotive; adhesion control; fuzzy control; sanding control
U264.7+6
A
1672 − 7029(2019)09− 2304 − 08
10.19713/j.cnki.43−1423/u.2019.09.023
2018−11−24
国家自然科学基金资助项目(61773323)
黄景春(1973−),男,吉林大安人,副教授,博士,从事牵引传动控制,机车黏着控制方面研究;E−mail:jchuang@home.swjtu.edu.cn
(编辑 阳丽霞)
