滑坡深层位移磁定位测量方法研究
2019-03-22何云飞汪超盛
何云飞 吴 剑 汪超盛 聂 宁
(三峡大学 三峡库区地质灾害教育部重点实验室,湖北 宜昌 443002)
滑坡地质灾害是最为普遍的地质灾害类型,监测预警是应对滑坡地质灾害的主要工程措施之一.滑坡监测主要的监测对象是滑坡体的位移,其中包括滑坡地表位移和深部位移.对于大型滑坡,深部位移监测可以直接反映滑移面的滑动情况,其监测预警意义重大,所以近些年深部监测技术的研究一直是滑坡监测技术研究中的热点.
目前滑坡深部位移监测主要采用的主要仪器是测斜仪[1],测斜仪主要是通过在测斜管中测量不同深度测斜管的倾斜角来解算整个测斜孔不同深度的位移.为了提高滑坡深部位移监测的自动化水平,先后有多种监测技术引入到滑坡深层位移监测领域.比如同轴电缆时域反射技术(TDR,Time-Domain Reflectometry)[2]、阵列式位移计(SAA,Shape Acceleration Array)[3]以及基于霍尔效应的地下位移测量技术[4].尽管这些新的技术方法的基本测量原理千差万别,但都是测量监测孔内不同深度的偏移量,其解算滑坡深部位移的方法是相同的.在解算滑坡深部累计位移曲线时都要以滑带以下基岩作为位移起算的基点,如果滑坡滑移距离较大,监测孔或监测管被剪断,那么监测孔将失去解算基点,监测孔失效废弃.所以以上监测方法在滑坡出现大位移情况下,难以完成对滑坡深部位移的连续监测.
对滑坡深部位移的监测,也可采用光纤光栅传感技术[5],主要利用光纤光栅应变管对滑坡进行监测.将光纤光栅应变管埋入滑坡体内部,通过监测应变管变形来监测滑坡.但此方法造价高、工艺复杂、受温度和光纤光栅传感器粘贴质量的影响较为严重、光纤光栅传感器的组网方式有待进一步研究.
很多大型滑坡在深部接近基岩位置存在单一滑移面,滑移面上部滑体大致保持平动[6].而滑带厚度通常在0.2~1.0 m范围内,这意味着如果在滑带上部的监测孔内安装仪器监测滑体滑动,监测孔内的仪器不会被破坏.这为使用磁定位技术监测滑坡深部位移提供了条件.文献[7]根据磁定位原理探索采用磁定位技术对滑坡深部位移进行测量,开展了相关试验,但其试验方案未考虑地磁以及环境磁场对磁信号的影响,需要进一步改进.
1 差分磁定位方法
为消除地磁以及监测孔周边环境磁场对测量目标磁体的影响,需要布置一对磁传感器同时测量目标磁极磁场,如果地磁或环境磁场强度在一对磁传感器位置相同,那么通过差分相减就可以消除地磁以及环境磁场对目标磁极磁场的影响,即差分磁定位方法.
1.1 差分磁定位布测方案
图1是采用差分磁定位方法的测量装置在监测孔中布置图.测量装置主要由两部分构成,分别是安装固定在基岩中的目标磁极和滑带以上的磁场探测仪器.目标磁极采用柱状永磁体,由于目标磁极在基岩中,在监测孔剪断后,目标磁极的磁场不会移动不会消失,磁场探测仪器可以通过测量目标磁极的局部磁场来确定滑体相对基岩的滑动位移.
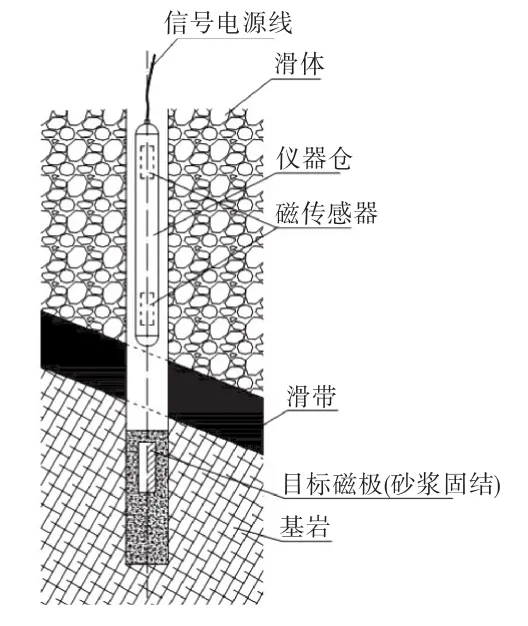
图1 监测孔内装置布置图
在安装目标磁极前应明确滑坡深部滑带位置,确保目标磁极安装在滑带以下,处于基岩之中,不能随滑体移动.同时在保证目标磁极处于滑带以下的前提下,应尽量使目标磁极贴近滑带,因为磁传感器距离磁极越近,测量的磁场信号越强.
滑带以上的磁场探测仪器的核心是两个磁传感器,两个磁传感器在仪器仓中保持测量方向相同间距固定.由于两个磁传感器的测量方向一致,那么在两个磁传感器位置测量到的地磁或环境磁场分量应相同,两个磁传感器测量值的差分量应可消除地磁以及环境磁场的影响.可通过标定试验确定两个磁传感器测量信号的差分量与目标磁极的位置之间的关系,并以此解算磁场探测仪器与目标磁极之间的位置关系.
1.2 磁场梯度与磁极位置关系的推导
差分磁定位布测方案中两个磁传感器的间距是固定的,因此两个位置测量信号差分值实际上是磁极磁场的梯度.如果考虑到作为目标磁极的永磁体尺寸较小,可以采用磁偶极子静磁场公式来分析目标磁极周围磁场梯度的变化规律.
1.2.1 磁偶极子的静磁场公式
图2中永磁体O作为坐标原点,竖直向上为Z轴正方向,水平面为OXY面,以水平向右为Y轴正方向,垂直于Y轴水平向外为X轴的正方向,P为磁极周围某一点,P点坐标分别为(x,y,z).
设O点到P点的矢径为,如果原点O到场点P的距离r远大于磁极的尺寸,可将磁极近似为磁偶极子,设磁矩矢量为与Z轴正方向的夹角为θ在OXY平面上的投影与X轴正方向的夹角为φ,磁矩大小为Pm.根据磁偶极子磁场的计算公式,P
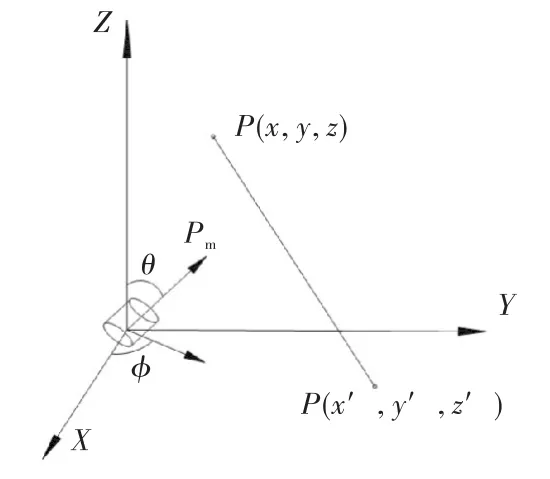
图2 磁偶极子
点处的磁场强度值B的矢量表达式为:

式中,μ0为真空磁导率
将式(1)在空间坐标系中分解,并将各个分量带入,简化后各个方向磁场强度值表达式见式(2):
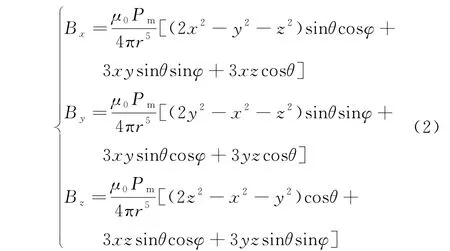
式(2)即为某磁极周围任一点的磁场强度分量的理论计算公式.
1.2.2 磁场梯度与磁极位置关系
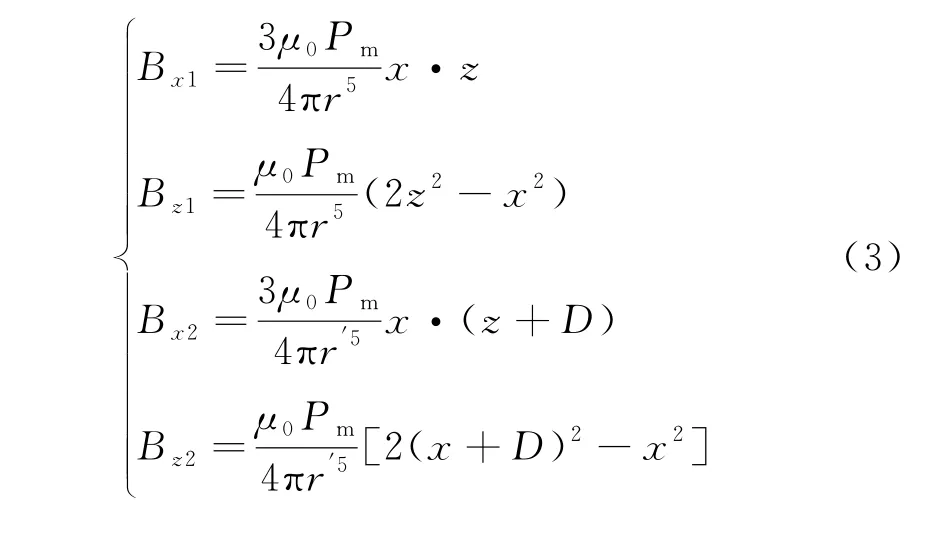
在测量时总共可以从一对三维磁通门传感器采集到6组磁场强度值,分别是B x1、B x2、B y1、B y2、B z1、B z2,安装磁传感器时可以选择B x或B y测向与磁极的横向变形方向一致.如果选择B x测轴,那么B x1、B x2、B z1、B z2在下滑过程中会产生明显变化,而B y1、B y2不会产生明显变化,因此解算深部位移时,只需要B x1、B x2、B z1、B z2的测量值.根据图1中磁极和磁传感器的位置关系可以简化B x1、B x2、B z1、B z2的表达式为其中,x是磁传感器相对于磁极水平方向的移动距离,因滑坡体滑动时滑面以上的滑体保持平移运动,所以公式中两个传感器的x取相同值.z是下部磁传感器相对于磁极竖直向距离,Pm磁矩,μ0是磁导率,D是两个磁传感器的距离,
将两个磁传感器位置的B x和B z分量相减即得到目标磁极在两个磁传感器位置的磁场强度差分量ΔB x和ΔB z.图3是ΔB x和ΔB z磁极沿X轴移动时的变化曲线.观察变化曲线可以发现,ΔB x变化曲线在(-0.5,0.5)这个区间曲线斜率最大,ΔB z变化曲线在(0.2,1.2)这个区间曲线斜率最大.曲线斜率越大,意味着磁极移动同样的距离,相应的磁信号变化量越大,越容易辨识磁极的位移.所以磁定位方法不同于大多数位移测量手段,其测量磁信号与对应位移量是基于向量空间的非线性关系,其关系曲线的标定更为复杂.

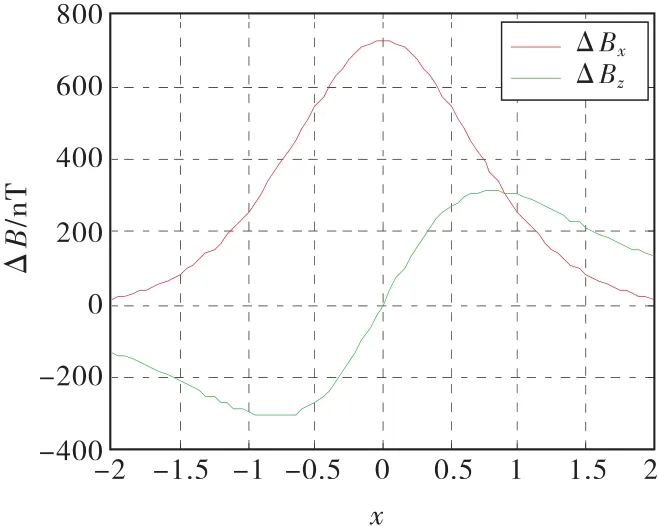
图3 ΔB x和ΔB z随磁极移动的变化曲线
2 室内试验
为了验证差分磁定位方法的可行性,在室内模拟磁传感器相对目标磁极移动过程,测量磁极周围磁场梯度,评价差分信号的辨识精度.
试验以钕铁硼(Nd-Fe-B)强磁铁作为目标磁极,磁极由5个直径为30 mm,厚度为30 mm的柱状磁铁串成一个长150 mm的柱状磁铁.采集磁信号的传感器采用MSFG-3C三通道磁通门磁传感器,其可测量3个垂直方向的磁场强度,测量精度1 n T.两个磁传感器与磁极位置关系以及磁极移动后的位置关系如图4所示.其中磁传感器间距定为1.5 m,磁传感器连线方向定为Z方向.沿Z方向距离a位置放置磁极,a距离是目标磁极与较近的磁传感器的距离.a越大,磁定位系统可以适应滑带厚度更大的滑坡.试验中垂直于Z方向移动磁极距离b位置,这代表的是滑坡相对于基岩的滑动.磁极移动到不同位置,两个磁传感器测量采集Z向的磁场强度信号,计算两个信号的差值.
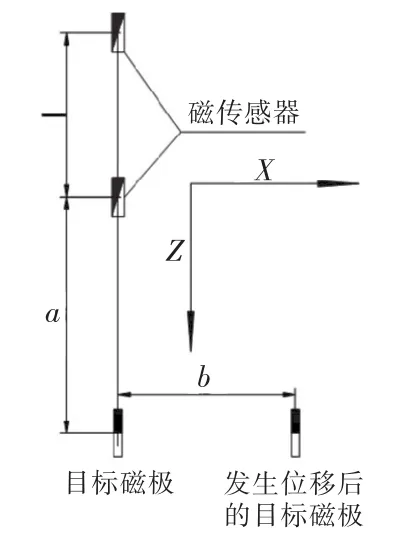
图4 室内试验磁极与磁传感器的位置关系
表1是在a分别为1.5 m、2.0 m和2.5 m情况下横向移动磁极,两个磁传感器测量的Z向磁场强度差分值.
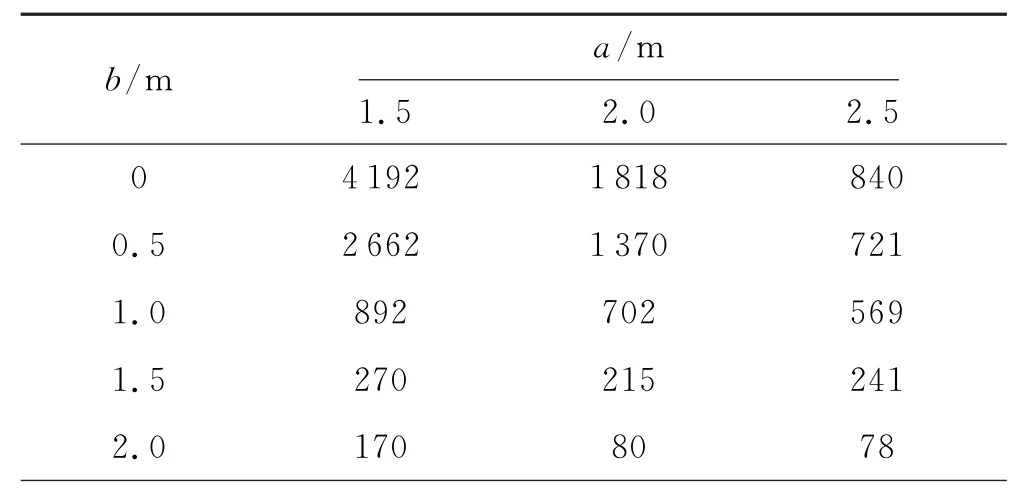
表1 Z向磁场强度差分值 (单位:n T)
b从0到0.5 m这段距离内,Z向磁场强度差分值从4 192 n T变化到2 662 n T,变化量为1 530 n T.试验发现在室内试验环境地磁及环境磁场稳定的情况下,Z向磁场强度差分值本身的系统噪声水平小于10 n T,这意味着超过10 n T的信号变化是可辨识的位移信号.那么在0到0.5 m这段距离内通过测量Z向磁场强度差分信号可辨识的位移精度=500 mm×10 n T/1 530 n T=3.3 mm.同理可计算0.5~1.0m范围的平均可以辨识的位移精度2.8 mm.
表2是a取不同距离情况下不同位移区间可以辨识的位移精度.
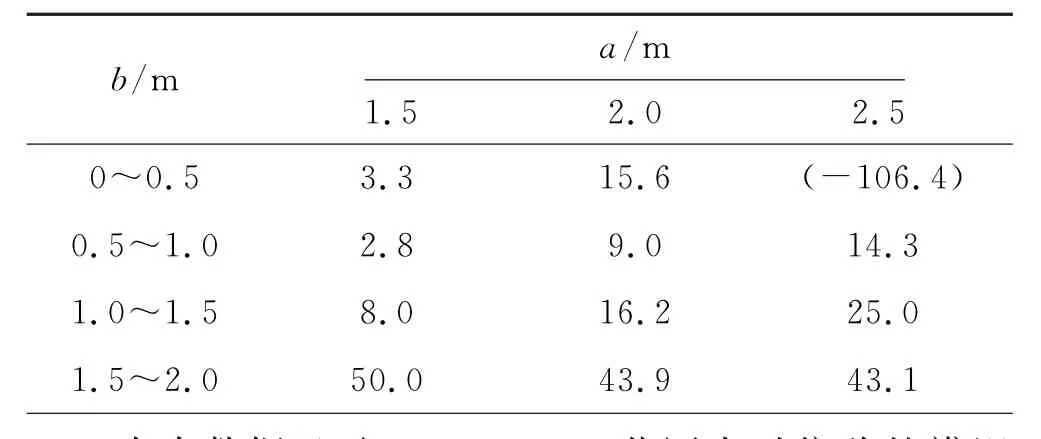
表2 平均可辨识位移量 (单位:mm)
表中数据显示0.5~1.0 m范围内对位移的辨识精度最佳,这是因为在这个位移区间,Z向的磁场强度变化最为显著.而在0~0.5 m范围内,由于0附近Z向磁场强度变化平缓,这一段的位移辨识精度低于0.5~1.0 m范围内的辨识精度,这与图3中Z向磁场强度差分值的变化曲线是相符的.根据表2的数据,可以确定通过测量目标磁极周围磁场强度梯度值(尤其Z向磁场强度)可以分辨出目标磁极的X向移动,分辨精度在0~1.0 m位移范围内小于±2 mm,在1.0~1.5 m范围内小于±5 mm.
3 结 论
1)为解决滑坡深部位移监测孔断孔失效无法连续监测滑坡深部大位移的问题,结合滑坡深部监测环境,提出了差分磁定位布测方案;
2)基于磁偶极子周围磁场的理论计算公式,推导了磁偶极子周围磁场梯度公式,确定差分磁定位方法中磁场强度差分值的变化特征;
3)室内试验模拟了监测孔中磁极和磁传感器的空间关系,通过移动磁极,记录观察磁场强度的变化.通过分析,监测孔中如果磁极与磁传感器距离为1.5 m,磁极垂直于钻孔移动,在0~1.0 m位移范围内分辨精度小于±2 mm,而在1.0~1.5 m范围内分辨精度小于±5 mm.