强度混合动力系统换挡器及其控制策略设计
2019-03-22于海生
于海生
(科力远混合动力技术有限公司上海分公司,上海 201501)
某新型强度混合动力汽车采用混联式传动结构,通过双电机双行星排动力分流系统[1-2],将来自发动机的能量合理分配给电机和驱动轴,并通过调节动力分流系统中两个电机的转速使得该系统类似无级变速器一样工作,也称其为电子无级变速器。该混合动力系统由于没有与传统换挡器的机械连接,且传统换挡器也无法匹配和满足其结构和工作模式,因此需要设计新的电子换挡器来满足混合动力系统的换挡需求。
电子换挡器与混合动力系统没有直接的机械连接,而是通过混合动力电控单元ECU采集当前电子换挡器发送的挡位位置传感器信号,经分析计算后,判断其当前挡位状态,并根据各挡位下汽车行驶状态的不同发送指令控制混合动力系统的运行模式。目前电子换挡器在丰田汽车公司THS混合动力系统[3,4]上得到了成熟的应用,但是其在中国汽车制造公司的应用还未得到普及,且中国对电子换挡器及其控制策略的设计方法也少有研究。本文基于强度混合动力系统的结构和工作模式,设计可匹配和满足其工作的电子换挡器及其控制策略,并通过Simulink系统建模[5-6]和MotoTron快速控制原型开发工具[7-8]对电子换挡器及其控制策略的设计做试验验证。
1 某强度混合动力系统
图1为某强度混合动力系统结构简图。该系统采用具有多自由度、输入输出灵活可控以及结构紧凑、体积小、速比大等优点的行星齿轮机构,将来自发动机的能量合理分配,并通过调节电机MG1和电机MG2的转速和扭矩以平衡发动机负荷,降低整车油耗和排放。该系统通过分析和判断当前换挡器挡位状态、加速和制动踏板开度以及整车系统状态和运行工况,可以形成由电机MG1单独驱动或电机MG2单独驱动或双电机联合驱动的纯电动模式,以及由发动机和双电机共同驱动的混合动力模式。
2 换挡器设计
2.1 换挡器结构设计
根据混合动力系统的工作模式,结合驾驶员的驾驶意图,判断整车的运行状态应包括前进行驶状态、倒车行驶状态、动力中断状态和驻车状态,相应地在换挡器中设立前进挡、倒车挡、空挡和驻车挡。前进挡或倒车挡表明驾驶员有驱动车辆向前方或后方行驶的意图,驾驶员可以在该挡位下通过对加速踏板和制动踏板的操作,经混合动力电控单元ECU的系统控制策略,决定动力总成的动力输出,改变或维持整车前进或倒车的行驶状态。空挡表明驾驶员有切断整车动力输出的意图,在空挡下驾驶员无法通过对加速踏板的操作来控制和改变整车动力输出。空挡作为前进挡、倒车挡和驻车挡三者之间相互切换的过渡挡位,可以避免前进挡和倒车挡切换时,整车行使惯性对整车动力系统和行驶系造成的破坏,以及在进入驻车状态后整车动力系统对驻车机构产生的持续滑磨。此外,空挡作为换挡器故障或整车故障时的入口挡位,可以保证整车安全。驻车挡表明驾驶员有使车辆保持静止或转入静止的意图,整车动力中断,同时通过驻车机构对动力输出轴产生一定的驻车制动力。混合动力电控单元ECU根据当前的整车运行状态判断是否对驻车请求信号作出响应,以决定是否控制驻车机构锁止动力输出轴使得整车进入驻车状态。
图2为电子换挡器结构示意图。由图2可知,电子换挡器共有5个挡位:原始挡位O、空挡N、前进挡D、倒车挡R以及驻车挡P。换挡手柄始终处于O挡位置,当拨动换挡器手柄至其他任意挡位后,换挡器手柄都会自动回归O挡位置。

图2 电子换挡器结构示意图
2.2 换挡器逻辑
为了判断当前换挡器手柄所处的挡位位置,在换挡器中设计2路位置传感器X1和X2,通过采集换挡器手柄所处各挡位位置时2路位置传感器的电压信号x1和x2,经混合动力电控单元ECU分析计算后,得到与各挡位位置相对应的数值y,以判断当前的换挡器手柄位置。换挡器手柄位置与2路位置传感器电压信号对照如表1所示,对应换挡器手柄位置y值1为N挡,2为D挡,3为R挡,4为P挡,0为O挡。

表1 手柄位置与传感器信号对照表
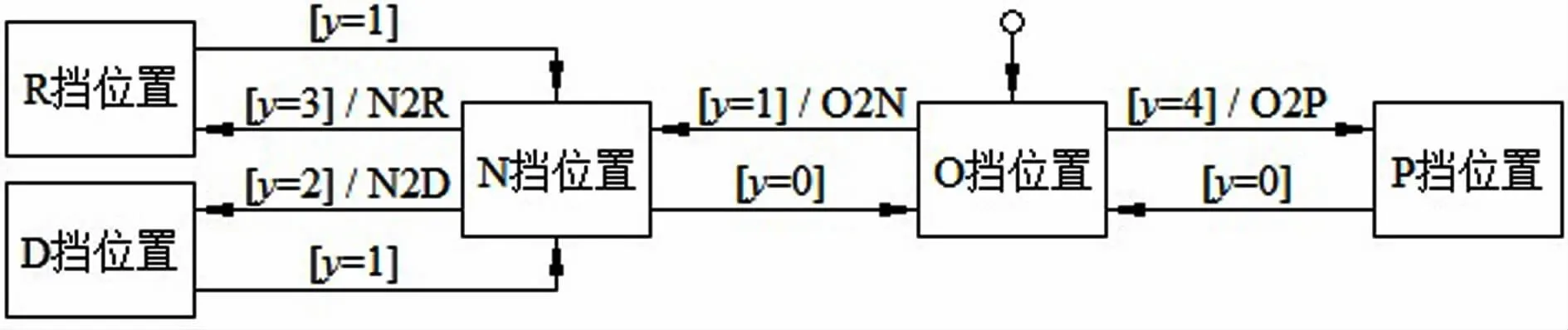
图3 换挡器逻辑
换挡器逻辑如图3所示。换挡器手柄处于O挡初始位置,当拨动手柄至N挡位置时,系统检测2路位置传感器的电压信号,经ECU分析计算后,得到y为1,系统认定换挡器手柄已进入N挡位置,并执行O挡至N挡的状态切换程序O2N,系统工作在N挡状态下,而后换挡手柄自动从N挡回归O挡位置,y为0,但不再执行挡位状态切换程序,系统仍保持在N挡状态下运行。在系统允许的工况下,若要使系统进入前进挡D状态下运行,则拨动换挡器手柄从O挡至D挡位置,手柄需先经过N挡再进入D挡,ECU分析2路位置传感器电压信号,得到y为2,系统认定换挡手柄已进入D挡位置,并执行N挡至D挡的状态切换程序N2D,系统进入D挡状态,而后换挡器手柄自动经N挡回归O挡位置,但不再执行挡位状态切换程序,不改变当前的挡位状态,系统仍保持在D挡状态下运行。
3 控制策略设计
3.1 控制策略
换挡器系统控制策略的设计应能满足驾驶员正常的换挡需求,并且能够避免因驾驶员的误操作而导致的对整车动力系统、行驶系和驻车机构造成的损坏,保证行车安全。换挡器系统控制策略简图如图4所示,其中v表示整车车速,α表示制动踏板开度。

图4 系统控制策略简图
整车在正常情况下上电完成后默认保持在P挡驻车状态下,驻车机构锁止并保持整车处于静止状态,且系统无动力输出。为防止驻车机构对动力系统和行驶系造成的损坏,在整车运行前必须先退出P挡驻车状态,取消驻车机构对动力输出轴的锁止作用。在整车车速v<1 km/h,且制动踏板开度α>30%时,拨动换挡器手柄至D挡或R挡,即执行N2D或N2R挡位状态切换程序,或在驻车状态下直接拨动换挡器手柄至N挡,即执行O2N挡位状态切换程序,系统都会打开驻车机构,系统从P挡驻车状态进入D挡、R挡或N挡状态下运行。为避免整车运动惯性对动力系统和行驶系造成的冲击和损坏,禁止前进挡D挡与倒车挡R挡之间进行直接互换,只有在整车车速v<1 km/h且制动踏板开度α>30%的情况下,才能够相互切换。整车在D挡或R挡动力挡位状态下运行时,只要拨动换挡器手柄至N挡位置,即执行O2N挡位状态切换程序,系统即进入空挡状态,整车动力中断。
驻车挡P挡的响应根据混合动力电控单元ECU通过当前的整车运行状态所决定。整车在中高速行驶时,拨动换挡器手柄至P挡位置,系统不会响应P挡信号,仍将保持当前的挡位运行状态。当车速v<5 km/h时,拨动换挡器手柄至P挡位置,系统才会从当前动力挡位进入空挡,动力中断,整车滑行,并保持P挡信号,直至车速v<1 km/h时,系统控制驻车机构锁止动力输出轴,整车进入P挡驻车状态。整车在车速5 km/h以下P挡滑行期间,拨动换挡器手柄进入当前整车状态允许的动力挡位,都将取消P挡保持信号,整车重新获得动力。
3.2 故障冗余
在整车行驶过程中,为防止因电子换挡器2路位置传感器故障、挡位识别错误、信号传输错误等导致系统对当前挡位状态的错误判断,从而致使挡位状态与当前汽车行驶工况不符,影响行车安全,因此需要对2路位置传感器信号的识别与传输作故障冗余处理,保证电子换挡器挡位信号的可靠性。当电子换挡器的2路位置传感器电压信号与系统正常工作时的信号不匹配或者识别错误时,系统从当前动力挡位自动进入空挡状态,动力中断,保证行车安全。此外,在整车行驶过程中为避免出现跳挡而导致整车运行模式改变,并致使动力系统和行驶系受损,影响行车安全,因此需对换挡器手柄在目标挡位上的停留时间作冗余处理。设定拨动换挡器手柄进入目标挡位时,若在目标挡位上停留时间小于0.1 s,或者由于2路位置传感器故障导致的信号在0.1 s以内的短暂脉冲跳变,即认定为跳挡,为保证行车安全,系统保持当前挡位状态不变;若停留时间在0.1~0.5 s,即认定为换挡过快,为保证行车安全并配合驾驶员的换挡意图,系统进入空挡,整车动力中断,直至重新拨动换挡器手柄至目标挡位且停留时间在0.5 s以上,系统才能认定已进入目标挡位状态。
4 试验验证
4.1 试验控制系统
通过Simulink建模工具将换挡器逻辑、控制策略及故障冗余算法转变成系统控制模型,用于对该换挡器及其控制策略设计方法的试验验证,系统控制模型如图5所示。系统通过信号输入模块Signal_input输入整车车速v、制动踏板开度α以及2路位置传感器电压信号x1和x2,经换挡器逻辑模块Shift_logic判断当前换挡器手柄所在的挡位位置并执行相应的挡位状态切换程序,再通过系统控制策略及故障冗余模块Control_strategy输出当前挡位状态s。

图5 系统控制模型
通过MotoTron快速控制原型开发工具将系统控制模型编译成代码后刷写进混合动力电控单元ECU中,构成快速控制原型测试系统,并通过台架试验验证换挡器及其控制策略设计方法的正确性和可行性[9-10]。试验台架控制简图如图6所示,ECU控制负载电机以模拟整车车速,通过电子换挡器发送的2路位置传感器电压信号,经换挡器逻辑、控制策略及故障冗余算法判断当前的挡位状态并控制混合动力系统运行在相应的工作模式下。

图6 试验台架控制简图
4.2 试验结果分析
试验开始系统上电后默认进入P挡驻车状态;拨动换挡器手柄至前进挡D位置,系统检测到制动踏板开度α为0,不符合挡位状态切换条件,因此不进入D挡状态,系统仍保持在P挡驻车状态下;操作制动踏板至50%开度的同时再次拨动换挡器手柄至D挡位置,系统打开驻车机构,进入D挡状态运行,松开制动踏板,车速缓慢增加,操作加速踏板至一定开度,保持系统加速状态;拨动换挡器手柄至P挡位置,由于此刻车速较高,系统不响应P挡信号,因此仍保持在D挡状态下运行;松开加速踏板的同时拨动换挡器手柄至N挡位置,系统进入空挡,动力中断,减速滑行;重新拨动换挡器手柄至D挡位置,系统进入D挡,重新获得动力;操作制动踏板至20%开度,系统减速,待车速<5 km/h时,拨动换挡器手柄至P挡位置,系统进入空挡,动力中断,直至车速<1 km/h时,系统控制驻车机构锁止动力输出轴,进入驻车状态。输入信号整车车速v和制动踏板开度α以及2路位置传感器电压信号x1和x2如图7、图8所示,输出信号换挡器手柄位置y和挡位状态s如图9所示。

图7 整车车速v和制动踏板开度α信号
5 结论
本文基于混合动力系统的结构和工作模式,设计了可匹配该系统的电子换挡器及其控制策略,通过建立控制模型并采用快速控制原型的方式对设计方法进行试验验证,试验结果表明。
1)换挡器及换挡器逻辑的设计可匹配混合动力系统的结构和工作模式,满足驾驶员正常的换挡需求。
2)换挡器控制策略及故障冗余算法的设计,可避免因驾驶员换挡误操作导致的整车挡位状态和行驶状态的改变以及对整车动力系统和传动系统造成的冲击和损坏,保证系统控制的可靠性和整车行车安全。
