雷达探测“蜂群”无人机作战效能评估
2019-03-19焦士俊王冰切刘剑豪
焦士俊,刘 锐,王冰切,刘剑豪
(空军预警学院,湖北 武汉 430019)
0 引 言
自2014年美军第3次抵消战略首次提及集群式无人机作战概念以来,“蜂群”无人机凭借其突防能力强、效费比高、智能协同、风险低等优势,引起世界各军事强国的高度重视,但从目前的发展程度看,各国反无人机“蜂群”技术、系统的研发仍然处于起步阶段,并且相对独立分散。在众多应对措施中,探测能力尤为关键,因此如何有效评价不同手段对“蜂群”无人机的探测能力是当前需要研究的一个问题[1-2]。
目前对“蜂群”无人机探测手段主要有雷达、无线电和光电探测,其中雷达探测技战术方面相对成熟,因此本文重点研究利用模糊层次分析法对雷达探测“蜂群”无人机进行作战效能评估的算法,并对其进行了实兵运用和现场验证[3]。
1 模糊层次分析法概述
所谓模糊层次分析法,就是先把复杂问题分解成各组成因素;然后再确定各因素之间的因果关系,对决策问题的各种要素建立错层次递阶结构模型;对同一层次的要素以上一级的要素为准则进行两两比较,并根据评定尺度用数值定量地确定其相对重要程度,据此建立模糊判断矩阵;然后通过一定计算,确定诸要素相对重要性总的排序;通过综合重要性的计算,对所有的方案进行优先排序,从而为决策者选择最优方案提供科学、定量的决策依据。它将复杂问题系统化、数学化和模型化,分析得出的结果更具说服力。
2 模糊层次分析法评估模型
模糊层次分析法首先要将所包含的要素分组,每一组作为一个层次,按照最高层、若干有关的中间层和最低层的形式排列起来,并通过向咨询专家、实践检验等方式,反复推敲、完善,最终得到满意的综合评估递阶层次结构。其确定程序如图1所示。
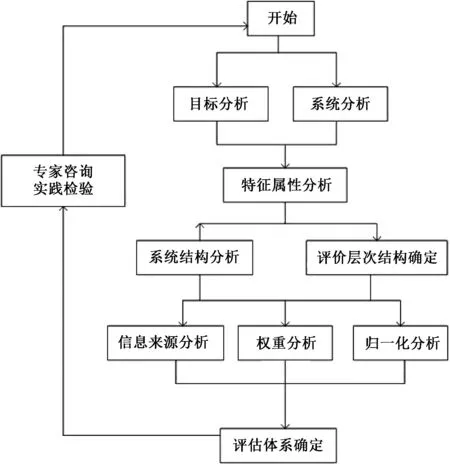
图1 评估体系确定过程简图
通过分析雷达工作原理,综合考虑影响其效能发挥的主要因素,根据上述评估体系建立过程,确定了发现能力、定位能力和跟踪能力3类评估准则。根据“蜂群”无人机的目标特性,发现能力分为最大发现距离、目标发现概率、目标识别概率。定位能力
分为距离定位能力、角度定位能力和速度定位能力。跟踪能力分为跟踪目标能力和跟踪目标数量,如图2所示。

图2 探测能力评估递阶层次结构
3 指标体系权重的确定
层次结构模型建立以后,依次确定准则层、中间层和最底层中各指标的权重。权重的确定方法很多,“蜂群”无人机目标的整体探测能力评估采用主观判断法中的层次分析法。
首先计算准则层B对目标层A的权重向量。具体步骤如下:
(1) 得出准则层B对目标层A的比较区间判断矩阵为:

(3) 计算该矩阵的模糊评价值、期望值:
同理,指标层C对准则层的比较区间判断矩阵分别为:
可求出指标层权重向量分别为:αB1=(0.489 3,0.288 8,0.222 0),αB2=(0.399 4,0.322 2,0.277 8),αB3=(0.600 1,0.399 9)。
各指标Ci最终权重为:α=(0.222 3,0.131 2,0.100 9,0.122 1,0.098 5,0.084 9,0.144 0,0.096 0)。
4 子评估指标及其计算方法
4.1 最大发现距离
雷达作用距离的大小取决于雷达本身的性能,其中有发射机、接收机、天线等的参数,同时又和“蜂群”无人机目标的性质、数量和环境因素有关,最大发现距离为:
(1)
式中:Pt为雷达发射功率;Gt为雷达发射天线增益;nσ为n架无人机有效截面积;Pamin为最小可检测信号功率。
4.2 目标发现概率
对“蜂群”无人机目标进行搜索时,首先划定搜索区域,然后通过扫描使侦察装置的视场覆盖搜索范围,与目标发生接触,以探测到目标,发现概率为:
(2)
式中:n为一次扫描中的脉冲积累数;y0为虚警概率为10-6时的检测门限;SN为雷达单个脉冲接收时线性系统输出的平均功率信噪比。
4.3 目标识别概率
雷达在搜索发现、探测到目标后,要判断目标属性是否是“蜂群”无人机,可采用目标的尺寸、反射面的性质、运动规律等作为目标特征,综合分析进行评定,识别概率为:
(3)
式中:μ1、μ2为第一、二目标特征值的数学期望;m为特征的数目;n为每个特征测量次数;σ为给定的特征的均方差。
4.4 距离定位能力
距离定位能力是指雷达对“蜂群”无人机目标的测距能力,可通过测时误差求出测距误差来衡量,误差越小,测距能力越强。测距误差为:
(4)
式中:B为带宽;E/N0为功率信噪比。
4.5 速度定位能力
速度定位能力是指雷达对“蜂群”无人机目标的测速能力,可通过测频误差求出测速误差来衡量,误差越小,测距能力越强。测速误差为:
(5)
式中:E/N0为功率信噪比。
4.6 角度定位能力
角度定位能力是指雷达对“蜂群”无人机目标的角度测量能力,利用最大信号测角法和方向图求出测角误差,误差越小,测角能力越强。测角误差为:
(6)
式中:E/N0为功率信噪比。
4.7 跟踪目标能力
根据雷达发现移动目标点时间窗口的信息,建立目标模拟航迹,该航迹与真实目标航迹的拟合量化程度能反映出跟踪目标的能力:
(7)
式中:(t,t+Δt)表示探测移动目标过程中,第i个时间窗口跟踪目标的起止时间;xt,yt表示t时刻模拟航迹坐标;Xt,Yt表示t时刻真实航迹坐标。
4.8 跟踪目标数量
通过多次实验验证,取多次雷达成功跟踪目标数量的平均值,可得跟踪目标数量能力:
(8)
式中:ai为第i次试验中成功跟踪“蜂群”无人机的数量。
5 应用实例分析
为了验证算法的可行性和有效性,进行了实地验证。
采用两型雷达探测由6架大疆“精灵-4A”无人机组成的无人机群,其规划飞行路线如图3所示,部分实验截图如图4和图5所示。
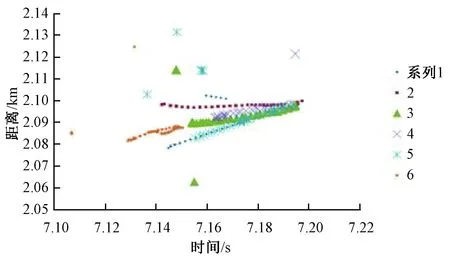
图3 大疆精灵-4A无人机规划飞行路线图

图4 雷达1探测、发现并跟踪5架大疆无人机画面截图

图5 雷达2探测、发现并跟踪3架大疆无人机画面截图
根据各评估指标的算法,得出如表1所示的子评估指标值。
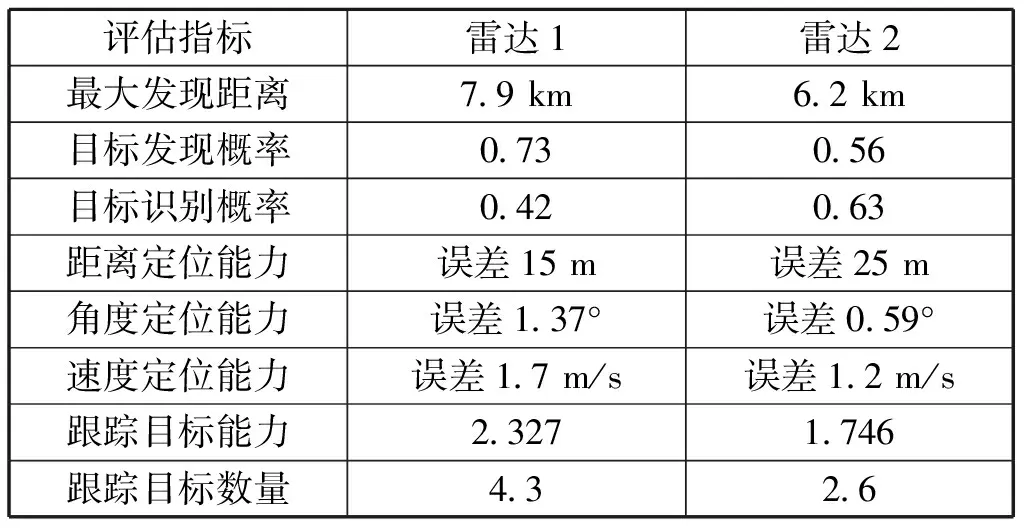
表1 子评估指标值
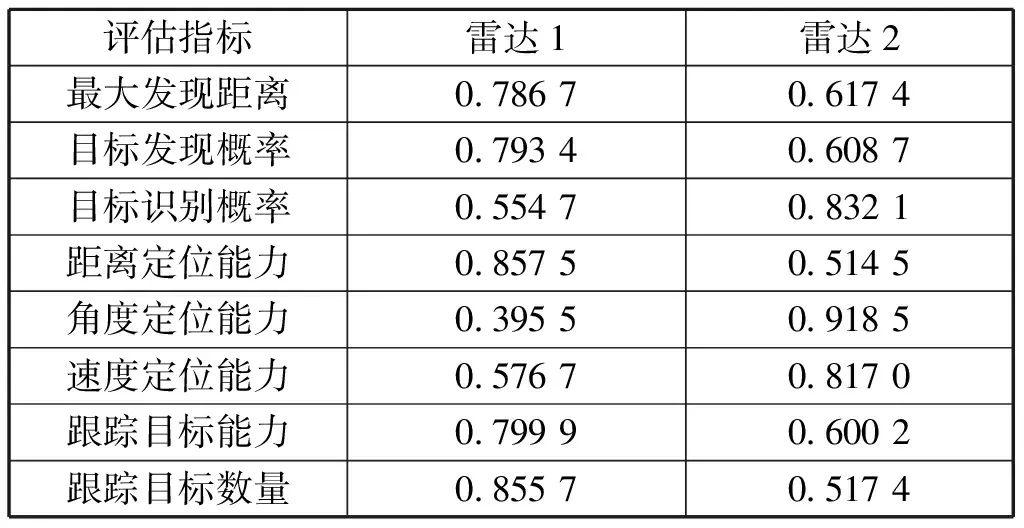
表2 规范化处理结果
再根据C准则层关于目标层A的最终权重α,可得出雷达1的探测性能值为0.724 9,雷达2的探测性能值为0.659 8,由此看出雷达1的探测能力高于雷达2。
6 结束语
文章首次研究、验证了模糊层次分析法应用到雷达探测“蜂群”无人机作战效能评估中的可行性,结合雷达性能和目标特性,从发现能力、定位能力和跟踪能力三方面,对雷达探测“蜂群”无人机的能力进行量化分析,客观、准确地区分了不同雷达对此类目标的探测能力。
“蜂群”无人机作为一种可能改变未来战争形态的作战力量,各国都高度重视,定量评估各种探测手段尤为关键,本文提到的算法对无线电或光电探测“蜂群”无人机同样具有借鉴价值。今后需进一步改进算法,研究定量评估其他单一手段或不同手段探测“蜂群”无人机的可行性,从而使探测效能评估算法更具重要的现实意义。