血管介入手术力反馈导管设计与验证
2019-03-18夏田欧芳亮孙姝彤
夏田,欧芳亮,孙姝彤
陕西科技大学机电工程学院 (陕西西安 710021)
根据世界卫生组织的报道,中国因心脑血管疾病死亡的人数每年高达300万。由于心血管疾病患者日益增多,心血管介入手术得到了广泛的临床应用。经皮冠状动脉介入是心内科最常见的心血管介入治疗方法。目前涉及人工干预、人工操作等程序,弊端较多,主要包括:患者和临床医师长时间受X线辐射;精确控制导管近端较为困难[1]。将机器人技术应用到医学领域产生的辅助导管导航系统,相比较于传统的手动送导管有很大优势。该导管导航系统可以提高系统稳定性和舒适型,消除医师的生理性颤抖,且减少了医师受到的辐射[2-3]。不足之处,许多机器人导航系统都没有力反馈系统。
目前,市场上商业化的导管遥控系统实现了更精确的导管控制,同时减小临床医师和患者暴露于X线的程度。Sensei实现了一个高自由度(DOF)机器人铰接导管鞘,远程导管操纵系统提供主/从控制平台,常规导管被简单地装载和控制到该主/从控制平台上[4]。然而,在Sensei系统中,机器人导管鞘比普通导管更坚硬,可能导致血管组织穿孔或损伤。
综上,为了实现手术过程中的力感知,使医师更好地在手术中操作导管,我们设计了能检测手术中导管与血管壁接触力的力反馈导管。
1 血管介入机器人控制系统设计
1.1 控制系统平台搭建
本系统采用PC机和电机控制器实现人机交互功能、电机控制和相关数据处理、显示与保存。本项目选用的是以色列的ELMO公司的产品,用于电机控制的产品:驱动器和控制器,控制器的型号是Gold Maestro,驱动器的型号G-Solo Whistle。
控制器的连接口有:EtnerCAT、CAN和USB。EtherCAT(以太网控制自动化技术)是一个开放架构,以以太网为基础的现场总线系统,其特点应用广泛、通信效率高,所以控制器和PC数据传输选用EtnerCAT。本系统需要实现三个动作:推送、加紧和旋转。这三个动作的执行元件都选用瑞士Maxon公司生产的电机,本实验采用带有霍尔传感器和MR光电编码的电机,电机型号分别是RE-25、EC-16、EC-max-16。电机本身的输出转速过高,选择行星轮减速器。上位机PC采用的是DELL的Optiplex 7040主机。硬件平台如图1所示。
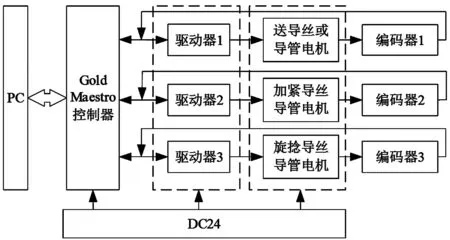
图1 硬件平台
1.2 系统软件设计
本系统软件要实现数据采集、发送、读取和保存,还要实现实时监控。我们采用C++编程语言在Visual Studio 2013(VS2013)中编写控制程序,使用其中的MFC模块中编写监控界面软件,实现对电机参数的设置,而且电机运动过中能监控电机的运动速度和移动距离。主程序流程图,如图2所示。
1.3 力反馈导管设计
文献[5]采用了两个应变片来测量导管与血管壁的接触力,这个设计不能完全测量导管头部与血管的接触力,只能测量某一位置的接触力。为了准确测量导管头部和血管壁的接触力,我们设计了力反馈导管,如图3所示,通过测量导管头部的变形量来测量这个接触力。为了测量这一小段变形,我们选择应变片测量导管的变形,通过测量应变片的变形量获得导管的变形,从而计算导管与血管壁接触力的大小,并把数据绘制图形,预测接触力的变化趋势,给医师精准操作导丝/导管提供理论依据。

图2 主程序流程图
为了应变片能准确测量导管的变形,我们采用两组应变片,每组应变片两个,两个应变片采用半桥的接线方法。通过测量应变片的电阻变化,测量导管的变形量。我们选用的测量仪器是一洋应变测试仪,型号是YSV8310。
四个应变片的黏贴位置是导管周围的四个方向,如图4所示,应变片的四个方位的位置情况。图5所示,应变片的前后位置。当导管和血管壁的接触在如图4所示的a、b、c、d四个位置中的任意一个位置时,有两组应变片工作,除这四个位置的任何位置两组应变片都参与工作,这样任何位置都能准确测量导管的应变。
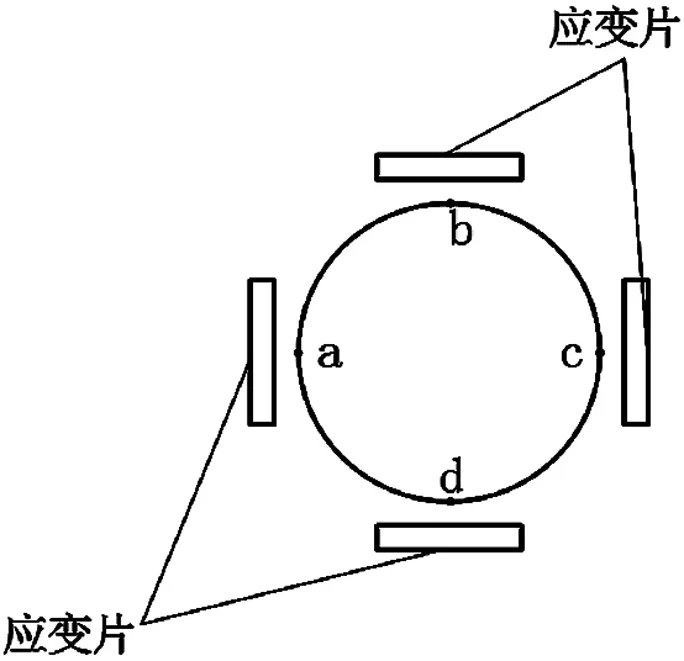
图4 导管的主视图示意图
2 力反馈导管的验证
为了验证力反馈导管的性能,我们设计了如图6所示的实验平台。实验平台由DELL的Optiplex 7040主机、联想的显示器、血管介入机器人、力反馈导管和静态应变仪测试装置组成。这个平台可操作机器人以恒定速度运行,并检测速度和导管头部的力变化,并保存数据。
为了能更准确地反映导管与血管壁接触时产生的接触力大小,实验采用人体血管仿真模型。获得人体血管数据,制作了人体血管模型。为了制作容易,将血管按比例缩放,制作的血管体模如图7所示。体模有三个与外界相通的接口。
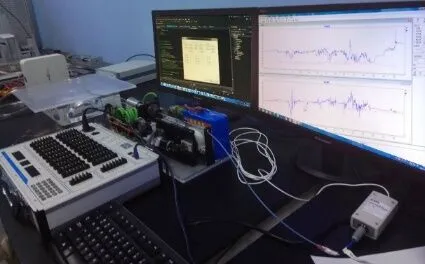
图6 实验平台
本实验设计为二组。一组实验,为了排除外界环境对检测的影响,在空气中推力反馈导管。结果表明,数据基本稳定,说明受环境的影响不大。图8所示是空气中推进实验所得数据中的一组数据绘制的曲线。另外一组实验,从体模的一个血管路径推进力反馈导管。实验以恒定速度向前推进,使得导管通过血管拐弯的地方,程序将获得的力信号检测并保存。将实验数据进行处理并绘制其图像。结果表明,力反馈导管在血管任何弯曲的地方都能检测到力的变化,并且能准确反映大小。图9所示是体膜推进实验所得数据的中一组数据绘制的曲线。
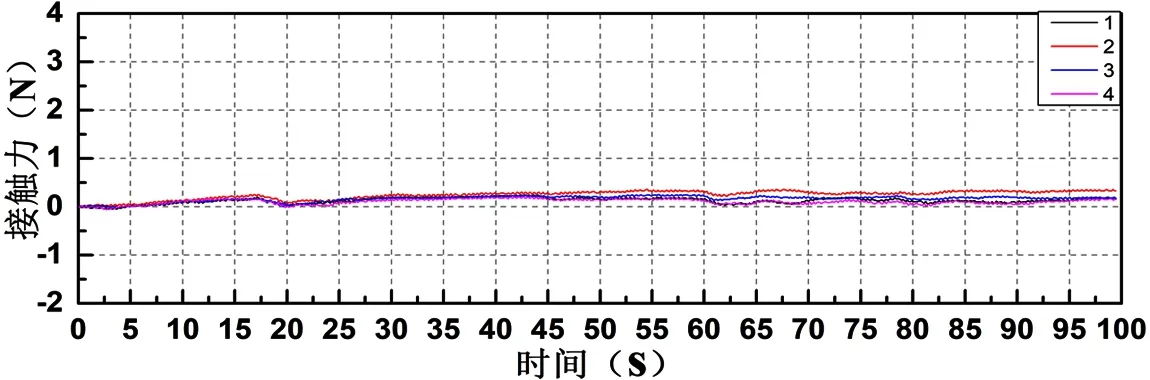
1、2是靠近头部位置的传感器,3、4是远离头部位置的传感器

1、2是靠近头部位置的传感器,3、4是远离头部位置的传感器
3 结论
在机构的基础上,完成了血管介入机器人控制系统的软硬件设计,实验结果表明,我们设计的力反馈导管可以很好地反馈导管和血管壁接触时接触力的大小,为血管介入机器人的准确操控提供了有利的帮助和预警;同时,力反馈导管和监控系统也为医师提供了更加准确的操控。该设计为遥操作血管介入手术提供了力反馈的基础,使得医师远程操作介入手术时具有临场感,提高了远程手术操作的成功率。
