三维激光扫描技术在文物保护中的应用研究与进展
2019-03-15侯聪毅
袁 楠,高 伟,侯聪毅
(天津城建大学 地质与测绘学院,天津 300384)
我国是一个拥有几千年传承文明的国家,留存至今的文物数不胜数.文物的分类方法有很多,例如按照存在形态,年代,区域,功用等类别.基于第一种分类法,文物通常分为不可移动和可移动两类.诸如古建筑、石窟寺、石刻、壁画等不可移动文物经常会受到自然天气和环境的影响以及人为的干预,面临着破损和毁灭;而像艺术品、文献、图书资料等可移动文物虽然可以密闭保存,但是人们又希望可以将其展出.因此,如何测量文物,对文物信息进行有效、快速、全面地提取、记录,甚至做到模型的复原和修复,是人们越来越关心的问题.传统的测量方法是借助直尺、角尺等工具对文物直接进行接触式测量,通过图纸和文字来记录其形状和尺寸大小,这种方法显然过于笨拙和简陋,不能给人直观的感觉.之后采用的方法是近景摄影测量,包括摄影、影像处理和制图三个步骤,以光学像片和纸质两种形式共同记录文物信息[1].它可以较为精确地显示文物表面纹理,但是测量和图像处理过程繁琐,获取的数据无法用于模型重建.
三维激光扫描技术(terrestrial laser scanning,简称TLS)作为近年来文物保护领域兴起的重要技术手段,以其高精度采样率、非接触性、快速高效的特点,可以准确有效地记录文物的真实信息,并能在虚拟现实领域用交互的手段来展示,因此在文物数字化保护方面的作用愈发重要.
1 三维激光扫描简介
三维激光扫描系统的基本原理是激光测距,是一种动态测量系统,既包括激光扫描仪,内部装有GNSS/IMU组合测量装置和相机等数据采集传感器[2],还包括装有专门的数据处理软件的计算机,以及支架、靶标等配套设备.基本原理如下:扫描仪首先朝扫描对象所在方向发射激光脉冲,到达其表面后会产生漫反射,而按原路径返回的激光会被扫描仪探测接收,由此可得两者的时间差,进而借助光速求得扫描仪到物体的距离.扫描仪上的测角系统则利用三角高程原理,借助其自带的测量坐标系,求解出扫描对象的三维坐标和激光反射强度.借助专门的软件将扫描得到的被测物体或者地形表面的点云进行处理,即可初步建立其三维几何模型,再通过后期的色彩和纹理贴图,最终生成完整的数字真三维模型.
三维激光扫描仪按照搭载方式和扫描空间的不同可以分为星载、机载、车载、固定和手持等几种.而按照测距原理可分为脉冲式、相位差式和光学三角测量三种基本类型.脉冲式激光扫描出现较早,采用了脉冲飞行时间差测距技术,通常适宜测量几百甚至几千米远的物体,因此精度较低,只有厘米级;相位差式扫描仪利用了相位测量的方法,可以扫描几十米的距离,精度为毫米级;而光学三角测量较为先进,利用三角几何关系计算物体位置,一般只适合扫描几米远的近处物体,但精度达到亚毫米级,因此常应用于工业测量和逆向工程.
三维激光扫描的整个逆向工程可分为三个基本步骤:数据采集、数据预处理、三维建模及行业应用.文物数字化的详细技术流程如图1所示.
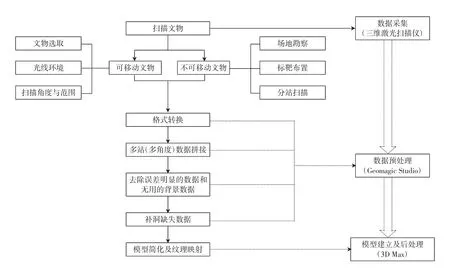
图1 三维激光扫描流程路线
2 三维激光扫描在文物保护领域的应用现状
三维激光扫描技术是以20世纪60年代发明的激光技术为基础,随着激光技术发展不断成熟,进而拓展应用到建筑、医学、采矿、刑侦及影视娱乐等更广阔的领域[3].瑞士Leica,法国MENSI,美国FARO等国外许多家公司不断对三维激光扫描系统进行研发,已形成颇具规模的产业.
三维激光扫描技术兴起于国外,因此在发达国家研究更为深入,在文物保护领域的应用更多.国外知名项目有2003年的美国数字化米开朗基罗项目,由斯坦福和华盛顿大学选取了10座著名雕塑作为研究对象,其中对大卫雕像模型进行扫描后得到了两亿个面片和7 000幅照片[4].在结合高分辨率照片进行三维建模的过程中,研究人员分析了雕像的外部轮廓线,达到了文物数字化的目的.2004年,德国汉堡大学用两台地面三维激光扫描仪分别对汉堡市政大厅内的Kaisersaal和Großer Saal两座大厅内外进行全面扫描,获取二维平面布局和三维模型[5].2015年,学者用三维激光技术对伯利兹的Las Cuevas遗址进行建模,研究其相移变化[6].2015年,莫斯科专家对Shukhov Tower塔身建立三维几何模型,并分析其内部结构[7].2016年,相关人员通过该技术对瑞士高山地区的石板画石柱进行刻痕的侵蚀分析研究[8].
近年来,国内的许多文物保护单位和团体在起动文物数字化项目时,也纷纷采用三维激光扫描技术,并逐步发展成熟.最具代表性的当属北京故宫博物院与日本凸版印刷株式会社合作的故宫数字建模项目中,运用三维图形技术和虚拟现实技术建立起故宫建筑群的三维数据库[9].另外,秦始皇兵马俑博物馆从2007年开始使用该技术获取了二号俑坑的三维模型,为大型文物遗址的三维技术运用和数字化存储提供了较为可行的借鉴方案[10].首都博物馆也成立了文物保护分析实验室,在新馆建设之初对馆藏四十余件珍贵文物进行三维激光扫描,用于动态虚拟展示[11].2010年,国家指南针计划项目“北京先农坛太岁殿古建筑精细测绘”同时采用了三维激光扫描和传统手工测绘技术,对太岁殿整体木结构、各部分构件和彩画装饰等进行精细测绘和三维建模,为我国古建筑的数字保护提供参考价值[12].
3 用于文物测绘的核心技术研究现状
文物数字化过程的关键技术和环节概括起来主要有:点云配准(即数据拼接),去噪,补洞,简化压缩,分割,三维建模等.本文分析了点云去噪,简化压缩和三维建模三方面的研究现状.
3.1 点云去噪(滤波)
激光点云数据按照点云的空间位置分布,可以分为四类:扫描线点云、阵列式点云、三角化点云和散乱点云[13].对文物采集获得的三维激光扫描数据为散乱点云,通常扫描之后的原始数据存在大量噪点.如果不对其进行有效剔除,将会影响后续体征点的提取和模型曲面的光滑度.噪点产生的主要原因有以下三个[14].
(1)扫描文物本身.例如材质、外表纹理、颜色、反光度和平滑度等.
(2)扫描系统自身.包括扫描仪运行工作过程中产生的微小振动,相机镜头分辨率和扫描精度等.
(3)介质干扰产生的偶然误差.主要指遮挡,触碰,抖动等外界环境的干扰.
对于小型可移动文物而言,按照噪点的分布情况可以分成两类:一类是明显离群点,偏离文物轮廓的点集较远,振幅较大,手动即可剔除;一类是混杂在点集当中,振幅较小,需要运用专门算法才可去除[15].而对于古建筑,大型遗址等不可移动的文物点云数据,其数据量远高于前者,因此需要考虑的有目标文物轮廓外距离较远的点云滤除、扫描过程中对文物有遮挡的障碍物形成的孤立点集及线性噪声滤除.
针对文物扫描过程中的散乱点云滤波,一般先要手动框选直接滤除外围明显的离群噪点,然后再对密集点云进行网格化后运用算法滤波.后者常用的传统算法有:双边滤波法,拉普拉斯算法,平均曲率流算法,邻域平均滤波法[16].
(1)拉普拉斯算法(Laplace).拉普拉斯算子(Laplace Operator)f是n维欧几里德空间中的一个二阶微分算子,定义为梯度(Δf)的散度.在三维空间下的公式为

式中:x,y,z代表点在三维空间中的笛卡尔坐标.
处理方法是将点集中异常的高频噪声点进行多次迭代,使其扩散到邻域点的重心位置,达到光滑去噪的目的.该算法优势是计算简单,但是迭代次数增加会导致点云的网格体积快速收缩,最终生成的模型纹理趋于模糊化[17].
(2)双边滤波算法.基于点云数据的双边滤波算法是由图像处理学中的双边滤波演化而来,核心依然是高斯函数,是一种基于空间分布的非线性滤波函数.Thouis R.Jones[18]和I.Drori[19]研究总结出了基于网格模型的双边滤波去噪算子.该算法的优势是去噪后能较好保持模型特征,但是算子比较依赖局部邻域特征,面对干扰严重的噪点时去除效果并不理想,不是无法去除就是需要多次迭代,多次迭代的后果依然是光滑模糊,丢失纹理.
(3)平均曲率流算法.该法由Desbrun提出,方法是先估算出曲率,再以平均曲率的速度让网格顶点沿法向方向移动,它解决了拉普拉斯算法中顶点偏移的问题,但是模型会生成大量的不规则三角面片,破坏了网格的采样率[20-21].
(4)邻域平均滤波法.散乱点云的邻域平均滤波算法仍然来源于图像处理学,属于线性平滑滤波.方法是定义一个模板窗口,借助窗口对点集进行扫描,对该点邻域内的所有点求均值,再过滤掉差值较大的高频噪点[22].模板窗口越大,去噪的效果越显著.其优势是计算简单,处理时间快,但是和拉普拉斯算法一样容易导致尖锐纹理缺失,并且窗口的选取较为困难.
由于这些传统方法运用到文物数字建模时或多或少存在一些问题和不足,在其核心算法的基础上,许多学者做出适应文物散乱点云特征的去噪改进方法.李玉勤等人在传统拉普拉斯算法的基础上,提出了一种将点云权重模糊C聚类和Laplace算法结合的去噪方法,在处理文物的点云精度和速度上优势明显[23].张育锋在对石狮子进行扫描研究过程中,提出了一种改进的双边滤波算法,分别对特征和非特征点云运用不同的点云平均欧式距离来计算双边滤波因子,实现去噪和保留特征点的效果[24].马晓泉在研究小型器物时提出了一种基于最小二乘法的分步去噪方法,具体步骤是先利用求取包围盒最大连通域的方法去除离群点,再用最小二乘法拟合出K邻域内点的最佳逼近平面,通过判定邻域各点到该平面的距离与设定的阈值大小来去除第二类噪点[25].艾卫涛提出了一种基于重心的点云数据去噪算法,利用Matlab编程在包围盒的点云数据压缩算法上加以改进[26].王方建研究古建筑点云去噪时提出了空间栅格去噪法,具体方法是首先对原始数据进行八叉树划分,再对八叉树叶节点上点云数据进行空间栅格化,通过计算非空栅格间的相邻拓扑关系,滤除孤立点集和线性点集,从而达到去噪效果[27].刘大峰等人提出的鲁棒滤波算法采用核密度估计进行聚类分析,利用Mean-Shift迭代方式将每一个采样点“漂移”到核密度估计函数的局部最大值点,使点云曲面收敛为稳定的三维模型[28-29].
相比于上述几种传统的去噪方式,小波变换去噪以其独特的优势,近年来被广泛应用到三维激光点云去噪研究当中.小波变换由傅里叶变换发展演化而来,但其窗口却能够随着频率变化而做出自适应调整.概括起来,小波变换主要具有如下优点:低熵性,多分辨率性,去相关性以及小波基选取多样性[30].这些优点决定了小波变换可以对噪声采用不同分辨率进行局部范围的滤除,这就在去噪的同时能较好地保留边缘的纹理特征.
由于小波变化只能是对信号进行时空的频率分析,而三维激光点云数据并无时间和频域特征,因此不能将其视为信号,而要先对其进行拓扑化.具体的变换过程就是,在对点云数据做网格化处理之后,用指定的小波做多分辨率分析,就会分解成不同频域的信息,利用Matlab等软件去除高频噪声,对低频的数据进行重构,重新得到点云[31].靳洁利用了B样条小波分解程序在VC++平台上对点云进行分解,具体过程是首先将一阶高频数据剔除,然后借助Mallat小波处理中低频信息,多次迭代之后的结果和利用GeomagicStudio软件自动滤波的结果对比分析发现去噪效果明显,去噪效果的好坏由重构曲面的差异侧面来进行判断[27].
3.2 点云简化和压缩
针对不可移动文物尤其是大型古建筑群而言,仅一站的扫描点云就可以达到千万个,用电脑存储的文件大小常常在百MB至GB量级.很多时候,并非所有的点数据都对后期建模有作用,由于大量的点云都呈集中分布,导致密度大、冗余信息多,因此建模过程中数据组织与管理困难,处理时间大大加长.因此,如何在保证建模精度和纹理特征的前提下减少需要处理的数据量,从而减小信息存储大小和处理时间,就需要对三维激光点云数据进行简化压缩.目前常用的方法有:基于曲率的简化算法,包围盒算法,基于平均点距的简化算法,坐标增量法,区域重心法,基于网格的简化算法[32].
马晓泉提出了一种基于点云轮廓点的提取方法,对第一种简化算法做出了针对性改进[33].但简化效果与轮廓点提取中的K邻域和大小的选取有关,需要不断试验参数值.蔺小虎在传统坐标增量法的基础上,将一维的扫描线逐点压缩扩展到二维的扫描线之间的点云压缩,提出了改进坐标增量的点云数据压缩算法,并借助软件将该算法与上述一些算法的压缩效果进行了比较[34].于海霞通过对长方体区域的压缩方法研究,得出在点云数据比较密集时可以采用区域重心压缩法,在点数数据生成三维TIN的时候可以采用共顶点压缩法的结论[35].
近年来,关于海量三维激光扫描点云数据的压缩方法又有了新的进展,研究较多的就是基于多分辨率的八叉树和k-d树(K-dimensionaltree).比如JanElseberg等人提出了通过构建八叉树来处理数据量达十亿级的三维激光点云,实现了有效存储和压缩的目的[36].王永志等人利用八叉树在三维空间上的快速收敛性和三维R~*树对散乱点云的稳定性,提出了一种“3DOR~*树”的空间混合索引结构.方法是:先对三维点云进行八叉树划分;然后对八叉树叶子节点构建三维R~*树,进而实现“3DOR~*树”索引结构的构建;最后对激光点云数据进行特征分析,构建相应的数据存储结构,实现点云压缩和存储[37].
3.3 建模方法研究
传统的文物建模和修复手段耗时长,精度低,最主要是测量工具对文物要有接触,从而不可避免地对文物造成损坏.
现有常用的建模软件有Geomagic Studio、Cyclone、Imageware、CopyCAD等.它们都是对已有或者已存在过的实物和产品进行逆向分析和研究,属于一种再现过程,因此称为逆向工程软件,在文物保护数字化领域起着重要作用.其建模过程基本类似,首先自动将点云数据转换成多边形,然后优化精简多边形数目,进而转换成NURBS曲面,最后以匹配CAD、CAM等软件的文件格式(如IGS、STL、DXF等)来导出[38].
多数古建筑和大型遗址等不可移动文物在建模阶段可以分为三个步骤:首先用CAD等软件对点云切片进行线描,提取出轮廓线和特征点,从而得到各部分构件的相对位置和尺寸大小;然后创建各部分构件的三维模型;最后对各部分构件进行组装.
实际情况下,由于文物的造型、结构各不相同,在建模过程中尤其是分离构件时,方法也不尽相同.索俊锋在对蝴蝶厅进行三维建模时,提出了一种把三维激光扫描技术和现代测量技术相结合的室内外一体化三维建模方法,借助哲学领域上的本体思维将古建筑的各部分构件分成台基、屋身、屋顶三部分并单独建模[39].化蕾等人以福建永定客家土楼为研究对象,将客家土楼的外部和内部点云数据分开,分别对外部和内部进行轮廓线提取,再独立建模[40].陆益红等人对狮子山楚王陵墓进行三维建模时,分段生成曲面的TIN模型,然后分割出钢结构点云并分别建模,模拟出每一根钢管的尺寸和坐标[41].王金利用三维扫描技术对遗址墓葬出土的各类陶器进行建模,通过C++编程提取特征曲线,并运用特征尺寸比值聚类和特征曲线椭圆傅里叶[42]分析的数学方法进行了聚类分析研究[43].刘钰对重庆大足石刻千手观音的建立模型过程研究了多分辨率模型的融合[44].
建模过程中的核心问题是自由曲面重构技术.常用的曲面重建方法有参数曲面重建、隐式曲面重建、分片线性曲面重建、细分曲面重建与变形曲面重建.传统的文物建模方式以构建三角网为主,缺点就是计算量大而且繁琐.不少学者在研究不同类型文物的建模时做出了改进.杨艳以司母戊鼎为例,对鼎类型的文物提出了新的建模方法.首先基于四点原则,将扫描得到的文物点云数据块进行手动分割,利用每一块的几何特征来建立统一的参考坐标系,进而生成深度图像模型,最后经过纹理映射,合并成一个完整的彩色精细模型[45].周亚男提出一种基于曲线的曲面重构方法,以瓷质瓶和秦俑为例研究分析了异形和规则两种曲面重构的两种方法,并对拟合成的NURBS曲面进行精度对比分析[46].蔺小虎针对大雁塔和卢沟桥上石狮子的曲面建模,主要研究了区域生长法、B样条曲面拟合算法、反向传输神经网络法等典型的曲面拟合方法,并总结分析了现有曲面拟合方法中存在的局限性[34].区域增长法[47]和随机抽样一致法[48]是两种有效的面片分割算法,它们通过添加面片语义特征能够有效重建包括门窗等细部特征的建筑物模型.
4 结语
自从三维激光扫描技术运用到文物保护领域以来,不少学者针对其中的关键技术难点做出大量研究,并不断完善其流程和标准,基于文物保护的三维激光扫描系统正在逐步成熟,并开始发挥其独特的优势.其对以三维激光扫描技术为基础的文物数字化工作意义重大:对于石窟,大型古建筑等不可移动文物而言,三维建模之后可以生成各种等值线,以及含有矢量信息的文物信息图片;还可用于法式勘察,残损变形和结构构件的测绘[49].对于小型可移动文物来说,可以用于复制和数字修复.近些年兴起的针对文物建立的虚拟现实系统就是以三维激光扫描技术为基础.但是该技术就目前发展现状而言还存在一些局限性,例如仪器和软件成本过高,很多结构复杂的文物难以获取到准确全面的数据等.
对三维激光扫描系统而言,实现从数据采集到建模的全程自动化和高效化,同时不断提高三维模型的精度和仿真度是未来文物数字化发展的重要趋势.与此同时,扫描过程中各站数据的无缝拼接,系统误差和偶然误差的调整,外界光线等环境的影响,以及如何对模型进行精度评定,将成为今后该技术用于文物测绘中的主要研究课题.
