无人机声学脱靶量测量系统研究
2019-03-14
中国人民解放军92419部队,辽宁省 兴城市 125106
早期声学脱靶量测量系统采用匹配场法,需要经过多次测量获得目标的形状系数;同时声学传感器测量采用固定判决门限技术,使用中存在一定的局限性。本文通过提高采样速度,利用多个测量传感器,测量不同传感器接收到激波的时间差,解算出目标在测量坐标系的空间位置,进而得到脱靶量。这种方法测量设备结构简单、不需要测量目标的形状系数、测量精度高、适应性强,可用于超声速目标脱靶量测量。
早期声学脱靶量测量主要通过采用匹配场法,经过多次测量,获得目标的形状系数,进而利用经验公式获得激波发出点到声学传感器的距离,结合目标的速度计算目标的脱靶量。目标形状系数需要通过多次射击测试与数据拟合的方法获得。不同目标的形状参数不同,需要重新测试和数据拟合。另外,早期测量采用固定判决门限技术,当激波能量弱,背景噪声高时,对激波信号采集能量弱,同时也受当时的器件等限制,传感器阵列中经常有个别传感器处理不出来激波信号,因此在使用中存在一定的局限性。
随着信号采集技术的进步,高速采样能力满足对微秒级信号采样要求,采用多个测量传感器,测量不同传感器接收到激波的时间差,解算出超声速目标在测量坐标系的空间位置。这种方法的测量设备结构简单,不需要测量目标的形状系数,测量精度高,适应性强。
测量原理
当目标以超声速在大气中飞行时,在目标的头尾部形成激波。激波顶点在目标头部,波前呈一锥面,激波在垂直于波前方向以声速运动,锥面的半角μ=arcsin(1/Ma)。当激波扫过检测点时,其空气压力迅速从静态压力P0增到超压P0+P1,并随时间和空间衰减到P0-P2,最后恢复到P0。激波的幅值和两幅值间的宽度取决于目标的特性、弹速以及弹道到检测点的法线距离等。
脱靶距离是目标飞经靶标附近时距靶心的最短距离。在图1中,当目标由B点向C点运动时,目标在B点产生的激波沿波阵面的法线方向传播到A点。假设A点为脱靶量测量阵列坐标中心,则目标在B点产生的激波传播到A点的距离为dB,A点至弹道的距离R即为脱靶距离。
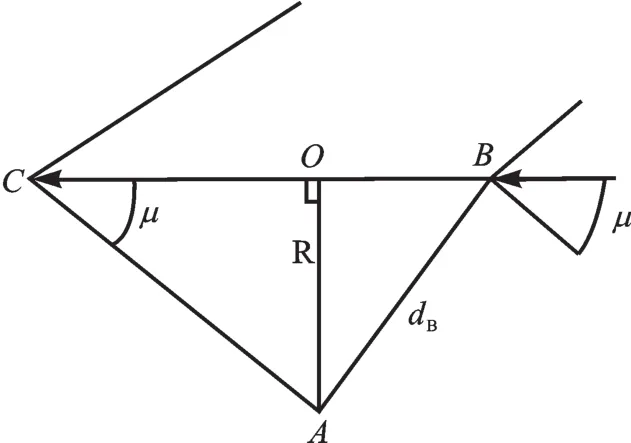
图1 脱靶距离示意图

因为sinμ=1/Ma,所以

其中,Ma为目标马赫数。
那么,激波发出点到过捷径点O的距离L0为:

目标的矢量脱靶量测量实际上是要测量弹靶遭遇段目标的运动轨迹。首先测量目标相对于脱靶量测量设备在测量坐标系下的运动轨迹,再根据坐标系转换关系,转换到靶标航迹坐标系下。
如果在测量坐标系下测量出各个时刻目标的瞬间位置坐标,就可以得到目标运动轨迹。在弹靶遭遇段相对时间很短的条件下,目标的运动规律可以近似为匀速直线运动,其运动轨迹的测量可以转化为测量坐标系下的直线运动的测量。应用四元阵列声学传感器,测量目标超声速飞行产生的激波信号,进而获得目标航迹的运动参数。
假设弹靶交会前其运动规律可近似为匀速直线运动。目标运动轨迹与声学阵列位置关系如图2所示。在图中定义的系统测量坐标系中,设目标过靶激波发出点的坐标为(x0,y0,z0),目标运动轨迹与OXY平面的夹角即弹道倾角为β,运动轨迹方向角即弹道偏角为α。显然,目标的直线运动轨迹可以由这五个参数唯一确定。加上目标运动速度V和目标激波发出点时刻的时间t0,目标在空间运动的整个时间历程就可以唯一确定。因此,矢量脱靶量测量可以通过设法测量{(x0,y0,z0),α,β,V,t0}七个参数来实现。
测量阵列设置
设置基阵S1~S4,其中心为脱靶量测量中心,以此定义脱靶量测量坐标系为:坐标原点O取为测量基阵S1~S4的几何中心,OY轴与声学传感器S3、S1连线重合,指向S1为正,OX与声学传感器S2、S4连线重合,指向S4方向为正。设置副测量基阵S'1~S'4,在基阵S1~S4的基础上沿着OY轴平移获得。

图2 声学脱靶量测量原理
激波发出点测量
通过测量目标飞行航路上不同点发出的激波达到基阵上传感器S1~S4、副基阵传感器S1'~S4'时间差,获得不同激波发出点的空间位置(x0,y0,z0)、(x1,y1,z1)。
目标运动速度
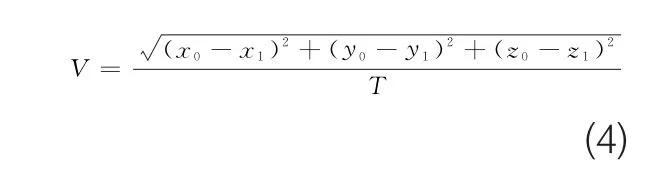
由于测量基阵和副基阵之间间距较小,可以认为目标是匀速直线运动飞过空间位置(x0,y0,z0)和(x1,y1,z1),时间间隔为T,飞行速度V为:
目标运动姿态角
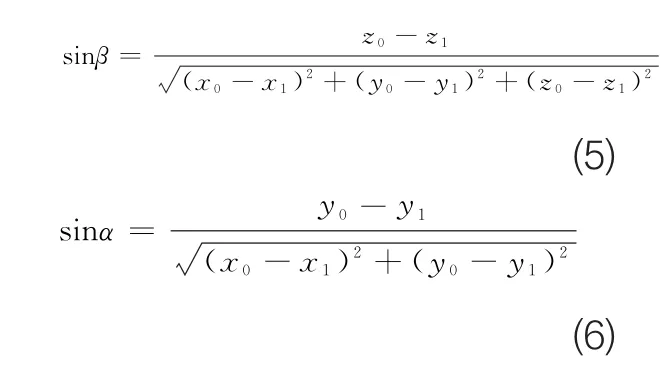
为获得目标在过测量基阵捷径点时的坐标,需要获得目标运动轨迹与OXY平面的夹角以及运动轨迹方向角。
目标过靶点的运动轨迹
设激波发出点的空间位置(x0,y0,z0),则目标继续飞行的任意时刻t的位置坐标为:
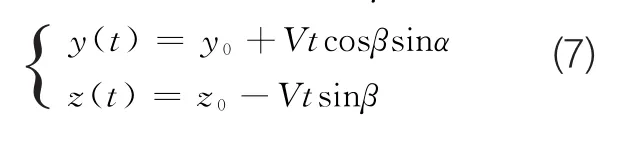
脱靶时刻位置为:
国内外发展现状和趋势
2000年以后,国内多所大学先后开展声学脱靶量测量研究,采用测量激波信号经过不同传感器时产生的时间差,并应用现代信号处理技术,进行脱靶量测量,经过仿真实验和实际应用,均取得满意效果。
美国主要用于测量坦克射击精度测量的脱靶量测量系统(ROUND DISCRIMIATION SYSTEM, RDS)等已经在陆军靶场得到广泛应用,其声学传感器阵列如图3所示。

图3 声学传感器阵列图
国外研制的声学脱靶量测量设备,不但可以测量导弹脱靶量,同时还可以测量炮弹脱靶量、步枪射击报靶等,应用越来越广泛。对激波信号的适应范围也越来越宽,信号处理水平也在不断提高,使脱靶量测量系统正朝着小型化、高精确性、低功耗和高可靠性的方向发展,随着信号处理、高动态声压传感器技术的不断发展,声学脱靶量技术也将结合这些前沿技术获得进一步的发展,成为一种有效的、好用的测量设备。图4为国外声学脱靶量测量系统。
瑞典空靶公司生产了多种型号的声学脱靶量测量系统,应用于超音速目标的脱靶量测量,如图5所示。其采用双阵结构,可以测量炮弹、导弹等超音速目标。测量范围小于50m,精度1m。当范围增加时,测量精度为10%脱靶距离。测量数据实时通过超短波系统传到地面,用于处理。该系统体积小,重量轻,
英国也有Ms410型,如图6 所示,安装在MsAT-500靶机上。其测量范围60m、测量精度1m。
仿真试验
假设声源坐标为(距靶心距离分别为R=50、30、15、5m,α=0.5236 rad,β=0.7854 rad)时;采用被动声脱靶量测量系统模型为四元十字阵模型,仿真过程中长度单位为m、角度单位为rad,构造的四路激波信号,信噪比为10,信号长度为2048,采样频率为100KHz,四路仿真信号如图7所示。
应用上面构造的四路仿真信号,然后结合信号与传声器阵列靶心的距离变化情况,应用设计的四元十字阵及其相关算法得到的仿真结果如表1所示。

表1 仿真结果

图4 国外声学脱靶量测量系统

图5 AS-131/12U/Ul/TB声学脱靶量系统

图6 Ms410型声学脱靶量系统安装结构和地面接收机
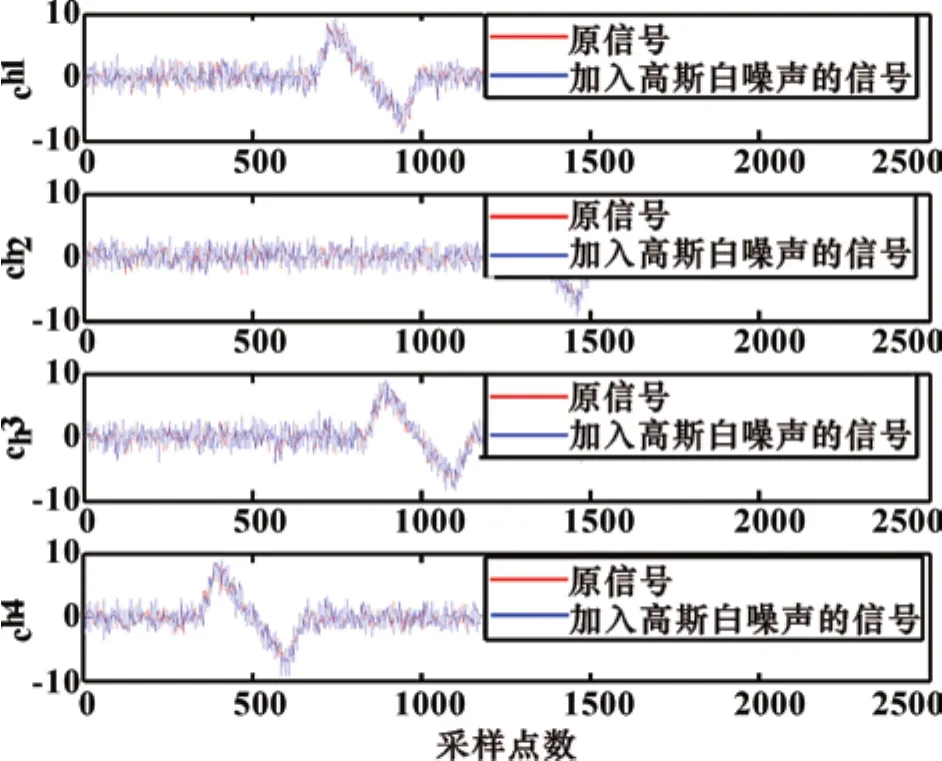
图7 四路仿真信号
根据表1可以看出,脱靶量在50m时最大为0.4351m,在15m时为-0.2628m,在5m时最小为-0.1426m。产生上述误差的原因主要是时延估计值和实际测量值存在一定的误差导致的(指的是采样点数之差不能是理想的整数)。在实际测量过程中由于声源与实际传声器之间的距离,以及声源到达各个传声器的时间差不可能是整数,导致计算结果出现误差。但是这些误差是在允许的范围之内的。
外场试验
外场试验中测量得到的波形如图8所示,测量结果如表2所示。
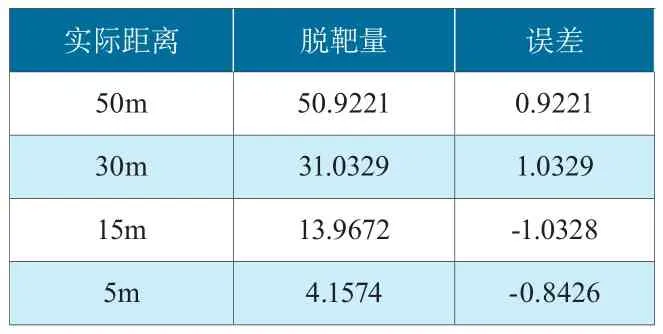
表2 四种距离下测量结果
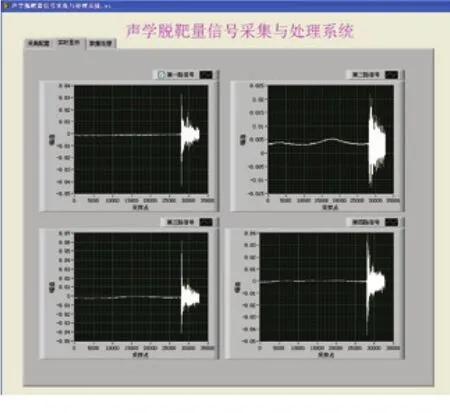
图8 实时显示测量波形
根据表2可以看出,脱靶量在30m时最大为1.0329m,在15m时为-1.0328m,在5m时最小为-0.8426m。从上表中可以看出测量结果存在一定误差。
结论
声学脱靶量测量系统采用声学传感器阵列,测量不同传感器接收到激波的时间差,解算出目标在测量坐标系的空间位置,进而得到脱靶量。这种方法的测量设备结构简单,不需要测量目标的形状系数,测量精度高,适应性强。
