电驱动机动平台发动机电动控制研究∗
2019-03-11苏建强王志和
苏建强,王志和
(内蒙古工业大学电力学院自动化系,呼和浩特 010051)
前言
相比传统的机械车辆,电动车辆驾驶员操纵装置与执行元件之间是一种柔性连接,操纵装置只是驾驶信号的输入接口。加速踏板行程信号不再是传统车辆的发动机油门位置,一般代表后功率链驱动电机的转速、转矩或功率,为保证后功率链的驱动电机功率稳定输出,须协调控制前功率链的各个能量源能量分配,且同时要保证各个能量源按照自身最优或次优工作模式运行[1-2]。
本文中以某电驱动机动平台为研究对象,平台前功率链采用了发动机-发电机系统和动力电池两种能量源供电模式,根据后功率的驱动电机功率需求和动力电池荷电状态SOC,通过控制发动机转速和发电机电压来控制动力电池充放电,进而实现能量控制与管理。而发动机的电动控制是能量管理的前提,为此设计了步进电机控制系统,通过步进电机调节发动机齿杆位置实现电驱动平台发动机的全自动控制。
发动机-发电机系统一般采用单点转速控制、多点转速控制和沿最佳燃油经济曲线功率跟踪控制等控制方法实现车辆的能量控制[3-5]。本文中的系统采用多点转速控制方式,根据驱动电机不同的功率需求,发动机工作在不同的转速点。在发动机转速闭环控制时,由于发动机是一个迟滞非线性系统,实验中采用经典的PID控制时,系统调速性能差,发动机转速难以稳定,文献[6]中采用了单神经元自适应PID控制调节参数,但实际应用中较难实现和推广。本文中提出基于模糊控制PI参数调节,利用模糊控制适用范围广、对时变负载有一定鲁棒性的特点[7-9],并结合PI控制具有较好精度和动态响应速度的优势,通过模糊控制输出变量来实时调整PI参数,以减小发动机非线性及扰动因素的影响,从而提高发动机转速控制性能。
1 电驱动平台发动机步进电机控制系统
电驱动平台总体结构和实物分别如图1和图2所示。能量源由发动机-发电机系统和动力锂电池组共同构成,两者输出共同为双侧驱动电机提供电能,同侧车轮通过链传动连接,8轮共同驱动平台行驶。发动机带动发电机发电,在功率需求较小时,还为动力电池充电,当发动机不能满足功率需求时,由动力电池放电补充。发动机控制单元由步进电机及其控制系统组成,通过步进电机控制发动机齿杆位置从而调节发动机油门开度,发动机与发电机之间装有电磁离合器。

图2 平台实物图
1.1 发动机电动控制系统
电驱动机动平台的发动机共有两种工作方式:一种是发动机转速开环控制,一种是发动机转速闭环控制。发动机和发电机之间通过离合器连接,发动机在怠速状态时与发电机离合器断开,此时油门开度信号直接代表发动机的齿杆位置,属于转速开环控制,发动机处于起动怠速阶段。发动机由怠速切换到转速闭环状态时,考虑到离合器闭合时发动机的负载突增会使发动机速度骤降甚至熄火,因此在检测到油门开度大于60%时,电磁离合器才会闭合,带动发电机发电。此时油门开度信号代表后功率电动机的转速、转矩或功率。电驱动平台发动机步进电机控制系统如图3所示,发动机的两种工作方式由综合控制单元通过CAN总线传输到发动机控制单元中。

图3 发动机步进电机控制系统
1.2 步进电机DSP控制系统
步进电机的输入为数字量,适合于直接使用数字电路进行控制[10],同时为实现平台上各个子系统控制单元的通用性,步进电机控制系统采用TI公司的DSP2808为主控芯片。图4为DSP2808控制系统的主要控制信号,系统通过CAN总线与其它子系统和平台综合控制单元通信。通过2808的一路I/O方向信号控制步进电机驱动器方向信号确定步进电机前进或后退,另一路I/O脉冲信号控制步进电机驱动器脉冲个数确定步进电机的步数,从而控制发动机的齿杆位置。通过霍尔传感器接到DSP的eCAP引脚检测发动机的转速。

图4 DSP2808控制框图
1.3 发动机转速模糊PI控制
电驱动平台发动机-发电机系统是一个不确定、非线性时变系统。在实际调试控制系统时,采用固定参数PID控制时,系统难以稳定,因此用模糊控制器输出a(n)和b(n)来修改PI控制器参数,图5为设计的模糊PI控制器。
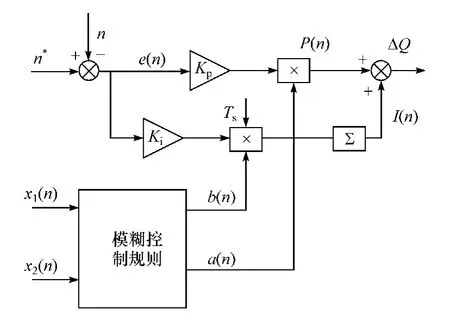
图5 模糊PI控制器

表1 模糊控制规则

式中:Ts为系统采样时间;Kp为PI比例系数;Ki为PI积分系数;n∗为给定发动机转速;n为发动机反馈转速。
模糊控制器输入变量分别取发动机转速误差、误差的微分,即

各输入变量x1,x2和输出变量a,b的模糊子集分布如图6和图7所示。
由图5可得

图6 输入变量模糊子集分布

图7 输出变量模糊子集分布
输入变量x1和x2划分为“负大”、“负小”、“零”、“正小”、“正大”5 个模糊子集,即(NB,NS,ZE,PS,PB);输出变量a和b划分为“低”、“中”、“高”3个模糊子集(L代表low,M代表medium,H代表high)。当误差|e|较大时,发动机实际转速与给定转速误差较大,为能加快系统的响应速度,增大比例控制;当误差|e|较小时,适当减小比例控制,通过增大积分控制消除误差,在后功率链动力需求时,增强发动机的抗干扰能力。而如果误差e为正且误差变化率e·为正时,误差有增大趋势;误差e为正且误差变化率e·为负时,误差有减小趋势。根据以上原则,制定模糊规则,如表1所示。
解模糊化采用广泛使用的加权平均法中的质心法,根据以上规则的推理可得到模糊控制器输出a和b查询表,很容易在DSP中实现。
2 实验验证
对设计的发动机齿杆步进电机控制系统进行了测试实验。实验中步进电机DSP2808控制器通过CAN总线实时向上位机传输测试数据,上位机的数据记录频率f=64/s。
2.1 发动机转速开环控制测试实验
在给定固定油门开度时,测试步进电机脉冲和发动机转速。油门开度由上位机通过CAN总线给定,此时步进电机处于开环控制。
图8为步进电机在不同油门开度时由示波器得到的驱动波形。由图可知,当给定油门开度增大时,控制系统对步进电机的低电平驱动脉冲个数增加,步进电机拉动发动机齿杆位移增大。

图8 步进电机实验驱动波形
图9和图10分别为给定不同油门开度时步进电机脉冲个数计数值和发动机空载转速响应曲线。发动机的初始油门开度为30%,t=0.125s时上位机通过CAN总线给定90%。经过0.526 5s后油门开度由30%达到给定90%,步进电机系统响应时间较快,发动机在t=1.75s时转速稳定到n=3200r/min(误差小于2%),发动机在t=3.5s之后转速平稳。
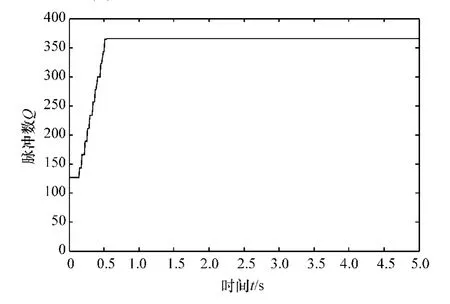
图9 油门开度为30%~90%步进电机脉冲个数

图10 油门开度为30%~90%发动机的转速响应
2.2 发动机转速闭环控制实验
发动机转速闭环控制时,发动机由怠速状态(发动机与发电机连接的离合器分离)起动到恒定转速n=2450r/min,步进电机脉冲个数响应见图11,发动机转速响应曲线见图12。t=8.2s时,发动机-发电机离合信号给定为高,发动机与发电机连接的电磁离合器吸合,发动机带动发电机发电,由于发电机剩磁的存在,发电机电压迅速建立,如图13所示,电压平稳,超调很小,不会对动力锂电池造成冲击。发动机由于负载转矩和转动惯量的变化,转速下降,步进电机脉冲增加,t=11s时发动机转速达到稳定,发电机电压平稳。加速到30km/h,发动机-发电机系统和动力电池共同为驱动电机提供能量,动力电池电流见图15。加速过程中,发动机转速在2 450r/min上下波动,见图16。图15中,当t=69s时电池输出电流达到最大值
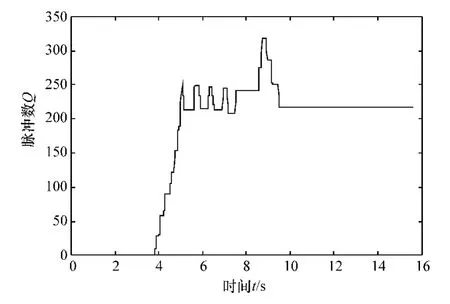
图11 步进电机脉冲个数响应
在此基础上,进行了道路实验,动力电池SOC=50%,发动机工作在转速闭环模式,电驱动机动平台车速从0加速到约30km/h。

图12 发动机的转速响应
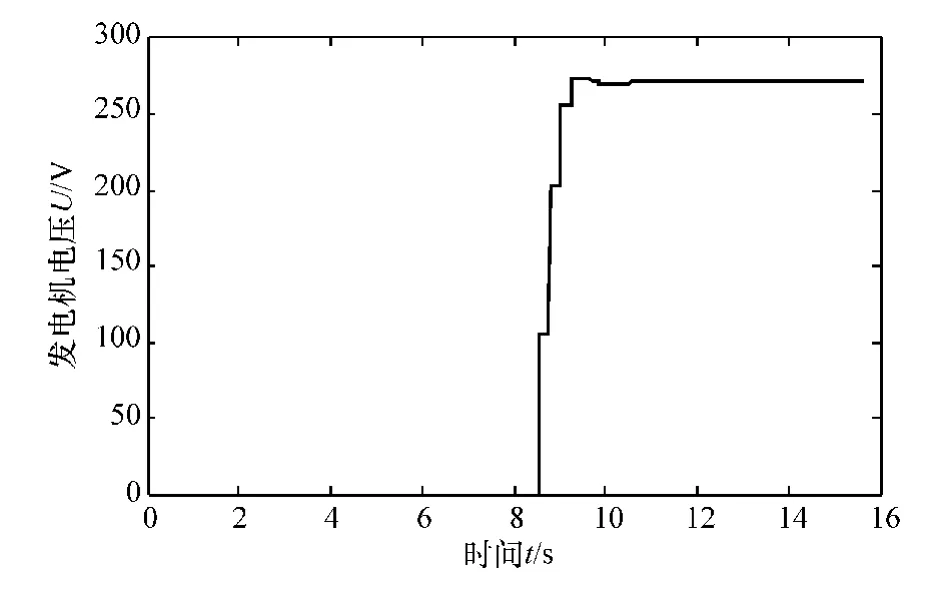
图13 发电机电压起动波形
如图14所示,t=65s时平台开始加速,t=68.5s 30A,综合控制单元给发动机控制单元发送转速点变换指令,发动机工作在下一个转速点,如图16中约1.5s后发动机转速稳定在3 750r/min上下。最后在车速30km/h左右进行了油门开度变化测试,结果表明,动力电池电流明显变化,但发动机转速稳定,实现了发动机的转速多点控制,在功率瞬时变化时发动机转速保持稳定。

图14 电驱动机动平台车速
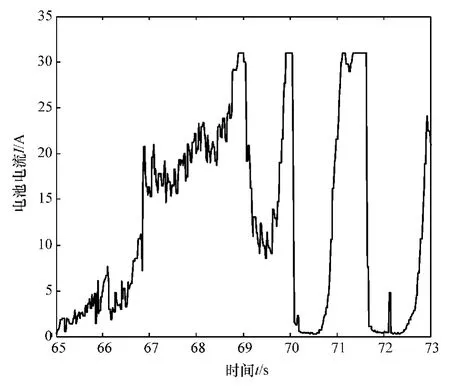
图15 动力电池的电流

图16 发动机转速
3 结论
本文中为电驱动机动平台设计了步进电机控制系统,对发动机转速施行模糊PI闭环控制,有效解决了发动机转速控制难的问题。
(1)设计了步进电机DSP控制系统,实现对电驱动平台发动机齿杆的电动控制,开环控制时,步进电机响应时间短,达到平稳无波动。
(2)实现了发动机-发电机系统转速闭环模糊I控制,发动机调速稳定,发电机输出的电压平稳,满足平台对发动机控制的要求。
(3)在道路实验中,发动机电动控制能响应能量控制指令,发动机-发电机系统和动力电池能为驱动电机提供可靠的能量输出。P
