基于模型的DPF主动再生排气温度控制∗
2019-03-11黄铁雄胡广地杨明亮
黄铁雄,胡广地,郭 峰,杨明亮
(1.西南交通大学机械工程学院,成都 610031; 2.西南交通大学汽车研究院,成都 610031)
前言
在轻型柴油车系统中,采用缸内远后喷油辅助颗粒物捕集器(DPF)主动再生的后处理技术由于其空间布局、成本、对柴油机颗粒物(PM)的高捕集效率等优势,已被认为是满足日益严格的最新排放法规的有效手段[1]。目前国内外对DPF设计、材料、催化剂等方面研究已取得长足的进展[2];由于车辆在实际道路行驶中其负荷、环境等的复杂多变性,加之DPF主动再生过程是受高随机因素干扰、具有强惯性和纯滞后的非线性分布参量时变过程,发生在DPF内部的催化氧化反应受排气流量、氧含量等影响同时表现出较强的非受控特性。非受控再生发生时,DPF过滤体承载了较高的热负荷和热应力,其内部的峰值温度和温度梯度一旦超过临界许用范围,极易造成DPF过滤载体烧熔、烧裂等问题。因此研究实用、安全和可靠的DPF主动再生控制技术成为推进DPF系统化应用的关键内容[3-4]。
DPF主动再生的本质是热管理。即DPF再生过程中通过引入一外部能量,并合理地控制能量分配使得过滤载体内部累积的碳烟颗粒在排气中O2的作用下被安全、可靠地燃烧掉,恢复发动机排气背压,完成再生过程。在DPF主动再生控制系统中,对能量管理的具体表现即为对温度的有效管理与可靠控制[5]。因此,确保DPF入口排气温度对目标再生温度的动态性能和抗干扰能力,是系统的一项重要控制功能,对于提高DPF再生效率和发动机油耗性能也具有非常重要的作用。臧志成等[6]开展了对DPF再生温度闭环控制的相关研究;ECK C等[7]采用增益调度技术,提出了一种闭环鲁棒策略设计方法,在不同环境温度下的城市驾驶工况验证了其较好的抗扰动性能;BENCHERIF K等[8]基于模型预测控制理论设计了再生控制算法,并与传统PID控制方法进行了对比测试,结果表明最大跟踪误差与PID控制相当,为33.2℃,但超调量明显降低;LEPREUX O等[9]采用基于模型的开发方式研究了一种针对DPF再生的催化转化器出口温度控制方法,并采用欧盟驾驶循环(NEDC)的市区运转循环部分验证了其控制性能,表明对目标温度的控制误差小于15℃。采用基于模型的控制策略开发方式可以降低开发成本,提高开发效率,并增强系统的可靠性和可维护性。考虑实际需求和仿真实时性,本文中首先基于能量守恒和集总参数概念等搭建了仿真对象模型,对仿真模型参数进行了详细标定。在此基础上展开对控制算法模型的设计开发,提出一种基于排气温度和流量优化的DPF再生温度控制算法和控制器结构,并进行了仿真分析等研究工作。本文中最后对设计的控制算法在发动机台架和车辆道路行驶中分别进行了试验验证,分析其在实际应用环境中的控制性能。
1 仿真模型的建立
1.1 仿真模型
DPF主动再生触发后,通过在膨胀行程末往气缸内喷入燃油,这部分燃油不参与燃烧做功而是变成未燃HC与排气充分混合后在柴油机氧化型催化转化器(DOC)装置上发生放热反应,从而实现排气温度提升,辅助DPF主动再生。目前有较多商业软件和相关研究支持对DOC对象建模[10-11],但这些模型往往考虑各种排气组分因素,以及众多状态参量的空间分布,需要求解复杂的偏微分方程组,一般不便用作实时控制算法的开发目的。对控制开发而言,模型需要兼顾计算精度和计算效率。为此,本文中在忽略DOC表面与环境的散热损失(认为该部分能量可以通过控制器设计的积分路径补偿)前提下,同时仅考虑发动机排气各组分中未燃HC组分在DOC内部的氧化反应作用,参照文献[12]并做合理假设和简化处理的基础上,基于能量守恒物理原理建立如下集总参量模型:

式中:Cpg,Cps分别为排气和DOC载体材料定压比热容;ρg,ρs分别为排气和DOC载体材料的密度;V0为DOC载体表观体积;λ为DOC气道总体积占比;Tg,T分别为DOC入口和出口端排气温度;为排气质量流量,DPF主动再生时包括缸内后喷燃油流量;Ts为DOC载体温度;为缸内后喷燃油氧化放热速率;为单位时间内的缸内后喷燃油量;qlv为燃油低热值,取4.285×104J/g;η为DOC对HC的转换效率,为空速和温度的函数,可由试验获取并采用线性插值方式求算;Ac为DOC气道表面总面积;Kc为排气与DOC载体接触表面的对流换热系数。
将式(1)所描述的集总参量对象模型在SIMULINK环境中编程实现,可得到所搭建的仿真模型,如图1所示。
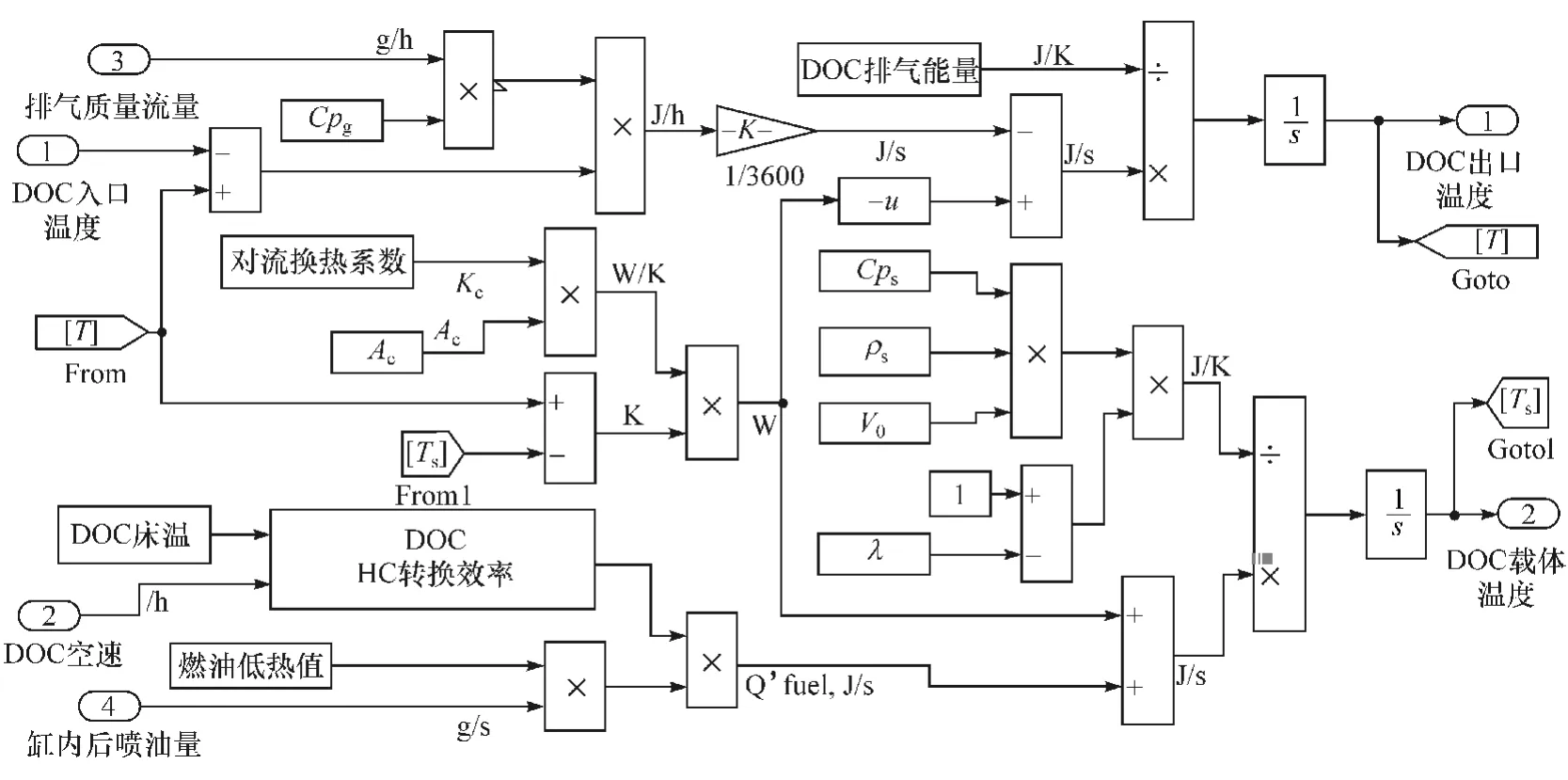
图1 SIMULINK中的仿真模型
1.2 模型验证
为保证上述仿真模型具有合理的稳态精度和动态性能,本文中对仿真模型进行了详细标定。在此基础上展开仿真分析,将仿真计算结果与试验数据进行对比验证。为增强可比性,仿真和试验过程中均设定相同的DOC入口端温度和空速等边界条件,同时按照既定的缸内后喷油量注入燃油(未燃HC)进入发动机涡后排气。图2和图3分别为不同空速条件下的模型仿真计算和台架试验结果。可见,仿真过程中的DOC出口端温度与试验结果的实际DOC出口温度在较高和较低空速工况下均保持了一致的动、静态响应特性。这表明所搭建的仿真模型具有满意的计算精度,适合控制开发目的,为后续的控制算法开发、设计优化等提供了研究基础。
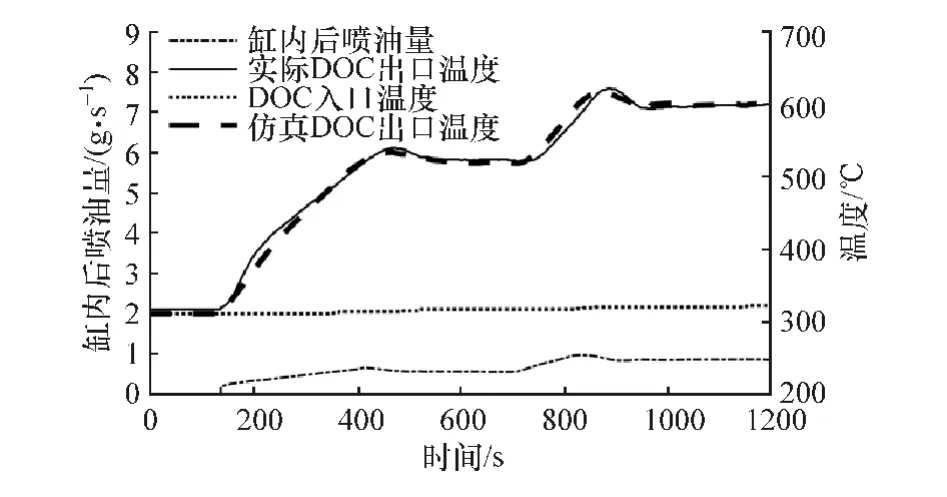
图2 空速5×104h-1时模型仿真与试验结果

图3 空速10×104h-1时模型仿真与试验结果
2 控制算法模型与仿真分析
2.1 控制算法模型
DPF主动再生过程中由于受诸多因素如排气流量、排气氧含量、碳烟颗粒加载量水平等影响,其内部的氧化反应速度、载体温度等往往表现出明显的非受控特性[13]。因此,所设计的算法对DPF入口端温度的控制性能尤为重要,以降低DPF内部峰值温度与温度梯度,防止催化剂失效与过滤体烧熔、烧裂等风险。同时,所设计的算法需具有良好的适应性和可操作性,以降低针对不同应用情况的匹配开发与标定工作复杂程度,节约开发项目成本。
从系统物理边界角度,对再生目标温度的控制性能主要受当前排气温度和排气流量影响,独立于发动机转速等运行工况。因此,本文中采用基于发动机排气温度和排气流量的控制增益补偿方式,以较好地解决相同发动机工况下由于边界条件如冷却水温、进气温度与压力等差异以及系统迟滞等所带来的不确定性问题。图4所示为设计的控制算法结构顶层视图,主要由前馈控制路径和反馈控制路径两部分组成。前馈控制量信号和反馈控制量信号叠加后经限幅、1阶滤波器处理后生成最终的控制量输出(即缸内远后喷油量),有效避免系统的强时滞特性引发的振荡。

图4 排温控制算法结构框图
2.1.1 前馈控制路径设计
前馈控制具有预测控制作用,可以根据扰动量或给定目标量迅速执行补偿,不受对象滞后因素影响。因此,在具有强惯性和纯滞后特性的系统中,前馈控制算法对于保证动态响应品质的作用尤为突出。根据式(1),考虑在稳态工况下,DOC出口、入口端排气和载体温度在给定缸内远后喷油流量的氧化放热作用下维持相对平衡状态,且DOC出口端排气温度达到目标再生温度,可以得到

式中:Ttrg为目标再生温度;为当前发动机排气质量流量,不包含缸内后喷燃油流量组分;Cpexh为排气定压比热容,为温度的函数;ηt为DOC转换热效率,可通过试验方式测取,为DOC空速与温度的二维插值MAP。该式经整理后可得对应的前馈控制量为

由该式可以看出,发动机加、减速情况下前馈控制路径可以综合当前发动机流量、排气温度和目标再生温度等,立即响应并补偿控制量输出。
2.1.2 反馈控制路径设计
反馈控制路径采用经典PID控制形式,其控制律为

式中:e(t)为偏差量输入;u(t)为PID控制器的输出;Kp,Ki和Kd分别为比例增益、积分增益和微分增益。各控制分量的增益参数即比例、积分、微分控制增益均设计为当前排气流量和排气温度的函数(见图4),采用线性插值。由于在低排气流量下系统的热时滞作用显著增强[14],为保证动态响应性能在低排气流量工况下一般需要以前馈控制作用占主导,采用较小的控制增益参数,以削弱PID反馈控制作用,避免振荡;而高排气流量情况下则反之。因此,采用排气流量和温度的增益补偿方式也使得标定优化工作更具备可操作性,有规律可循。

图5 反馈控制路径PID算法设计
图5为PID反馈控制路径的内部详细设计示意图,滤波处理后的偏差量分别与比例控制增益、积分控制增益、微分控制增益作用后形成各单独控制分量输出,方便监控调试。比例控制分量、积分控制分量与微分控制分量叠加并经限幅处理后形成最终的反馈控制量。为了防止积分饱和,积分控制路径中设计了积分抗饱和模块以保证系统控制性能。
2.2 联合仿真分析
上述控制算法模型与本文中前述仿真对象模型在SIMULINK中构建并完成集成、参数整合后,可进行模型级的联合仿真测试。开展联合仿真对算法模型中的比例、积分、微分和前馈等各控制环节的控制参数进行系统化整定和测试优化,以初步评估算法性能与控制品质。
联合仿真中采用ODE4求解器,并设置算法模型部分的仿真步长为0.1s,与ECU中控制算法的实际运行频率保持一致。图6所示为对各控制参数进行系统整定后、发动机输出转矩突变情况下的仿真测试结果。图中排气流量取自台架实测数据,作为本次仿真的输入。可以看出,在仿真开始后180和360s处排气流量急剧变化的情况下,实际DOC出口端温度保持了对目标温度较好的跟踪特性并能迅速趋于稳定,仿真过程中控制误差在±25℃以内。

图6 排气流量突变情况仿真结果
通过模型的联合仿真方式可进一步对再生过程的控制参数开展相关研究工作。如主动再生初始阶段需要将DPF入口端排气温度提升到较高水平,此时选择合理的目标温度上升速率尤为重要[15]。目标温度上升速率过大则会带来较大的控制超调量引发再生风险,同时易导致HC泄漏造成二次污染;上升速率太小则不利于快速完成再生,影响发动机燃油经济性。因此,本文中对不同目标温度上升速率情况下的控制效果进行了对比,仿真结果见图7。由该图可知,为保证安全可靠,再生选择3~10℃/s的温度变化速率可较好地满足DPF再生要求。
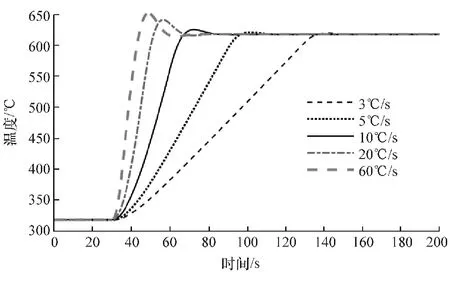
图7 不同温度上升速率控制效果对比
可以看出,通过在算法建模阶段开展仿真优化,评估动态性能和控制品质,有利于降低控制算法在实际环境中的试验风险,节约开发时间。
3 发动机台架与整车试验验证
SIMULINK环境建立的控制算法模型可自动生成产品级的程序语言代码,将该部分控制代码集成到现有发动机控制系统软件之中,并编译、下载到发动机ECU控制单元。在一台满足国五排放法规的柴油发动机及装配该试验用发动机的某轻型皮卡车上分别进行了试验验证。试验用发动机为江铃4JB1型四缸直列、增压中冷柴油机,柴油发动机及所配套的DPF后处理器等各产品技术参数分别见表1和表2。

表1 发动机技术参数
3.1 台架试验验证
发动机试验台架的总体布置示意图如图8所示。在发动机排气管路安装由DOC和DPF组成的后处理器,后处理器的DOC出口、入口端和DPF出口端均布置了相应的排气温度传感器。为防止试验过程中发动机排气背压过高,恶化发动机工作性能,在DPF两端布置了压差传感器,以实时监测排气背压情况。主动再生过程中利用高压共轨系统灵活的多次喷射特性,在上止点后120°CA附近设置远后喷射,该部分喷油在缸内生成未燃HC随后在DOC内发生催化型氧化放热反应,达到排温控制目的。
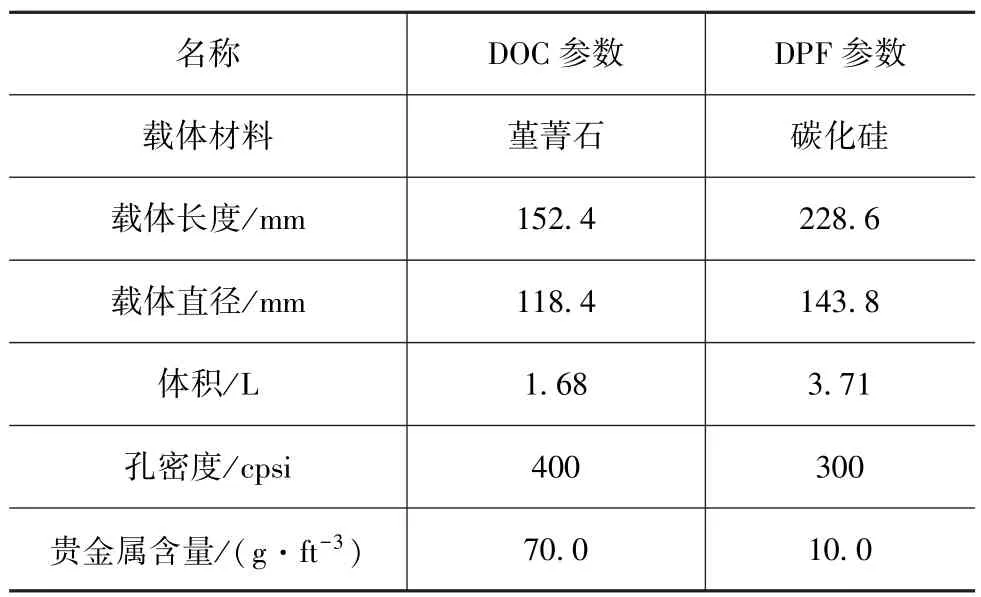
表2 后处理器技术参数

图8 台架试验总体布置示意图
台架试验中通过调节转速、测功机负载等来模拟发动机瞬态工作过程,以分析设计的算法策略在实际应用中的控制性能。本文中选取了两种不同发动机工况下的台架试验结果,如图9和图10所示。两种试验工况分别代表了两种不同大小的发动机排气流量情况。图9所示为较低排气流量(160kg/h)下的试验结果,试验开始时设置发动机转速为1800r/min,转矩为40N·m;图10表示在较高排气流量(325kg/h)下的试验结果,对应的发动机工况为转速2 400r/min、转矩100N·m。分析图9和图10的试验结果可知:再生初始阶段对于由目标再生温度变化引起的超调量小于3%,系统快速趋于稳定,无静态误差;在600s后发动机转速和油量同时变化的瞬态工况模拟测试过程中,实际温度对目标再生温度的跟踪误差小于25℃,超过25℃部分的持续时间小于20s。这表明前述的排温控制算法策略在实际应用中实现了满意的控制效果,并表现出了较强的动态响应性能和镇定品质。

图9 排气流量160kg/h时台架试验结果

图10 排气流量325kg/h时台架试验结果
3.2 整车道路试验
车辆在实际道路行驶中多为急加速或减速等瞬态工况,瞬态工况下的车辆行驶速度、路面负载情况以及发动机排气流量、排气温度等扰动因素的变化更加剧烈。在装配了台架试验用发动机的某皮卡车上进行了车辆在实际道路行驶的试验验证。图11~图13中给出了3种典型驾驶工况下的道路试验结果,分别为市区工况、郊区工况和高速工况道路行驶情况,代表的平均驾驶车速分别为 40,70和100km/h。由试验结果可知,实际道路驾驶过程中在车速、DOC入口端排气温度、排气流量等扰动量急剧变化的情况下,本文中的算法策略与上述发动机台架试验结果表现出较为一致的动态响应品质和抗干扰能力,控制误差除高速工况外均小于25℃,超过25℃部分持续时间均小于20s。高速工况下由于DOC入口端排气温度变化剧烈,对实际控制性能有较大的影响,可进一步优化特定工况区域的增益补偿,改进控制效果。
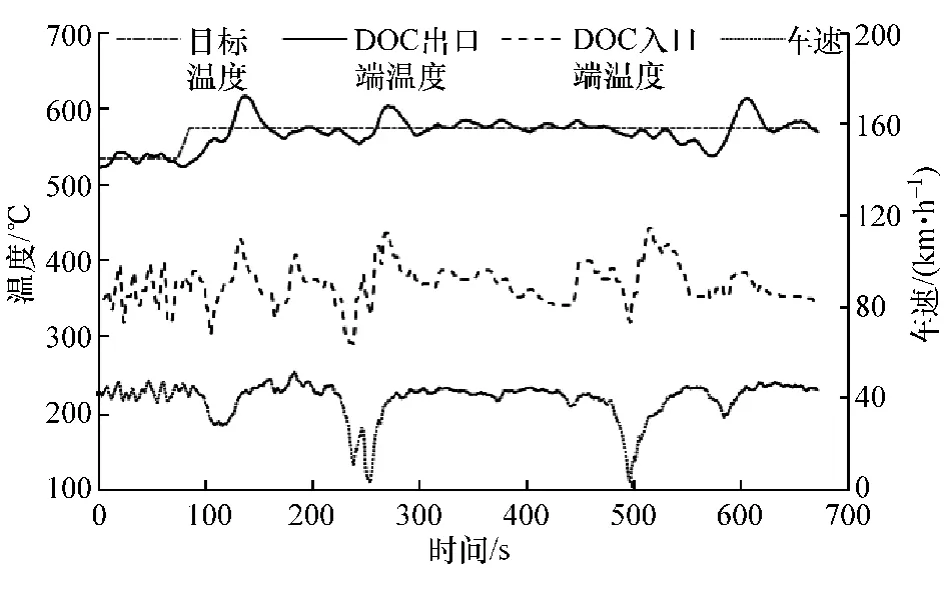
图11 市区工况车辆道路试验结果

图12 郊区工况车辆道路试验结果
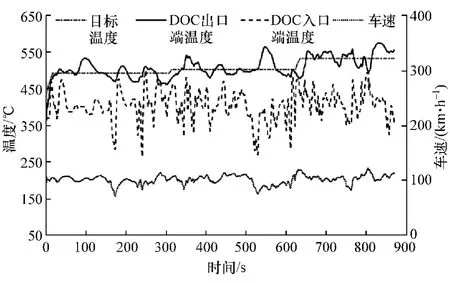
图13 高速工况车辆道路试验结果
4 结论
(1)本文中提出了一种采用发动机排气温度和排气流量作为增益补偿的DPF主动再生目标温度控制方法,并通过台架和车辆道路试验验证了其良好的动态控制性能和复杂工况适应能力。有利于促进安全和可靠再生,对于提高DPF再生效率和发动机油耗性能等也具有非常重要的作用。同时,采用基于排气温度和排气流量的控制增益补偿方式使得算法策略兼顾了性能和成本因素,降低了实际工程应用中标定工作的复杂程度。
(2)采用基于模型的控制策略开发方式能够显著提高开发效率,降低开发风险,节约开发成本。通过在算法建模阶段开展仿真优化,评估动态性能和控制品质,有效避免了发动机台架、整车试验过程中由于温度控制不当引发的DPF失效、损毁风险。
(3)采用本文中提出的温度控制策略,能够有效控制排气温度至DPF主动再生需要的目标温度并维持较强的控制品质和适应性能。仿真和试验结果均表明,主动再生过程中对实际排温控制的超调量小于3%,在发动机瞬态工况、车辆加减速等强扰动工作工况下,稳态误差小于25℃。
