3种主动合成孔径成像技术极限探测能力的分析与比较
2019-03-09卢振武刘欣悦
董 磊,卢振武,刘欣悦
(1.中国科学院 长春光学精密机械与物理研究所 光电探测部,吉林 长春130033;2.中国科学院大学,北京100049)
1 引 言
中高轨空间目标,尤其是人造目标的搜索发现和高分辨率成像,对空间态势感知、国防安全和军事防御和打击等领域的巩固和发展非常关键。现有的空间目标探测成像技术,仅能实现低轨卫星的成像。要实现地基对中高轨(约36 000 km)目标的成像分辨率(0.5 m@0.532μm),如采用传统光学成像方式,则需要38 m以上的有效口径。单镜很难实现,采用拼接镜共相的方式将是一个非常复杂和困难的大工程,目前国际上还没有实现该目标的有效技术手段。另外,传统可见光及近红外波段光学望远镜通常采用被动探测技术,无法实现在地影范围内的观测,白天强天光背景下的观测能力也很有限,有效观测时间短,无法做到24 h全天候观测。
因此,本文寻找新型成像体制和技术,以规避传统光学成像体制的缺点,从而为实现地基中高轨目标的高分辨率成像开辟崭新的道路。
通过广泛调研发现,主动光学成像体制中有3种技术——傅立叶望远镜、成像相关术和剪切光束成像——可通过干涉合成的方式组成几十米以上的等效口径,是对中高轨目标(同步轨道目标)实现高分辨成像较有希望的3种技术。这3种技术的成像原理有较大差异,所包含的关键技术和器件也各有侧重,重构算法也不尽相同,且都较为复杂,所以每种技术都需要投入大量的时间和精力进行深入研究。为了能尽快选出一种适合中高轨目标高分辨成像的技术,避免广泛研究造成有限研究资源紧张,本文提出一种适合3种成像技术的统一信噪比模型,并分析比较了3种技术探测能力的差异。
通过调研可知,已有文献分析了这3种成像技术理论信噪比的表达式[1-4],为探测能力的研究奠定了基础。但每种技术的表达式都较为复杂,没有给出一个统一简洁的信噪比模型。文献[5]给出了傅立叶望远镜的探测能力分析,为探测能力统一模型的建立提供了很好的思路,但却没有将其应用到另外两种技术中,没有比较3种成像技术探测能力的差异。本文在上述文献对信噪比和探测能力分析的基础上,提出适用于这3种成像技术的统一信噪比模型和探测能力分析模型,以同步轨道(约36 000 km)为例,定量给出3种成像技术的探测能力数值(成像所需最低激光发射功率或能量)。本文结论可作为选择适合中高轨目标高分辨成像可行技术的有效参考。
2 基本成像原理
2.1 傅立叶望远镜成像原理

图1 傅立叶望远镜系统示意图 Fig.1 Scheme of imaging system of Fourier telescopy
傅立叶望远镜[6-9]采用3束(或更多)经过移频和准直的激光束同时照射目标。通过改变地面发射基线位置以实现改变空间频率的目的。目标反射光则包含了与发射基线空间频率相对应的目标频谱信息。光学能量接收系统用于收集目标反射光,经过时间解调和相位闭合处理后可以得到与发射基线空间频率相对应的目标傅立叶分量。在获得足够多目标傅立叶分量的基础上,通过逆傅立叶变换即可重构目标图像。傅立叶望远镜系统组成和图像重构流程的示意图分别如图1和图2所示。

图2 图像重构示意图 Fig.2 Scheme of image reconstruction
傅立叶望远镜的主要优点为:(1)主动合成孔径,通过增大基线以实现几十米甚至上百米的有效口径合成;(2)受大气湍流的影响较小,不需要复杂昂贵的自适应光学系统;(3)将目标的空间信息调制到时间域,不需要高光学质量的接收镜,只需大面积的能量接收镜(光桶)即可实现高分辨力成像。
2.2 成像相关术成像原理
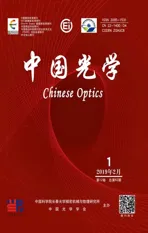
成像相关术[10-12]采用一束激光照射目标,在接收系统的光瞳面(非成像系统的接收面)测量两个不同位置处(对应目标的某个空间频率)的光强波动(成像示意图如图3所示)。对两个被测量进行相关运算,可获得目标光强分布的自相关函数,从而估计目标傅立叶变换的模值。再利用相位恢复技术获得目标傅立叶变换的相位。这时已获得目标完整的傅立叶变换频谱,最后通过逆傅立叶变换得到目标图像。
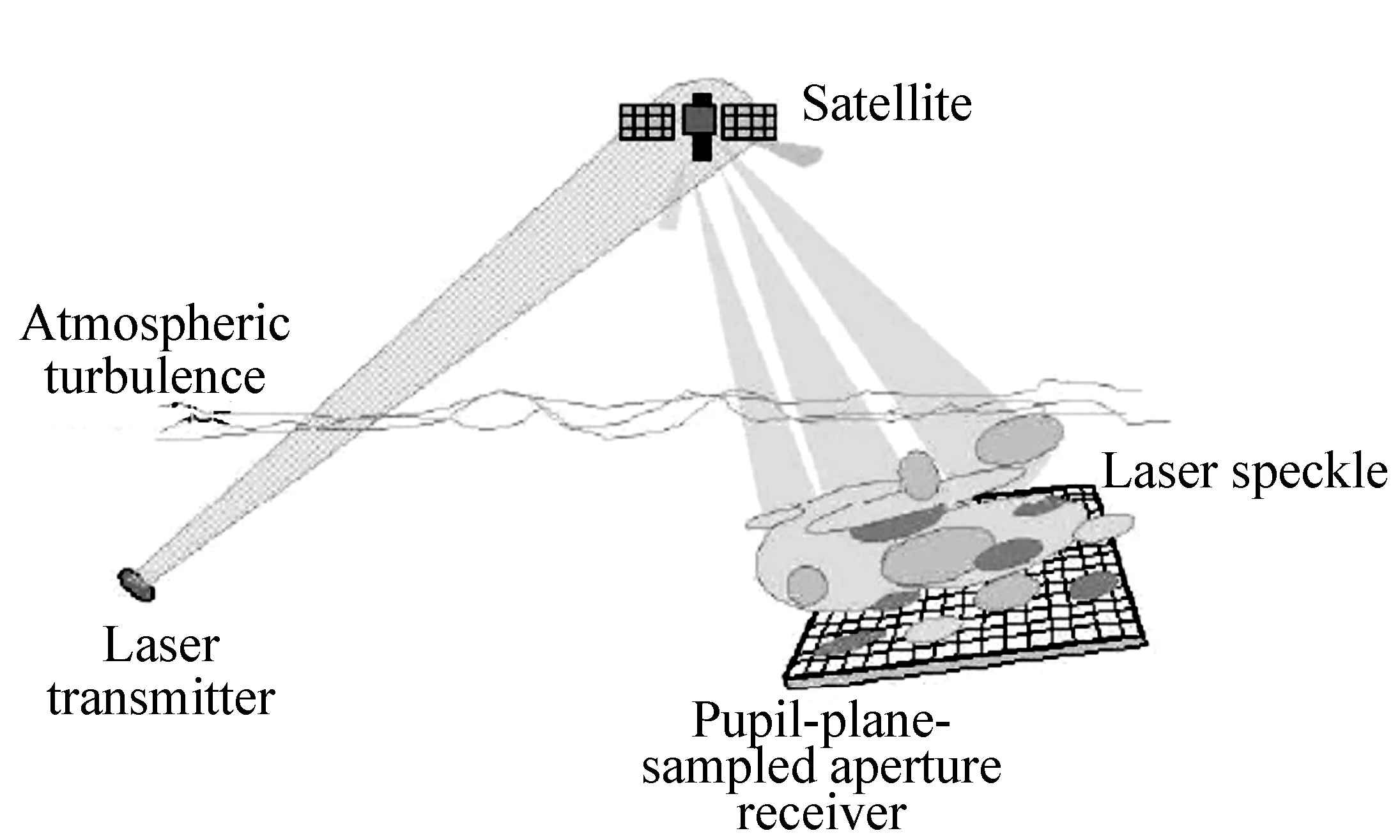
图3 成像相关术概念示意图 Fig.3 Conceptual scheme of imaging correlography
因激光照明会产生大量散斑,故实际操作中利用多帧数据平均可有效降低散斑噪声的影响,并提高傅立叶变换模值的估计精度。成像相关束的图象恢复流程图如图4所示。

图4 成像相关术恢复流程 Fig.4 Retrieval diagram of imaging correlography
成像相关术的主要优点是:(1)通过增加接收基线的长度,可不断增大有效合成孔径,从而实现高分辨力成像;(2)只需测量地面不同位置处光强随机波动的相关性,受大气湍流的影响很小,且只需要能量接收镜,不需高质量光学镜。
2.3 剪切光束成像原理
剪切光束成像[13-14]利用三束经过不同频率移频的激光同时照射目标(成像原理示意图如图5所示),这三束激光在发射平面的位置组成一个固定的“L”型,经过目标反射的回波在地面处同时形成两个正交方向的剪切。回波光由大面积阵列探测器同时接收,经过时间解调后可区分任意两光束形成的剪切量。接收光瞳面上不同位置的剪切量对应该区域内两光束各自产生的目标光场傅立叶频谱的相位差。通过波前重构算法累加(或积分)所有剪切区域内的相位差(或相位梯度),可获得目标振幅分布的远场衍射波面。然后将衍射场进行逆傅立叶变换获得目标振幅分布,再经过取模和平方即得到目标光强分布。目标的单帧恢复图像具有严重的散斑噪声,通过多帧平均可降低散斑噪声的影响。剪切光束成像图像恢复流程图如图6所示。
剪切光束成像的主要优点有:(1)通过增大探测器阵列的规模,即可不断增大有效合成孔径以实现高分辨力成像;(2)三束发射光束的夹角很小,使得三光束几乎经历相同的大气传输路径,因而受大气湍流的影响很小;(3)每次发射激光,探测器阵列都可获得目标的完整信息,从而可实现对目标的瞬态(实时)成像。
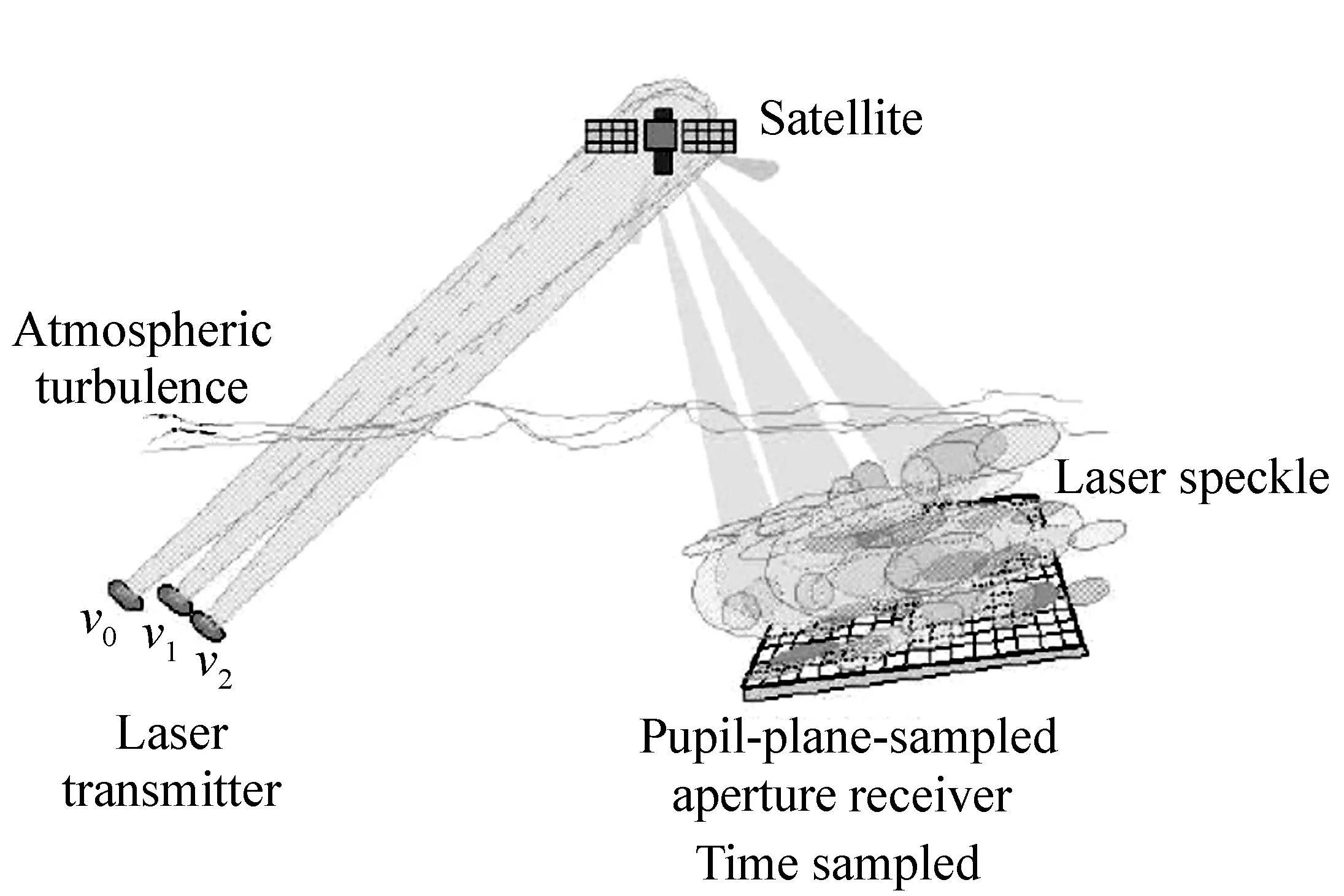
图5 剪切光束成像概念图 Fig.5 Conception diagram of sheared-beam imaging

图6 剪切光束成像恢复流程图 Fig.6 Retrieval diagram of sheared-beam imaging
3 探测能力分析
传统光电望远镜探测能力一般采用信噪比和可探测星等来描述,例如加载自适应光学系统的望远镜一般要求在信噪比为5时,可探测星等约为6等星(受限于大气相干长度r0,上述结果基于一般情况下的r0(约10 cm)计算得到)。对于采用激光器作为光源的主动成像系统来说,在指定作用距离和目标尺寸等主要参数后,利用激光发射功率(或能量)来表征探测能力的强弱则更加直观,即所需功率(或能量)越低,则探测能力越强。
另外,本文分析的3种主动成像技术均利用合成孔径方法实现高分辨率成像。基线阵列的形状决定了分辨率,阵列中单个望远镜口径对探测能力起主要影响。为了使探测能力的分析更有实际意义,本文对探测能力的分析都是在相同基线布局结构下(即具有相等的分辨率)开展的。
探测能力的分析离不开信噪比模型的构建,所以首先选择一个合理的信噪比模型作为蓝本,在此基础上进行改进得到符合3种主动成像技术机理的专用信噪比模型。3种主动成像技术虽然都具有干涉特征,但均没有包含与信号光的载波波前完全匹配的本地参考光,更不存在信号光与参考光的混频,故这3种成像技术均属于直接探测方式。传统光电成像望远镜的探测方式也是直接探测,故其信噪比模型可作为上述3种成像技术具体信噪比模型的基础。
3种主动成像技术的探测能力分析如下:首先,选择光电倍增管(3种技术均可采用该器件作为探测器)的信噪比模型[15]作为基础,加入天空背景光噪声的影响,作为3种技术共同的信噪比模型;根据主动探测和成像经常采用的作用距离方程[16-17],建立发射激光和目标光产生的探测器电流之间的关系;根据作用距离方程中回程(下行)链路的关系式,建立天光背景亮度与其产生的探测器电流之间的关系;最后将目标光电流表达式、天光背景电流表达式和探测器自身暗电流噪声等参数带入信噪比模型,从而得到3种主动成像技术所需的发射激光功率(或能量),通过比较即可获得3种主动成像技术探测能力的强弱。上述分析步骤的流程图如图7所示。

图7 3种主动成像技术探测能力的分析流程图 Fig.7 Flow chart of detection capability analysis for 3 kinds of active imaging technologies
在这里需要指出的是:为了计算的方便,大气的影响只考虑大气散射和吸收对光能的衰减作用,大气湍流对光束强度闪烁、面形和传播方向的影响被忽略(虽然一些文献指出这3种技术中湍流对光束面形的影响免疫[2],但某些技术还是会受到强度闪烁或光束到达角变化的影响[18])。所以本文给出的只是一个探测能力的初步分析结果,更加详细的分析将在后续发表的文章中给出。
3.1 信噪比模型
傅立叶望远镜、成像相关术和剪切光束成像这3种新型主动成像技术,均可采用光电倍增管或其阵列作为探测器。因光电倍增管具有大靶面(cm级以上)、高速响应(ns级)和模拟输出等特点,故可作为首选探测器。本文选用基于光电倍增管探测和噪声特点的信噪比模型[15]。在一次数据采集时间tint(以下称为积分时间)内,系统的信噪比SNR表示为:
(1)
式中,IM为目标光引起的探测器阴极电流,IM=SM·e,e为电子电荷;IB为天光背景引起的探测器阴极电流,IB=SB·e;B为系统工作带宽;F为噪声指数,典型值为1.2;Id为阴极暗电流;NA为放大电路噪声,一般较小,在本计算中令NA=0。
3.2 激光发射功率模型
傅立叶望远镜、成像相关术和剪切光束成像这3种新型成像技术均属于主动成像技术,适合采用发射激光功率表示其探测能力。已知在积分时间tint内产生的信号电子数SM等于:
(2)
式中:h为普朗克常数,h=6.626 176×10-34(Ws2);λ为平均波长;c为光速,c=2.997 925×108(ms-1);η为探测器量子效率;Pr为探测器接收光功率。根据激光作用距离方程,可得激光发射功率Plaser的表达式如下:
(3)

3.3 天光背景模型
对于天光背景,在积分时间tint内产生的信号电子数SB等于:
(4)
式中:v=c/λ;LB为背景辐射亮度;Ad为单元探测器面积;τa为大气平均透过率;τ0为光学系统平均透过率;F为光学系统相对孔径的倒数。
(5)

通过上面的分析和建立的各模型可知,将单次信噪比SNR、根据公式(2)、(3)和(5)分别计算得到的SM和SB、探测器暗电流Id和其它参数一起代入信噪比计算公式(1),可获得主动成像所需的最低发射激光功率(能量)。
下面将结合每种成像技术的特点,分别计算成像所需的最低发射激光功率(能量)。
4 3种成像技术探测能力的计算
4.1 傅立叶望远镜的探测能力分析
对于傅立叶望远镜来说,有两个参数与传统光电成像技术不同,分别是背景辐射亮度LB和系统工作带宽B。下面将具体计算这两个参数。
(1)背景辐射亮度LB
可见光天空背景辐射亮度光谱特征[19]可通过实测获得,在某波长附近很窄的带宽(10 nm)内,可认为亮度为常数。对于太阳天顶角为60°时的天空背景辐射亮度光谱特征曲线,在其532 nm波长处,光谱亮度约为8 W(m2·sr·μm),在10 nm带宽内天空背景亮度为0.08 W/(m2·sr)。
(2)系统工作带宽B
对于傅立叶望远镜来说,为了满足激光脉宽(10 ns)对差频频率的要求(≥100 MHz),三束最终发射激光的差频频率(中心频率)分别为120、240和360 MHz。
由于傅立叶望远镜将激光能量集中在这3个频率上,且经过大气传输和目标反射后,这3个频率的带宽基本不变,波形近似为正弦函数。故探测器的输出模拟信号在经过放大后可通过组合高频窄带滤波器分别提取3个近似正弦的信号,这样可以极大抑制非调制的天光背景噪声、信号散粒噪声和探测器噪声等对信号的影响。
通过不完全调研,目前滤波器的中心频率可做到大于GHz[20-21],对于320~350 MHz范围内的中心频率,其相对带宽≤0.4%,带外抑制≥55 dB[22]。傅立叶望远镜需要的调制信号最高中心频率为360 MHz。通过调研得知,选择相对带宽≤0.4%(即中心频率360 MHz对应的带宽为1.44 MHz)是较为合理的。
通过上面的分析,可以认为傅立叶望远镜的系统工作带宽为1.44 MHz。
表1 傅立叶望远镜探测能力计算参数
计算傅立叶望远镜探测能力所需参数如表1所示。
根据公式(1)、(2)、(3)和(5)和表1中的参数,可得傅立叶望远镜单光束峰值功率为1.14×109W=1.14 GW,单光束单脉冲能量为1.14×109W×10 ns=11.4 J。
4.2 成像相关术探测能力分析
与傅立叶望远镜的分析类似,先计算成像相关术的背景辐射亮度LB和系统工作带宽B。
(1)背景辐射亮度LB
由于成像相关术可采用和傅立叶望远镜相同波长的激光作为光源,故成像相关术具有和傅立叶望远镜相同的背景辐射亮度LB,约为0.08 W/(m2·sr)。
(2)系统工作带宽B
与傅立叶望远镜不同,成像相关术任意两束接收光束之间没有引入差频,即有用信号没有压缩到单一频率处,而是覆盖在一定宽度的波段内(一般为几百MHz)。通过文献调研可知,有的采用100 MHz[23]的信号带宽,有的采用60 MHz[24]的信号带宽。

表2 成像相关术探测能力计算参数
根据公式(1)可知,SNR与工作带宽B的开方成反比,即带宽越小,则SNR越大。故选择成像相关术的工作带宽B=60 MHz。
计算成像相关术探测能力所需参数如表2所示。
根据公式(1)、(2)、(3)和(5)及表2中的参数,可计算出成像相关术单光束峰值功率为7.34×1013W=73.4 TW,单光束单脉冲能量为7.34×1013W×10 ns=0.73 MJ。
4.3 剪切光束成像探测能力分析
由于剪切光束成像与傅立叶望远镜成像的发射系统配置非常类似,同时发射三束激光,且每束光也均引入不同的移频频率,因此两种成像技术均可采用相同的工作波段和相等的光束移频频率,即剪切光束成像具有和傅立叶望远镜相同的背景辐射亮度LB和系统工作带宽B,分别为LB=0.08 W/(m2·sr),B=1.44 MHz。
计算剪切光束成像探测能力所需参数如表3所示。

表3 剪切光束成像探测能力计算参数
根据公式(1)、(2)、(3)和(5)和表3中的参数,可计算出剪切光束成像单个探测器所要求的单光束峰值功率为1.24×1012W=1.24 TW,单光束单脉冲能量为1.24×1012W×10 ns=12.4 kJ。因剪切光束成像需要同时记录剪切面内所有散斑信息(以避免大气湍流和指向随机偏差等的影响),故最终单光束发射激光能量等于上述结果与剪切区域内探测器个数的乘积。
假设等效望远镜口径为30 m(在36 000 km处的线分辨率约为0.6 m),即剪切区域直径为30 m。假设目标直径为5 m,则在地面形成的散斑尺寸约为3.8 m。根据文献[25]可知为了保证采样的准确性,每个散斑在一个维度内应至少包含2个探测器单元,又因剪切区域为二维平面,则每个散斑应至少包含4个探测器单元。总探测器单元数约为:(30 m/3.8 m)2×4=250。所以剪切光束成像最终所需单光束单脉冲能量约12.4 kJ×250=3.1 MJ。
5 分析与讨论
根据前面3种主动干涉成像技术的信噪比模型和激光作用距离方程,可以分别获得3种成像技术满足同步静止轨道(36 000 km)成像要求的最低激光发射功率(能量),计算结果如表4所示。表中单位的含义如下:1 GW=109W,1 TW=1012W,1 kJ=103J,1 MJ=106J。

表4 3种成像技术的最低激光发射功率(能量)
从表4可以看出,强度相关术和剪切光束成像所需的激光能量差距在一个数量级以内,均远远大于傅立叶望远镜。究其原因在于影响探测能力的两个主要指标——接收镜有效面积和系统工作带宽。
剪切光束成像的带宽比强度相关成像小(约为1/40),同时单镜面积也较大(约1.4倍),但成像所需同时接收的单元数又较多(约为125倍),上述因素的综合作用使得剪切光束成像所需激光能量比强度相关成像大几倍。
傅立叶望远镜所需激光能量远小于其它两个成像技术的主要原因在于接收镜尺寸不受限。傅立叶望远镜可以采用很多大面积接收镜接收目标某一个频谱信息的回波能量(GLINT项目采用40个10 m×10 m的太阳能定日镜接收回波能量)。而强度相关成像和剪切光束成像需要实现不同接收子区域之间的相关(或相干),故每个子区域的接收尺寸受限(一般只有几米)。
采用MOPA(主振荡器和功率放大)结构,目前可以获得高光束质量(M2<1.5)、高相干性(相干长度为米级)和高重频(500 Hz)的脉冲激光的单脉冲能量可达到J级。如果降低对激光重频的要求(例如10 Hz),则单脉冲能量可达到10 J,甚至更高。
显然,对比上面的计算结果,目前激光器制作水平可以满足傅立叶望远镜中高轨应用(36 000 km)对激光能量(功率)的要求。而对于成像相关术和剪切光束成像来说,如此高的单脉冲能量,难以保证光束质量和相干性(一般要求相干长度大于目标纵深的两倍),所以目前难以做出可用于成像相关术和剪切光束成像的激光器(针对36 000 km的成像距离),从而限制了这两种技术在中高轨目标成像中的应用。
这里需要指出的是,虽然成像相关术和剪切光束成像目前不适合中高轨目标成像,但当距离缩短为1 000 km级时则可以实现高分辨成像(激光发射功率与距离的4次方成正比)。故成像相关术和剪切光束成像可实现对低轨卫星或者飞机、导弹等大气层内飞行器的高分辨成像。
6 结 论
本文在传统光电成像望远镜信噪比模型的基础上,结合3种主动干涉合成孔径成像技术各自的特点,得到适合3种成像技术——傅立叶望远镜、成像相关术和剪切光束成像,统一信噪比模型。再结合激光作用距离方程,可得到3种成像技术的统一探测能力模型。
根据探测能力模型,可以获得中高轨(约36 000 km)成像对3种成像技术的激光发射功率(能量)的要求。通过比较明显看出,3种成像技术对发射激光功率(能量)的要求按由低到高的顺序排列,分别为:傅立叶望远镜、成像相关术、剪切光束成像。考虑到目前高相干性高光束质量高能激光器的研制水平一般为J量级,故这3种成像技术中只有傅立叶望远镜可应用于中高轨目标的高分辨成像。
当然,本文的分析是建立在3种成像技术满足基本成像原理的基础上的,即所采用的均为目前较为成熟的技术和器件。不排除现有的一些前沿技术,例如压缩感知技术、微弱信号检测技术等,或许可提高这3种技术的探测能力,降低对激光发射功率(能量)的需求,从而使目前不适合中高轨成像的技术变成可行技术。新型技术与这3种成像技术相结合的可行性以及对探测能力的提高程度,都需要更加深入的分析,这将是以后的研究方向。