紫外光自组网按需多径距离矢量路由算法
2019-03-08李云红陈锦妮张晓丹
陈 冲,宋 鹏,李云红,朱 磊,陈锦妮,张晓丹
(西安工程大学 电子信息学院,陕西 西安 710048)
0 引 言
紫外光通信通常采用波长为200~280 nm的日盲波段,利用大气中气体分子以及气溶胶粒子的散射作用实现信息传输[1-3]。紫外光自组网可解决紫外光通信中发射功率低、大气衰减严重、通信覆盖范围小等问题[4],其优良特性在军事与民用通信领域具有广泛的应用前景[5]。
1979年,DAVID团队[6]基于椭球坐标系建立了单次散射通信模型;文献[7]在文献[6]的基础上建立了共面条件下的非直视单次散射通信模型;文献[8]研究了非共面情况下紫外光非直视通信模型性能;文献[9]基于球面坐标系建立了非直视单次散射路径损耗模型,该模型与仿真求得的路径损耗拟合度较好;文献[10]建立了紫外光非直视通信模型,并研究了不同拓扑结构下紫外光非直视3种通信方式的网络性能。影响紫外光通信网连通性能的因素有节点密度、通信覆盖范围、数据传输速率以及发射功率等,考虑上述因素,为保证网络有较好的连通性,网络路由协议的设计至关重要[11];文献[12]在非直视3种模式基础上研究定向洪泛路由,对比分析了其延迟、抖动、吞吐量和能耗特性;文献[13]针对高负载与高移动性情况下AOMDV协议进行改进,延迟和传输率都得到改善,但未分析节点运动区域的变化对性能的影响;文献[14]研究了紫外光非直视定向发送全向接收通信方式下的媒体接入控制(Media access control,MAC)协议,提出基于角度感知的紫外光非视距通信定向MAC协议;文献[15]指出单向链路会影响MAODV协议的路由维护机制,改进后的算法有效提高了路由性能,但仅与未改进的MAODV协议进行对比分析。
本文通过分析紫外光直视传输模型,给出接收光功率的表达式以及单条链路收发装置进行捕获、对准与跟踪的过程。针对紫外光Ad Hoc网络,研究紫外光自组网AOMDV路由协议,详细描述了算法实现过程,并且利用NS2在不同场景下对AOMDV和MAODV路由协议的性能进行仿真对比。
1 紫外光通信模型
1.1 直视紫外光通信模型
紫外光通信分为直视(LOS,line-of-sight)与非直视(NLOS,non-line-of-sight)通信[16]。直视通信就是将发射端与接收端完全对准进行通信。发射端与接收端不需要完全对准,光子经公共散射体散射后到达接收端的通信称为非直视通信。
根据文献[16]所述,一条LOS链路不仅会经受自由空间路径损耗,还会因大气的吸收与散射作用呈指数衰减。LOS链路接收端接收的光功率为

(1)


(2)
通常采用误码率作为评判系统通信质量优劣的指标。一般情况下,良好的通信需要误码率小于或者等于10-5[17]。调制采用二进制通断键控(OOK),忽略系统热噪声影响,在调制信号时隙内,光子数量呈泊松分布,接收端误码率Pe为[18]
(3)
式中:Ns表示每个脉冲间隔时隙接收端接收的光子数量。其表示为
(4)
综合式(3)和式(4)计算可得误码率Pe为
(5)

(6)
根据式(5),(6)可以得出接收光功率为

(7)
假若给定误码率,通过式(7)可以判断发射的信息是否被成功接收。将式(7)的接收光功率Pr作为接收阈值,如果通信中接收到的Pr,LOS大于接收阈值Pr,则证明链路通信良好;如果接收到的Pr,LOS小于接收阈值Pr,则证明链路无法通信。
1.2 节点间的捕获、对准和跟踪
紫外光移动自组网通信链路建立的前提是要实现单条链路节点间的捕获、对准与跟踪。主从节点收发装置完成捕获前的位置关系如图1所示。

图 1 收发装置捕获前位置关系Fig.1 The position relationship of transceiverbefore acquisition
图1中CT是发射装置形成的发射光锥,CR是接收装置形成的视场光锥。主从节点装置的初始相位是任意的,两者的初始相位差随机分布在0°~360°之间。主节点以固定转速运动,从节点转速以某一加速度线性增加,在较短时间内,主从节点从任意相对位置与初始相位差的条件下实现对接,从节点接收到主节点发送的实时相角与方位等信息,完成捕获过程[17]。对准指的是完成捕获后,从节点对接收的信息进行处理,调整自身转速,并在主节点旋转几个周期后,从节点指向相角与主节点相角相等,实现两者直视通信。主从节点收发装置对准时,位置关系如图2所示。跟踪指的是在完成捕获与对准两个过程后,慢慢调整从节点转速,让收发装置始终保持良好的动态对准。
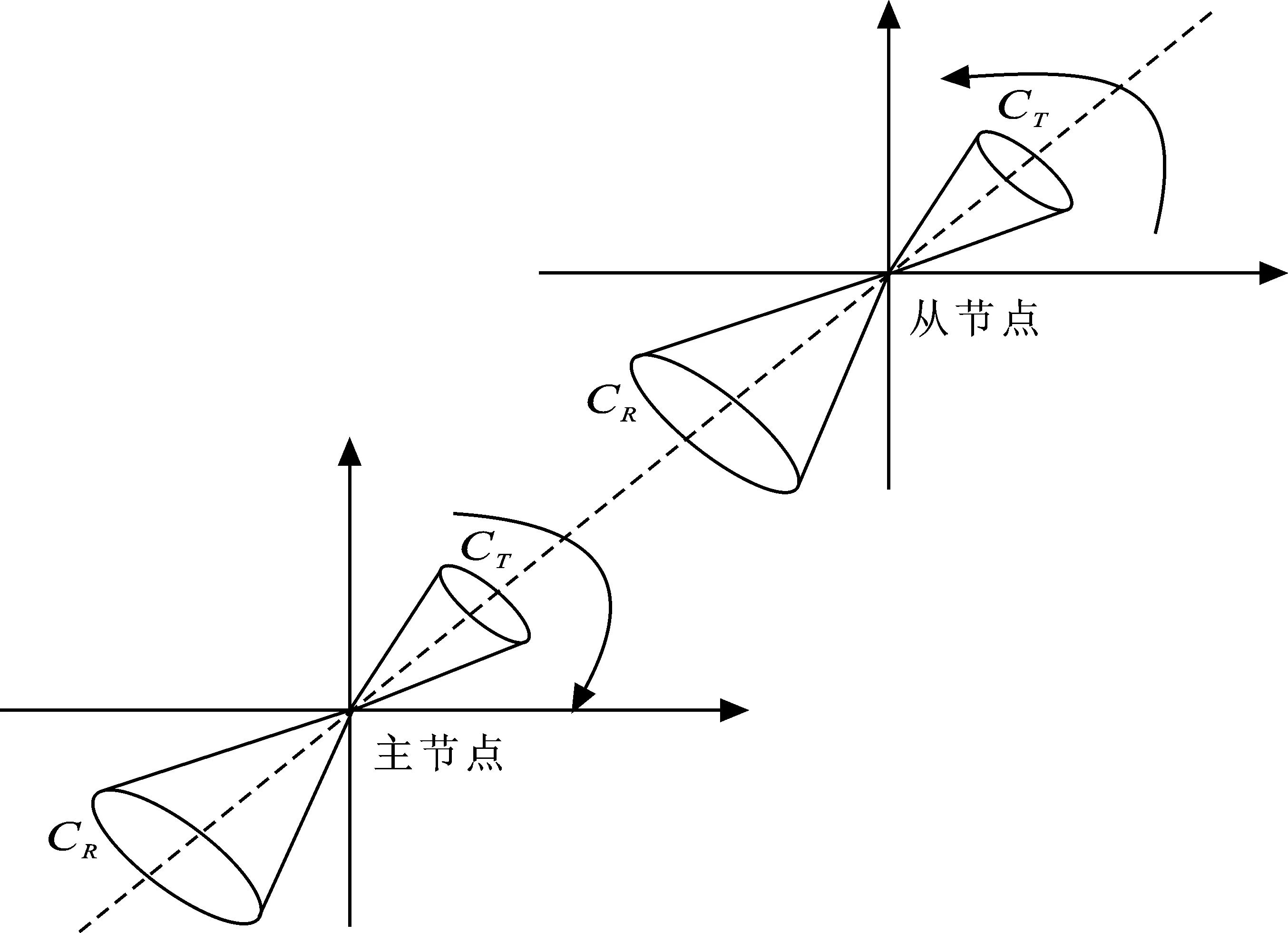
图 2 收发装置对准时位置关系Fig.2 The position relationship of transceiver when pointing
依据式(5),当主节点的偏转角与从节点的偏转角都等于θ,误码率等于10-5时,发射端的传输码速率为
(8)

(9)
式中:(PM)n为第n个光子最多经过M次散射可到达接收端的总概率。
(10)
2 紫外光自组织网络路由协议
2.1 AOMDV路由实现过程
AOMDV 协议的主旨是在路由发现的时候建立多条路由,选择一条为通信的主路由,其余作为备份路由.当主路由发生断裂,启用备份路由进行通信。只有当全部路径都无法正常通信才需要开启新的路由发现过程[20]。AOMDV路由实现的过程如图3所示,其中S为源节点,D为目的节点,其余则是中间节点。图3(a)图建立了两条源节点S到目的节点D的链路不相关路径,其中一条作为主路径,一条作为备份路径;图3(b)展示了主路径发生断裂以后启动备份路径进行通信;图3(c)展示了主路径和备份路径均发生断裂,通信无法正常进行,因此重新开启路由发现过程。图3(d)展示了路径发生断裂后,图3(e)发生断裂处的上一节点E在一跳范围内启动路由发现过程,节点E与D间的扇形区域增加搜索概率。后面节点依照这样的步骤继续搜索,直到重新找到源节点S到目的节点D的通信链路,如图3(i)所示。

图 3 AOMDV路由实现过程Fig.3 AOMDV routing implemented process
2.2 紫外光自组网路由的建立
在实际通信中,通信节点的发射端与接收端指向会不断变化。紫外光自组网路由的建立过程如图4所示。图4中1-2-3-4-6所示为一条通信链路,其中每个节点既有发射端,也有接收端,小角度为发射端发散角,大角度为接收端视场角。源节点旋转,发射端广播路由请求(RREQ)消息。节点2与节点1建立单条链路,节点3与节点2建立单条链路,节点4与节点3建立单条链路,节点6与节点4建立单条链路,节点1到节点6的通信链路1-2-3-4-6建立完成,如图4中黑色实线所示。同样的方法,节点1可以通过节点5与节点6建立起另外一条链路,蓝色点划线所示。到目前为止,网络中1-6节点都与1个或2个节点建立了可靠的链路。因为通信节点的收发装置是旋转的,每个节点在保证可靠链路捕获、对准以及跟踪的时候,邻近节点间的收发装置还有可能形成紫外光非直视通信链路。图4中节点2和节点5有可能建立非直视链路,如绿色虚线所示。图4中节点3和节点5也有可能建立非直视链路,如紫色点划线所示.这样就可以建立节点1与节点6之间的多条通信链路。
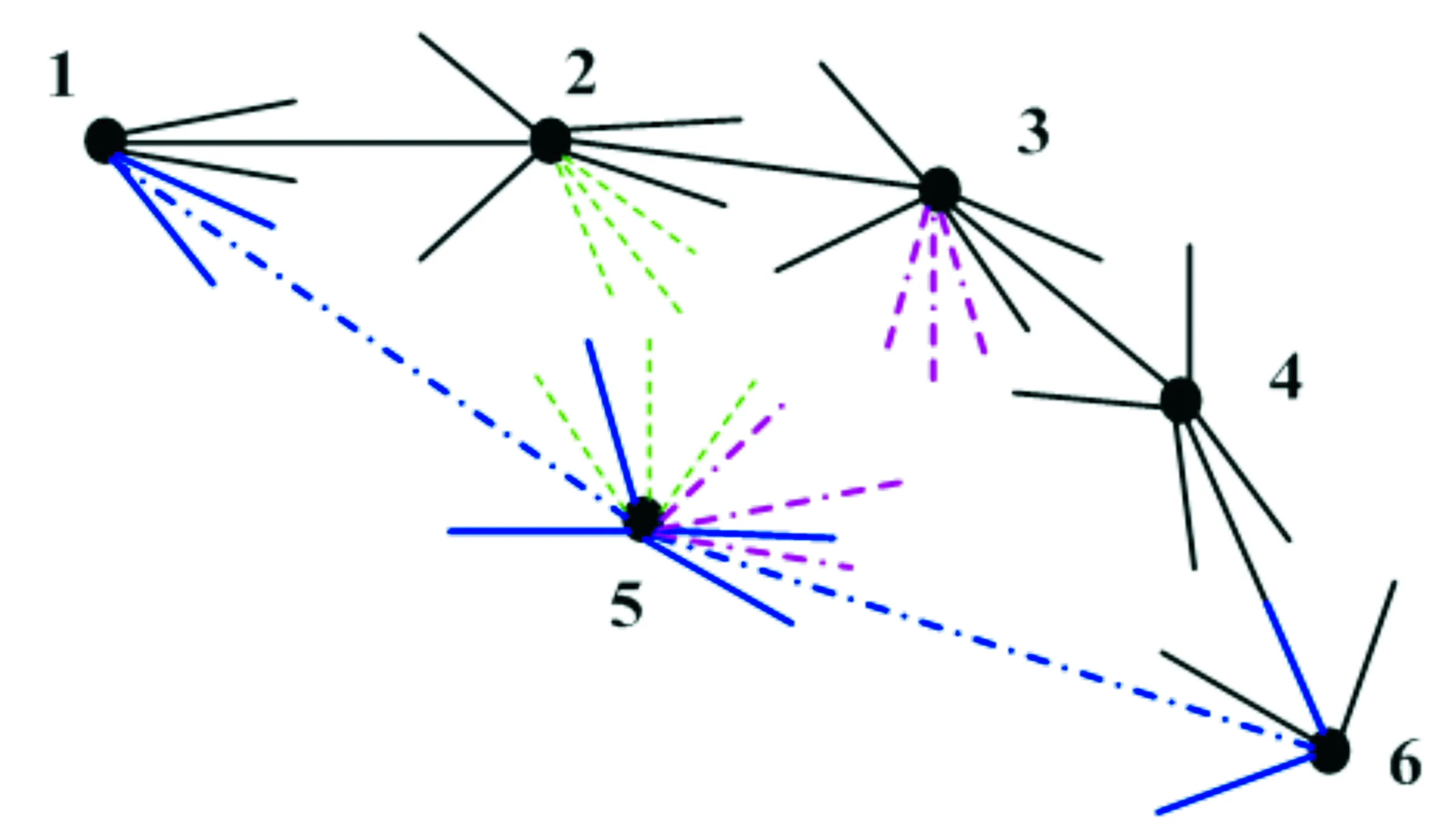
图 4 紫外光自组网路由的建立过程Fig.4 UV Ad Hoc network routing established process
3 仿真与分析
3.1 仿真参数设置
利用NS2进行仿真, Sedest产生节点运动场景,节点在运动区域内自由移动。分别对节点运动区域、节点数目和节点最大移动速度进行仿真实验。仿真参数如表1所示,仿真参数中的接收阈值由式(7)中的接收光功率确定。

表 1 路由协议仿真参数设置
由于运动场景文件是随机生成的,为了使仿真结果准确,利用多次仿真测试结果的平均值评价系统性能。选用以下2个指标对网络路由协议的性能进行分析比较[21]:
(1) 端到端时延=总时延/目的节点接收的总数据包;
(2) 丢包率=丢失的数据包/源节点发送的总数据包。
3.2 不同节点运动区域下的时延和丢包率
移动节点数目固定为15个,节点运动区域范围为(20×20) m2~(300×300) m2,节点运动区域与时延的关系如图5所示。

图 5 节点运动区域与时延的关系
Fig.5 The connection of moving areas and delay
随着节点运动区域增加,MAODV协议时延趋势先上升后下降。其原因是节点运动区域增加导致网络拓扑变化频繁,链路产生故障的频率增高,消耗大量时间修复链路,由此将带来节点时延增加。当节点运动区域很大时,系统的时延慢慢减小,是因为区域太大使得链路的建立更加困难,不得不缩短链路长度,降低了传输时间,延迟减小。AOMDV协议的时延刚开始基本不变,在运动区域长度为100 m以后逐渐增加,在230 m以后时延高于MAODV协议。这主要是由于最初节点运动区域较小,AOMDV协议有自身的备份路径存在,路径断裂时,节点会启用备份路径建立通信链路。随着运动区域的增大,直至所有备份路径完全失效,源节点重新发起路径寻找过程,导致时延最终大于MAODV协议。
移动节点数目固定为15个,节点运动区域范围为(20×20) m2~(300×300) m2,节点运动区域与丢包率的关系如图6所示。
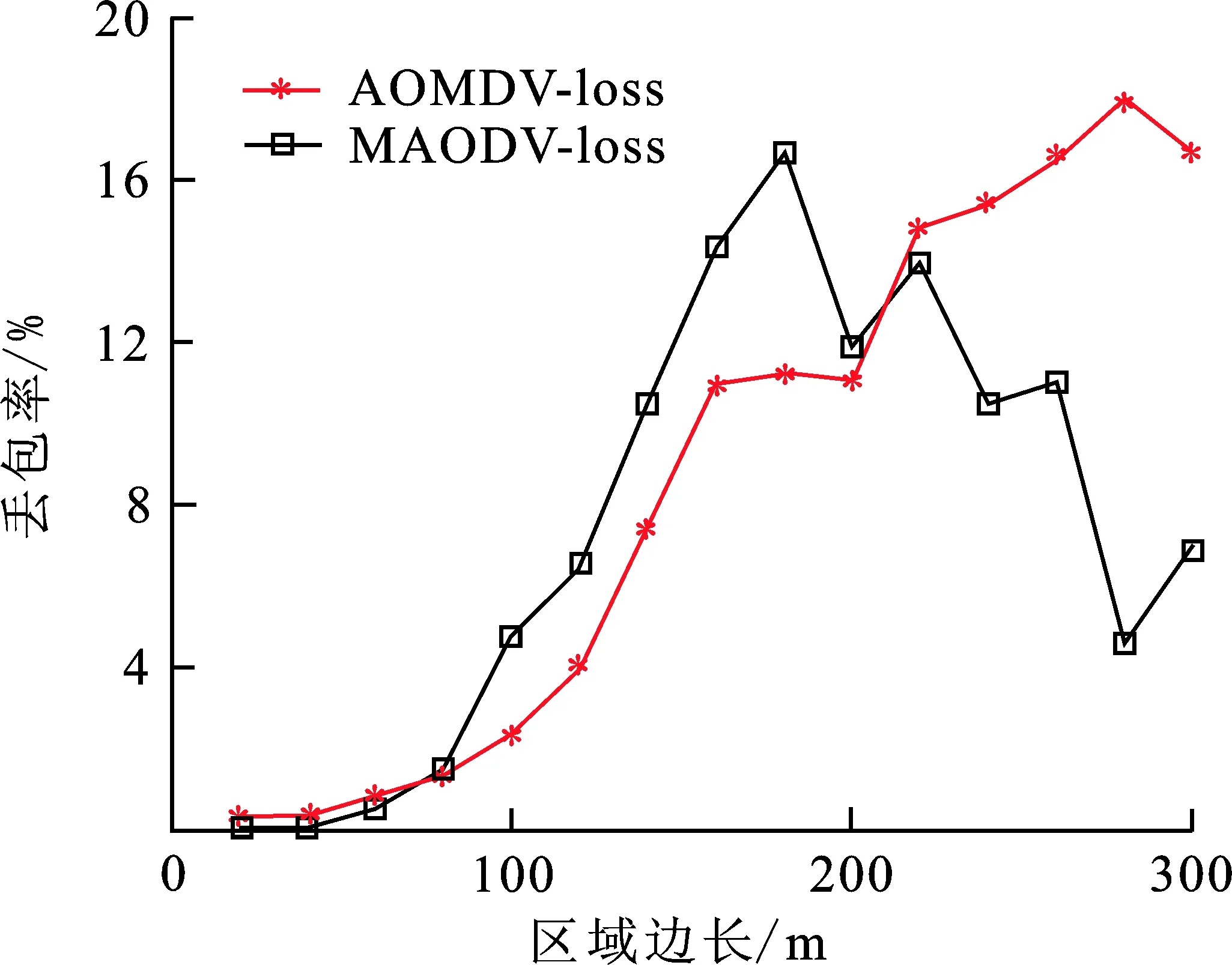
图 6 节点运动区域与丢包率的关系Fig.6 The connection of moving areas and packet loss rate
随着节点运动区域增加,MAODV协议丢包率趋势先上升后下降;AOMDV协议的丢包一直上升。节点数一定,运动区域增大,网络拓扑结构发生变化,数据传输链路遭到破坏,加剧网络拥塞,丢包率提升。当运动区域很大时,MAODV协议丢包率逐渐降低,而AOMDV协议依旧增大。这是因为MAODV协议随着运动区域的增加,通信路径建立变得困难,通信路径长度缩短,丢包减小。AOMDV协议备份路径失效,源节点需要重新寻找传输路径,导致大量的丢包。
3.3 不同节点数目下的时延和丢包率
节点运动区域为(150×150) m2,节点数目变化范围为3~30。节点运动区域固定,移动节点数目与时延和丢包率的关系如图7和图8所示。随着节点数不断增加,MAODV协议时延与丢包率均先上升后下降。原因是节点自由移动,节点数的增加虽使通信链路的建立变得相对容易,但也导致通信链路变长,传输时间增加,丢包现象加重。AOMDV协议随着节点数的增加,丢包率和时延都呈降低趋势,这是由于随着节点数的增加,通信链路的建立变得相对容易,备份路径增多,丢包率和时延相对降低。
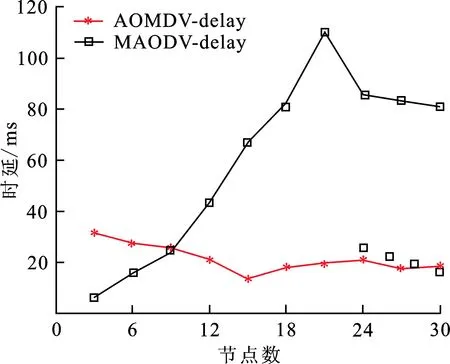
图 7 移动节点数目与时延的关系

图 8 移动节点数目与丢包率的关系Fig.8 The connection of number of nodesand packet loss rate
3.4 不同节点最大移动速度下的时延和丢包率
节点最大移动速度与时延和丢包率的关系如图9所示。设定节点数目为15个,节点运动区域为(150×150) m2,节点最大移动速度变化范围为(5~20) m·s-1,其他参数不变。
由图9可知,随着最大移动速度的增大,AOMDV和MAODV协议时延和丢包率都呈增大趋势。但AOMDV协议的时延和丢包率都远远小于MAODV协议。因为随着最大移动速度的增加,单条链路损坏程度愈加严重,链路修复耗费一定时间,时延增加,丢包率增大。节点最大移动速度10 m·s-1以后,MAODV协议时延和丢包增长速度更快。
4 结 论
(1) 在相同区域条件下,节点数较小时选择MAODV协议,通信性能较好;节点数较大时选择AOMDV协议,通信性能较好。
(2)在相同节点数条件下,节点运动区域较小时选用AOMDV协议,通信性能较好;节点运动区域较大时选用MAODV协议,通信性能较好。
(3)节点最大移动速度增大,AOMDV协议性能表现更优。下一步工作,将研究拓扑结构变化对紫外光自组网AOMDV协议产生的影响。
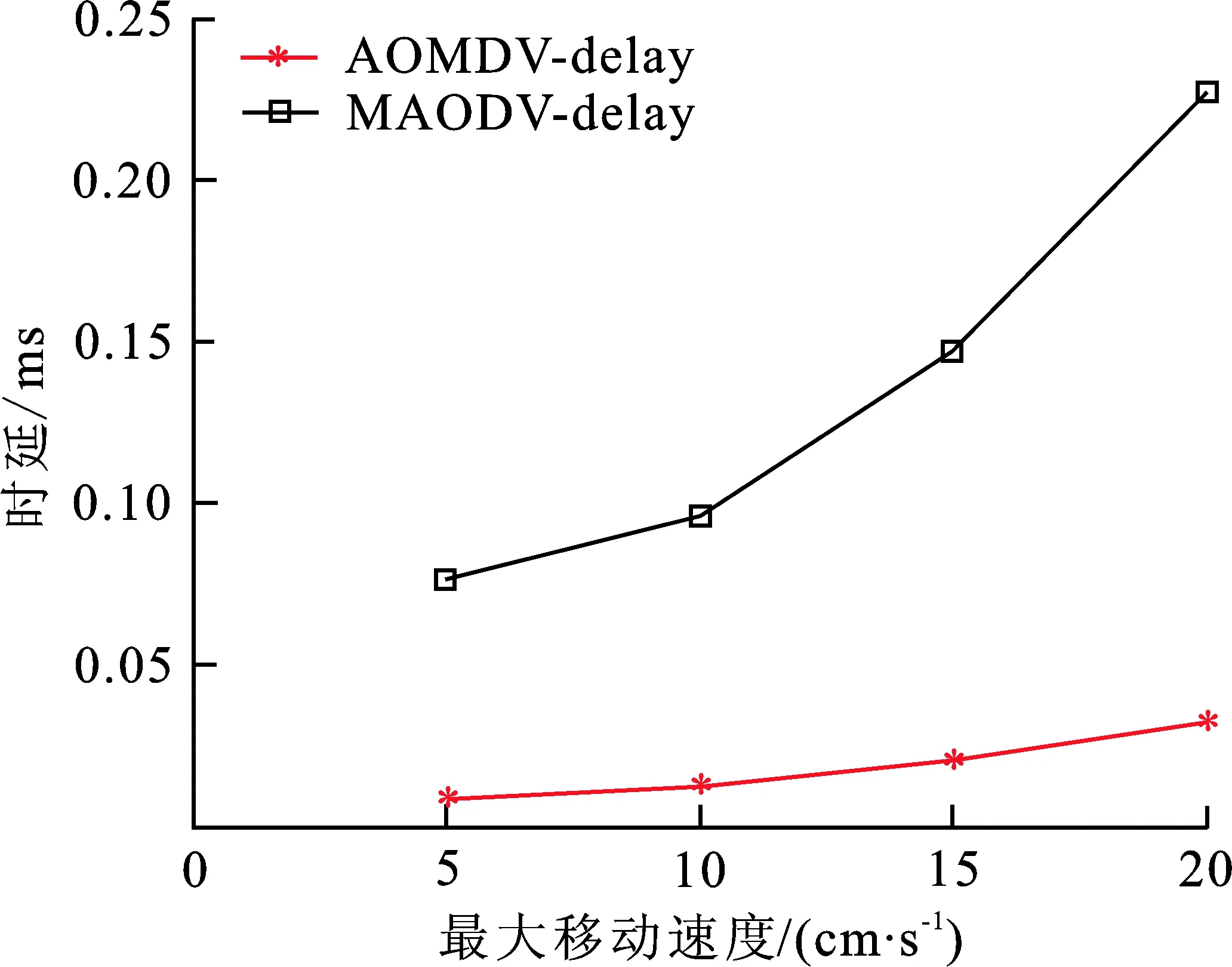
(a) 最大移动速度和时延
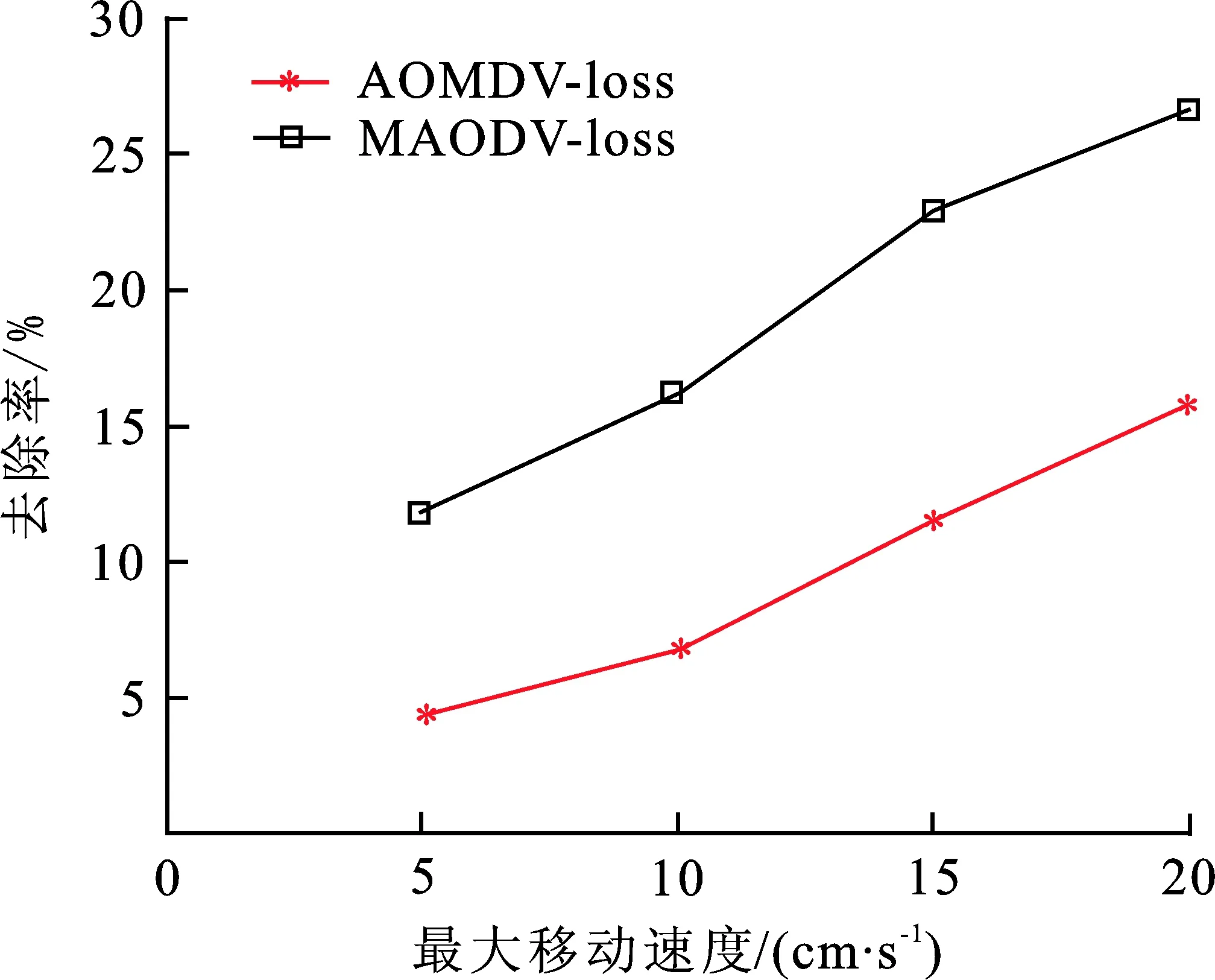
(b)最大移动速度和丢包率
