航天器展开机构间接式主动热控设计方法
2019-03-06
(1 上海微小卫星工程中心,上海 201210)(2 哈尔滨工业大学,哈尔滨 150001)
航天器上暴露在空间环境下的活动机构部件(如展开、分离、解锁机构等)因其需要实现的重要功能,往往定义为航天器上的关键部件,但其在轨工作时多处于舱外,热空间环境变化剧烈,部件本身承受的温差甚至可达±100 ℃以上。这些舱外关键部件和装置,通常在这样严酷的空间环境下难以正常工作。为了适应在轨的这种极端热环境下的正常工作要求,通常要采取相应的热控措施保证这些机构的在轨温度要求,以提高机构产品的可靠性。
从目前来看,对航天器上电子学仪器热控设计的研究很多,基本均采用传统直接热控的方法,即在电子学仪器本体或周围采用被动或主动热控设计,达到其控制要求。而针对机构及附属设备热设计的研究,国内外相关资料较少,且研究重点大都在机械的热弹变形方面[1-8],或是通过热控涂层等简易控制在一个较宽范围内[9-10]。航天器直接热控设计方法简便、高效,控温直接,温度稳定性也较好。但对于展开机构、解锁机构等运动部件,因其温度敏感的铰链、轴承、电缆等部位因其功能、可靠性和可测试性的要求,直接在这些部位进行热控会导致机构本身的功能受限,工艺上也有较大困难,甚至不可行。如在展开机构上直接实施的热控产品柔性状态会带来钩挂的风险,张紧状态主动加热带等热控产品在地面多次展开试验过程中,大角度的运动也会带来疲劳损伤和断裂的风险。此外,测温元器件布置在运动部件上也会存在损伤的风险。再比如,解锁机构火工品表面出于安全性故障规避的要求,也不能直接进行主动热控实施处理。受限于这些约束,直接热控方法在展开机构热设计中的适用性与通用性就较低,对展开机构的活动部位的周围安全区域开展新型间接热控方法的研究就显得尤为重要。
本文旨在摸索应用于航天器舱外机构活动部件的新型间接热控设计方法,为机构产品活动部件的热控设计提供一种新的思路。
1 展开与解锁机构间接热控设计原理及方法
展开与解锁机构一般可简单分为固定部分、运动部分和关节部分,其中关节和运动部分是实现其功能的执行部分,因此温度要求一般较高。关节部分一般为弹簧、轴承、铰链等,这些部件的表面由于润滑、运动等功能要求,不可直接进行热控包覆和设置测温传感器,直接热控设计受限。而运动部分如采用热控包覆、测温、加热等设计,其工艺上如处于张紧状态,将降低测试过程中的可靠性;如工艺上处于柔性松开状态,又会带来钩挂和干扰对系统造成安全性风险。因此,对于展开与解锁机构的运动部分和关节需要采用间接热控设计的方法。
1.1 设计原理
间接热控设计方法的设计原则是在满足温度控制要求的情况下,确保高可靠性,而且要有良好的工艺性和较高的适应性。因此热设计时尽量避开展开机构的运动部分,而选择在其安全可靠的非运动部位进行热控设计和实施。
如图1所示,当热控的目标点为展开机构的弹簧、轴承、铰链等活动部件时,这些部件上因其运动功能无法直接进行热控实施,而如果在机构运动部件上进行热控设计又容易带来运动过程中的热控产品钩挂和地面测试疲劳的风险。因此,选择在机构上固定区域或相对安全的部位进行热设计和热实施,并在此设计一个间接控制点,通过展开机构各部位间的传热关系计算出间接控制点处与目标点处的温差,由间接控制点温度的调节间接控制目标区域的温度,从而解决展开机构的关节、活动部位等关键部件热控问题。

图1 间接热控设计原理图
1.2 间接热控设计方法
间接热控设计采用如图2所示流程。在确定机构热控指标要求后,要仔细分析热控设计约束,在其关注部位是否可以进行相应的热控设计和实施,如无法直接设计则要考虑间接热控设计的方法。在确定选用间接热控方式后,首先要分析可设计的安全部位,然后在该部位进行间接热控方案设计,并选择间接控制点,接着进行传热分析确定间接控制点与目标点间的传热关系。按此传热关系就可进行相关的数值分析和试验验证,最终确定间接控制点与目标点的温差,并将结果与指标要求进行比对,如满足指标要求即可确定最终的实施方案。如果不满足指标要求,需要重新进行间接方案设计,并进行分析与验证直到满足指标要求。
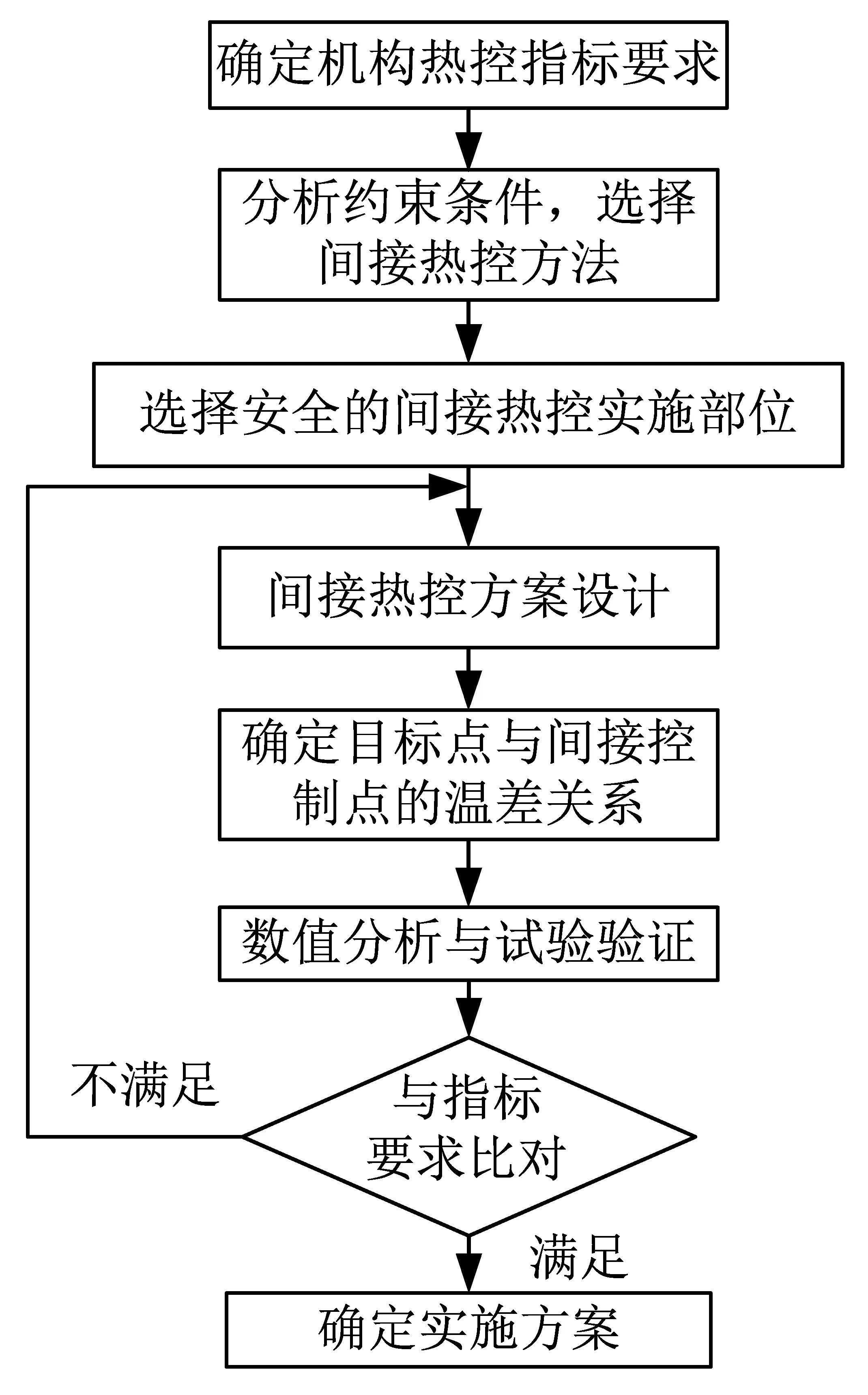
图2 间接热控设计流程
1.3 间接控制点与目标点的温差确定方法
间接控制点与目标的的温差确定是间接热控设计的关键。考虑到机构部件所处的空间热环境,间接控制点与目标点的传热关系只存在辐射、导热以及运动部件间的接触热阻。接触热阻由于表面状态、装配预紧力、热流量等众多影响因素,一般采用经验数据或试验测试结果。在接触热阻直接采用经验值后,根据传热学原理,目标点与间接控制点间的导热和辐射传热量计算如式(1)、(2)所示。
fcond(ΔT)=K1ΔT
(1)
(TH+TC)ΔT
(2)
式中:σ为波尔兹曼常量,δ为导热方向的厚度,qcond、qrad为导热量、辐射热量,λeq为当量导热系数λeq,εeq为当量辐射率,TH、TC为高温和低温对象温度,ΔT为两端温差。

(3)
qrad=σεeqT3ΔT=frad(ΔT)=K2ΔT
(4)
qsum=qcond+qrad=fs(ΔT)=(K1+K2)ΔT
(5)
式中:qcond、qrad、qsum为导热量、辐射热量和总传热量,T为特征常值温度,TH和TC分别表示高温和低温对象,此处指代其中的间接对象和目标对象,ΔT表示两者温差,K1和K2定义为相关恒定比例系数值,此处可分别表征为导热热阻和辐射热阻的倒数。
通过理论分析,在一定温区范围下,部件间的温差与连续的总传热量对应存在着线性函数关系,再结合目标点的能量平衡方程式(6),即可通过计算分析及地面试验确定在机构工作的温区内间接控温对象与目标控温对象的传热温差关系。
qsi+qpj-qsum=0
(6)
式中:qsi位目标点的吸收外热流、qpj为目标点的内热源(含主动功耗)。
展开机构在轨工作时,热控可按此温差来控制间接控制点的相应温度,实现目标对象温度的间接控制,从而在解决展开机构、解锁机构等运动部件关键部位的热控要求的同时还不会带来功能上的损失和工艺上的风险。
2 间接热控设计实例
利用结构部件间传热温差的间接控温方法旨在为针对有特殊控温需求的活动机构部件热控设计提供新思路,使卫星机构热控设计不再依赖于目标对象本体表面,提高热设计的可控性、普适性、独立性,达到预期可调的控温要求和效果。某卫星的展开与解锁机构的控温区无法进行热实施,因此热设计采用了间接热控的方法,并针对该间接热控设计进行了验证。
2.1 展开与解锁机构设计要求与约束
某卫星上配置有多套机构产品,其中的展开机构(含两组高频电缆)、锁紧释放机构均有较高的热控要求。展开机构及其附属高频电缆的温度对机构的稳定展开影响很大,温度过高或过低都会导致稳定度差或展不开的故障,以至于任务失败。这些机构产品在综合考虑到其特性要求及地面测试的可行性提出了表1的要求,并要求热控方案在满足温度要求的同时避免安全性的风险和高可靠性的要求。
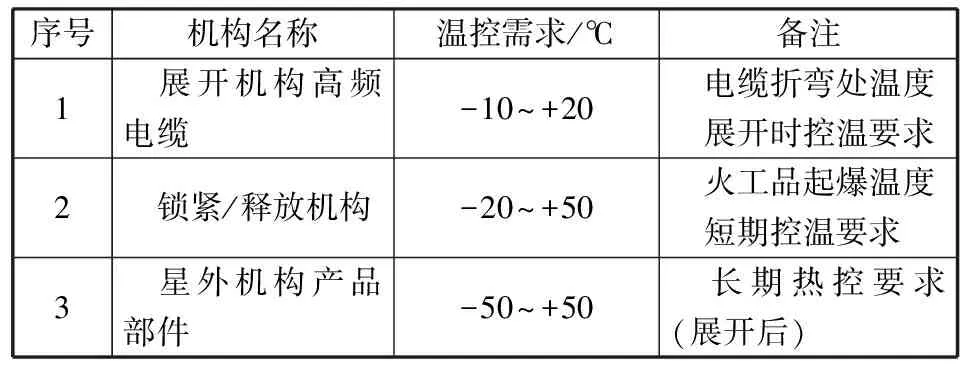
表1 机构产品热控要求表
2.2 展开机构间接热控设计
针对展开机构及高频电缆控温的需求及上述设计要求以及展开时的运动约束,经仿真分析,若采用简单热控方案,电缆在轨的温度将会达到-60 ℃以下,无法满足任务要求。如在活动部位直接设计,热控产品会导致机构驱动力矩无法保障,而且热控产品在运动过程中的可靠性不高,综合考虑后选用了间接主动热控设计的方法。如图3所示,图3中折弯区域为运动部分,即需要保证温度的目标区,其余部分为固定区。
展开机构的间接热控设计是在机构上的高频电缆的固定端设计主动加热带,同时设置间接控制点,然后外部包覆多层隔热组件(不干涉机构展开)。而目标区域的活动部分仅包覆热控多层。利用间接热控方法,通过计算与地面试验确定间接控制点与目标点活动部分的传热温差关系,然后通过控制间接控制点来间接控制活动部分的温度。展开机构的结构部分均包覆多层隔热组件,为高频电缆提供相对稳定的温度边界。
2.3 锁紧释放间接机构热控设计
解锁机构的温度指标要求保障火工品的温度,而且安全性的原因不允许在火工品上直接热控设计,因此也采用了间接主动热控设计的方法。如图4所示,在锁紧装置支架处设计一路主动加热带间接控制火工品处的目标点温度,同时外部包覆多层隔热材料隔离外热流。图5为热实施后的效果图。
图4 锁紧机构间接控温原理图

图5 锁紧机构热装实施状态
考虑到该机构钛合金支架的导热性以及多层包覆后机构整体温度差异性较小,通过近似计算比较式(1)、(2)结果的数量级大小,支架与火工品间的辐射传热量远小于导热的传热量可忽略不计,因此将该机构内部传热的计算可将其视为一个三维非稳态无内热源的导热问题,通过其能量平衡方程和传热方程即可得出在稳态条件下支架部分温度和火工品的传热温差关系,同时可计算出两者间的温差,从而可通过控制支架温度间接控制火工品温度。
3 数值仿真分析与在轨验证
3.1 展开与解锁机构数值仿真
根据间接热控方法设计的热控展开机构热控方案,利用热分析软件建立了仿真分析模型进行数值分析,以验证该设计方法的有效性。仿真建模时,星上布局均按照产品的实际状态进行建模;电缆固定部分简化为直线型,电缆折弯部分简化为规则圆弧,锁紧装置不规则楔形简化为表面积大小相等的规则六面体。
分析工况按照飞行程序设置,发射初期展开装置及锁紧/释放装置均处于锁定状态,数值计算出电缆和锁紧装置处于闭环加热回路作用下的温度,图6为两个机构在稳态工况下的间接控制点与目标点的温度分布。
展开机构的电缆数值结果稳态工况表明,由于电缆材料本身导热性能较差,整体轴向会有较大的温度梯度,温度均匀性偏低,电缆折弯处目标点与间接控制点的温差稳定在15~20 ℃。锁紧装置闭环控温效果相对较好,整体温度场分布相对均匀,火工品目标点与间接支架处热敏控制点的温差稳定在4~10 ℃。

图6 电缆和锁紧装置温度
图7~图8为展开机构电缆和锁紧装置的间接控制点与目标温度的瞬态温度曲线(按任务飞行6圈)。展开机构电缆上、下目标拐角处温度接近,且达到稳定后最高温度约为6 ℃,最低温度约为-5 ℃;锁紧装置火工品处的最高温度约为14 ℃,最低温度约为8 ℃,均满足设计指标要求。
图7 电缆拐弯处温度分布曲线(目标点和间接控制点)Fig.7 Temperature results of the cable (target temperature and indirect measurement point)
图8 锁紧机构温度分布曲线(目标点和间接控制点)Fig.8 Temperature results of locking mechanism (target temperature and indirect measurement point)
3.2 地面温差测试
为了进一步验证间接控制点与目标点的温差关系,整星热试验中在展开机构的目标点处设置了测试温度传感器测温,间接测点(即间接控制点的温度测量)则由星上热敏采集并闭环控温。图9试验结果显示:电缆折弯处温度平衡后目标点与间接控制点温差稳定在15~20 ℃。与之前仿真的温差结果比对的一致性良好,从而验证了在电缆折弯两侧间接控温可以满足目标折弯处0 ℃左右的折弯力矩的温度要求。同样解锁机构也采用相应的控温措施,图10试验结果显示:支架间接控制点与目标点温差温度在5~10 ℃。也与仿真的温差结果吻合,从而也验证了通过间接控制支架温度能够满足目标火工品处起爆温度要求。
热试验结果表明:热设计合理有效,满足热控指标要求,测试出的温差可作为在轨控温目标设置的依据。
图9 热真空期间电缆温度对比(目标点和间接控制点)Fig.9 Temperature comparison of high frequency cables during thermal vacuum
图10 热真空解锁机构温度比对(目标点和间接控制点)Fig.10 Temperature comparison of locking mechanism during thermal vacuum
3.3 在轨飞行验证
按仿真及试验结果,展开机构的间接控制点温度设置为30 ℃,锁紧释放机构间接控制点温度设置为15 ℃,卫星入轨运行后,根据飞行程序,展开机构按要求在轨顺利展开。图11所示为在轨飞行时展开时刻前后的展开机构高频电缆温度控制情况,在轨温度与试验及仿真结果吻合较好。图12所示为锁紧释放机构顺利解锁时的间接控制点温度。卫星及各活动机构部件在轨遥测温度数据结果表明:各部件工作温度范围均满足热控的指标要求,展开及解锁过程均满足任务需求,进而证明了间接热控方法的正确性及机构热控设计的有效性与可靠性。
图11 电缆主动段及在轨展开过程温度控制情况Fig.11 Thermal control of high frequency cables during active orbit and deployment process
图12 解锁机构主动段及在轨展开过程温度控制情况Fig.12 Thermal control of locking mechanism during active orbit and deployment process
4 结束语
本文针对展开机构上关节、运动部位直接热控的功能局限性和安全性问题,设计了一种间接热控制的方法。经数值分析及地面试验,结果均表明间接热控方法能满足机构产品热控指标要求。在轨遥测结果显示间接控制能满足机构产品的温度指标要求,展开机构的多次顺利展开和释放也验证了热设计的有效性与可靠性。在本文热控设计基础上,可通过改进热控多层、加热带的包覆工艺以及间接控制点位置优化来进一步提高间接控制方法的目标点温度精度。但需注意的是设计间接控制点与目标点温差时,要考虑具体工作的温区。本文的热控设计思路及方法可为各类卫星上展开机构或者活动部件的热控设计提供参考,使卫星机构热控设计不再依赖于目标对象本体,提高热设计的可控性、普适性、独立性,达到预期可调的控温要求和效果。