航天器有限时间自适应姿态跟踪容错控制
2019-03-06高直王媛媛邵星
高直,王媛媛,邵星
(盐城工学院 信息工程学院,盐城 224051)
0 引 言
航天器在轨运行时,由于长时间工作在强辐射和高低温等恶劣环境中,各种故障伴随而生,其中执行机构和敏感器发生故障最为常见[1-4]。近年来,针对航天器执行机构故障的容错控制问题已成为研究热点之一。Hu Q L等[5]针对执行机构部分效能损失的情况,设计了一种自适应反步控制策略,使得航天器在外界干扰的环境中达到姿态稳定;于彦波等[6]针对航天器姿态控制过程中存在执行器故障、控制受限及外部干扰等约束问题,提出了一种能有效保证系统稳定性的积分滑模容错控制算法;李涛等[7]针对挠性航天器在轨运行时受到的外部干扰,输入时滞以及执行机构部分失效问题,提出了一种基于不确定参数的鲁棒H∞容错控制方法;Han Y等[8]在不考虑外界干扰的情况下,针对执行机构功能衰退故障设计了一种自适应容错姿态控制逻辑。
由于太空环境的复杂性,航天器不可避免的会受到太阳光压、地磁和重力梯度等干扰力矩的持续影响[9]。同时,由于太阳帆板运动、燃料消耗和液体晃动,航天器的惯量会产生未知时变变化,导致无法准确获知航天器惯量参数信息[10-11]。此外,随着航天任务需求的增长,要求航天器快速稳定且具有较高控制精度,有限时间控制框架下的姿态控制方法能够保证系统具有快速收敛和高精度性能,更具理论和工程意义[12-14]。韩治国等[14]假设惯量标称矩阵为已知常数,针对存在外部干扰、转动惯量不确定性及执行机构故障的航天器提出了一种非奇异终端滑模的有限时间收敛控制方案。上述容错控制策略仅考虑惯量时变、执行机构性能损失和外界干扰等其中某些情况下的刚体航天器姿态容错控制问题。
本文针对非刚体航天器在轨运行时,执行机构部分失效或部分执行机构完全失效、受到惯量未知时变性以及外界持续干扰等,设计一种使系统跟踪误差能够快速收敛的有限时间自适应姿态跟踪容错控制律,并进行仿真验证和对比。
1 问题描述
1.1 航天器姿态运动及动力学误差系统模型
具有执行机构故障的非刚体航天器姿态运动学和动力学误差方程为[15]
(1)
(2)
BEτ+d
(3)


1.2 控制目标
针对受未知时变外界干扰的非刚体航天器在轨运行中存在未知时变惯量和执行机构故障等问题,提出一种自适应有限时间姿态跟踪容错控制,使得航天器姿态及角速度误差系统一致有界稳定。
2 控制律设计及稳定性分析
本文利用有限时间的思想设计非刚体航天器有限时间自适应姿态跟踪容错控制器,控制原理如图1所示。
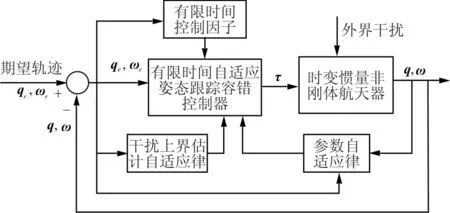
图1 有限时间自适应姿态跟踪容错控制原理
首先,定义一个误差辅助变量S
S=βqe+ωe
(4)
式中:β是一个正实数。
对(4)式求导可得
(5)
(6)
由于外界干扰、惯量及其一阶导数有界[11,18],得
‖φ‖≤c0+c1‖ω‖+c2‖ω‖2≤cφ
(7)
式中:φ=1+‖ω‖+‖ω‖2,c0,c1,c2和c为未知正实数。
其次,根据图1所示的控制原理设计有限时间自适应姿态跟踪容错控制器
τ= -k1BTS-k2BTsigα(S)-
(8)
(9)
(10)
(11)

所设计控制器(式(8)~式(10))不包含执行机构故障、干扰及不确定性的任何先验信息,即不需要执行机构的故障信息或在线识别以及惯量和外界干扰的最大值信息。
下文给出系统稳定性分析所用到的相关引理。
引理1[16]对于任意实数x和非零实数y,都有下面不等式成立:
式中:ρ>0,ρmin满足ρmin=x*(1-tanhx*),x*满足方程e-2x*+1-2x*=0。
引理2[17]针对xi∈R,(i=1,2,…,n)和实数α3∈(0,1],则有下列不等式成立:

其中,p∈(0,1),θ,ρ∈R+,则非线性自治系统是实际有限时间稳定的。
定理考虑存在未知时变惯量不确定性、持续外界干扰以及执行器故障的非刚体航天器,若采用控制律式(8)和自适应律(式(9)~式(11)),则姿态跟踪误差系统(式(1)~式(3))是有限时间稳定的。
证明:选取Lyapunov函数为
(12)
式中:ε是BEBT的最小特征值。
对Lyapunov函数(12)求导并由式(1)~式(6)得
(13)
把控制律(式(8))及自适应律(式(9)~式(11))代入式(13)得
(14)
(15)
通过引理1可以得出式(16),变形过程见文献[19]。
(16)
进而可以推导出
(17)
同时
(18)
把式(16)~式(18)代入式(15),且根据引理2可得
(19)

由引理3可知,航天器姿态跟踪误差系统是实际有限时间稳定的。
由式(19)可以得出:k1、k2及γ2越大,γ1及γ4越小,可使航天器姿态及角速度跟踪误差越小,即控制精度越高。此外,从系统稳定性分析中可以看出,文中所设计控制器是冗余容错控制器,执行机构衰退或完全失效之后,执行机构产生的综合力矩要确保有足够的控制力作用在3轴本体坐标系方向上使得航天器能够完成姿态跟踪,所以完全失效的执行机构最多为σ-3。
3 仿真验证与对比
为了验证所提自适应有限时间姿态跟踪容错控制方法的有效性,在此给出仿真参数进行仿真验证。
3.1 非刚体航天器仿真验证

表1 惯量矩阵和初始姿态
执行器效率矩阵为
E= diag{0.7+0.2sint,0.4+0.4cos[π×sign(12-t)],0.6+0.2sin(t),0.3+0.3cos[π×sign(13-t)],
0.7+0.2cos(t),0.6+0.2sin(t)}
(20)
从执行器效率矩阵E可以看出,当t>12时,0.4+0.4cos[π×sign(12-t)]=0;当t>13时,0.3+0.3cos[π×sign(13-t)]=0;由航天器动力学系统方程(3)可以得出,第2个和第4个执行器分别在12 s和13 s后完全失效,其他执行器则有不同程度的衰退老化。
执行器分布矩阵为
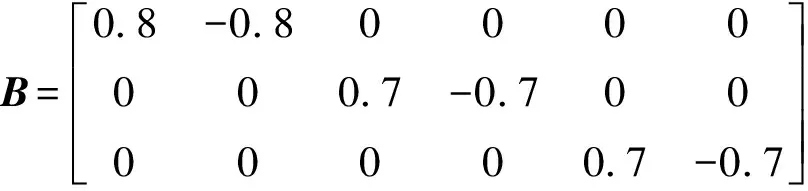

非刚体航天器姿态及角速度跟踪误差曲线如图2~图3所示,控制力矩曲线如图4所示。
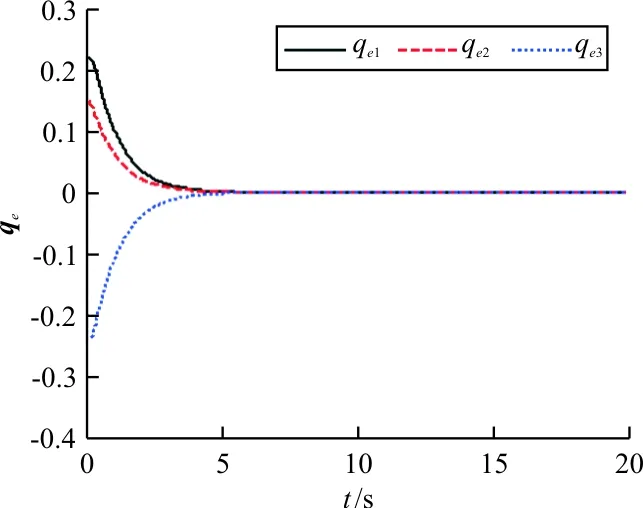
图2 姿态跟踪误差曲线
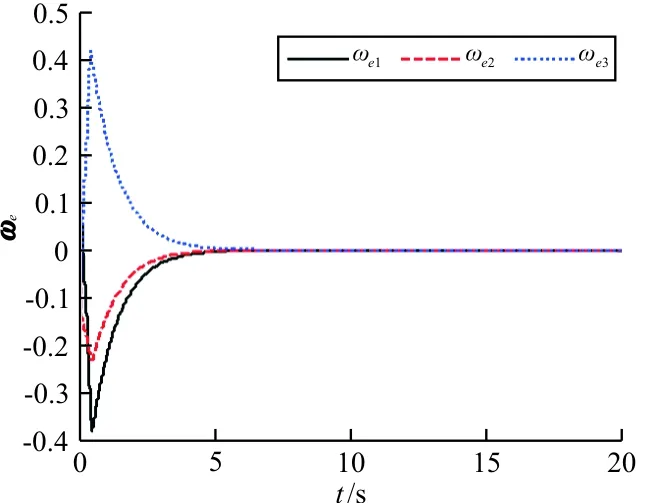
图3 角速度跟踪误差曲线
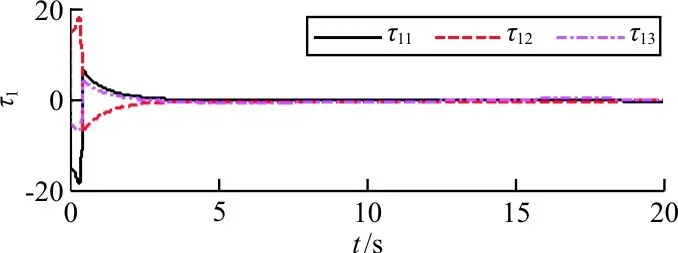
(a) 执行机构1,2,3
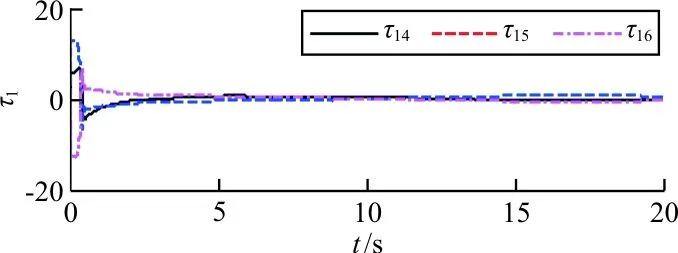
(b) 执行机构4,5,6
从图2~图3可以看出:在控制律(式(8))及自适应律(式(9)~式(11))作用下,尽管航天器受到执行机构衰退故障、部分执行机构完全失效故障、未知时变惯量不确定性及外界干扰影响,仍能很好地完成姿态跟踪任务,跟踪误差最终趋于零点附近一个很小的邻域内,控制器具有很好的控制效果。
从图4可以看出:执行机构具有很好的控制性能,不存在抖振等问题。
3.2 刚体航天器仿真对比
为了说明文中所提方法适应于刚体航天器且相比已有文献中控制方法的优越性,在控制参数相同的条件下与文献[20]进行仿真对比。
为了验证控制器对不同干扰下的鲁棒性,外界干扰选取不同于3.1节的形式,外界干扰选取为τd=[0.1+0.2sin(t),0.4+0.5cos(t),0.2+0.3cos(t)]T。惯量矩阵、执行器效率矩阵、分布矩阵及期望轨迹与3.1节相同。文献[20]控制器参数选取与所提控制器参数值相同,即k0=k1=10,β=2,σ1=γ1=0.01,σ2=γ2=60,μ=γ4=0.1。由所提方法和文献[20]自适应姿态容错方法所产生的曲线分别用“Proposed”和“Comparison”标注。姿态误差范数和角速度误差范数曲线如图5~图6所示。
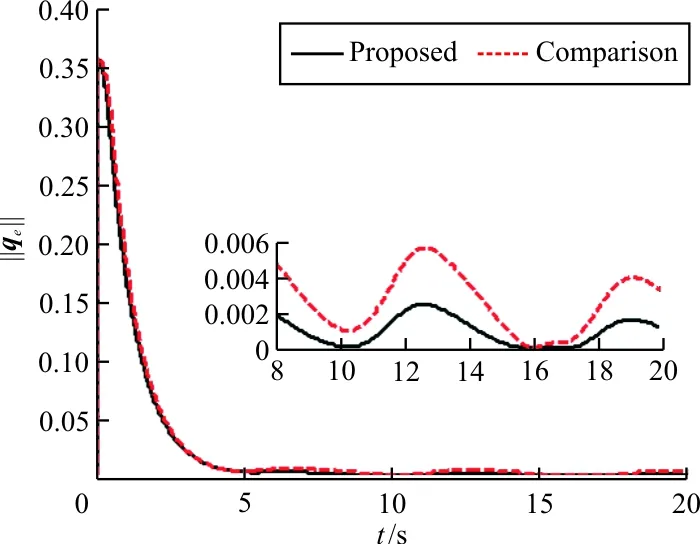
图5 姿态误差范数‖qe‖曲线
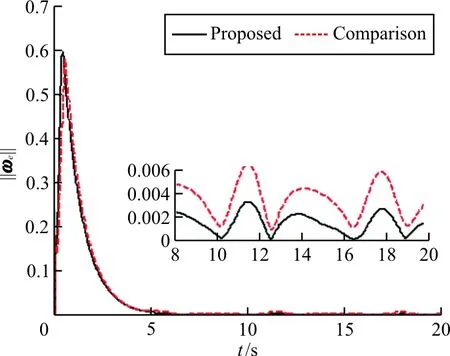
图6 角速度误差范数‖ωε‖变化曲线
从图5~图6可以看出:所提方法具有较高的控制精度和快速收敛性,满足实际工程应用控制需求。
4 结 论
本文以非刚体航天器为研究对象,给出了存在部分执行机构完全失效故障、执行机构部分失效(老化)故障、时变惯量、外部干扰等影响下的航天器有限时间自适应姿态跟踪容错控制方法。所提控制方法能够有效地抑制外界干扰、惯量变化和执行器故障对系统稳定性产生的负面作用。所设计控制器有效、可行,具有良好的鲁棒性和快速收敛性。