倾转旋翼机冗余操纵的舵面分配策略和飞行转换路径分析
2019-03-06马存旺文嘉瑜宋彦国
马存旺,文嘉瑜,宋彦国
(1.中国航天空气动力技术研究院 彩虹无人机科技有限公司,北京 100074)(2.南京航空航天大学 直升机旋翼动力学国家重点实验室,南京 210016)
0 引 言
倾转旋翼机作为一种独特的航空器,通过直升机模式与固定翼模式之间的转换(短舱能够进行-5°~90°倾转),可同时具备直升机的垂直起降能力以及固定翼飞机高速、大航程的优点,有效扩大了飞行器的飞行包线。该类飞行器具有变体、变转速特点,由于短舱的倾转,致使飞行器的气动、动力学、控制等问题非常复杂,稳定性和控制特性会有明显改变,飞行动力学模型也要比其他飞行器更加复杂。国外针对该问题较早进行了研究,例如由 NASA 埃姆斯研究中心和 STI 公司开发的GTRS(Generic Tiltrotor Aircraft Simulation)软件[1-2]应用于倾转旋翼机的设计和飞行力学研究;G.D.Klein[3]在已有的直升机软件基础上,建立了倾转旋翼机直升机模式和固定翼飞机模式的线性状态空间模型,进行稳定性和操纵性分析,但该模型没有考虑旋翼对机翼的气动干扰问题,也没有对倾转过渡模式进行研究;M.Miller等[4]针对 V22 倾转旋翼机建立飞行动力学模型,进行了倾转旋翼飞行器各个飞行模式的稳定飞行计算。国内,沙虹伟等[5-6]通过理论建模方法得到了倾转旋翼样机不同飞行模式下的线性化模型,在考虑旋翼/旋翼与旋翼/机身干扰情况下总结出了倾转旋翼机飞行动力学特性,同时采用特征结构配置和反馈控制技术进行了倾转旋翼机姿态控制器设计。
由于过渡过程中直升机和固定翼飞机的两套操纵方式加上发动机短舱的倾转共同参与此过程的操纵,此时必须考虑过渡过程的合理速度范围,保证旋翼和机翼的升力满足飞行的需要,同时还必须保证三种飞行模式下的操纵量和机体姿态的变化是连续的,导致倾转旋翼机的过渡飞行过程是其最重要、最复杂、最不安全的飞行模式。J.Jang[7]采用了V.E.Gavito对故障系统重构的方法[8]对飞机纵向故障面进行特征值和特征向量配置进行设计,实现了对飞行器的冗余操纵;Marc Gervais[9]、夏青元等[10-11]和吉国明等[12]考虑了倾转旋翼机存在多冗余操纵面,分析其机理,期望可以通过改变控制律,利用其他操纵面来实现故障操纵面的功能,从而提高倾转旋翼机的安全性;宋彦国等[13-15]对倾转旋翼机验证机进行飞行动力学建模,并对冗余操纵面的飞行控制技术与全模式试飞试验技术开展了相关研究,实现了小型无人倾转旋翼机全模式的飞行试验。
本文基于已建立的全量非线性倾转旋翼机飞行动力学模型,对不同飞行状态下的非线性模型进行配平计算、模型线化,并重点对操纵功效进行分析,并以操纵功效分析结果为依据,给出各飞行模式下的舵面分配策略;在此基础上,对倾转旋翼机在直升机模式下起飞,然后加速进入过渡模式,最后进入飞机模式的策略进行配平计算分析,给出三条全模式飞行转换路径,期望能为基于冗余操纵面进行自适应控制律重构设计提供参考。
1 倾转旋翼机飞行动力学建模
1.1 六自由度飞行动力学方程
考察某小型无人倾转旋翼机,长1.8 m,宽1.7 m,高0.6 m,旋翼直径1.2 m,其坐标系定义如图1所示。

图1 倾转旋翼机坐标系定义
在机体坐标系下,倾转旋翼机的外力和外力矩为
(1)
重力表示为
(2)
速度微分方程为
(3)
本文所研究的倾转旋翼机关于XB-ZB平面对称,因而忽略转动惯量Ixy和Iyz的影响,得到角速度微分方程:
(4)
三个欧拉角(滚转角φ,俯仰角θ,偏航角Ψ)来描述其相对于地面坐标系的姿态,得到欧拉角与角速度的关系为
(5)
式(1)~式(5)中包括左(右)旋翼、机翼、左(右)短舱、机身、平尾、垂尾各模型,详细过程及结果可参阅文献[5,13,15]。
当计算出合外力和合外力矩时,根据六自由度动力学方程即可求得其运动状态。
1.2 非线性飞行动力学模型分析
上文描述的非线性飞行动力学模型如图2所示,包括操纵输入模块、气动力计算模块及输出状态模块。
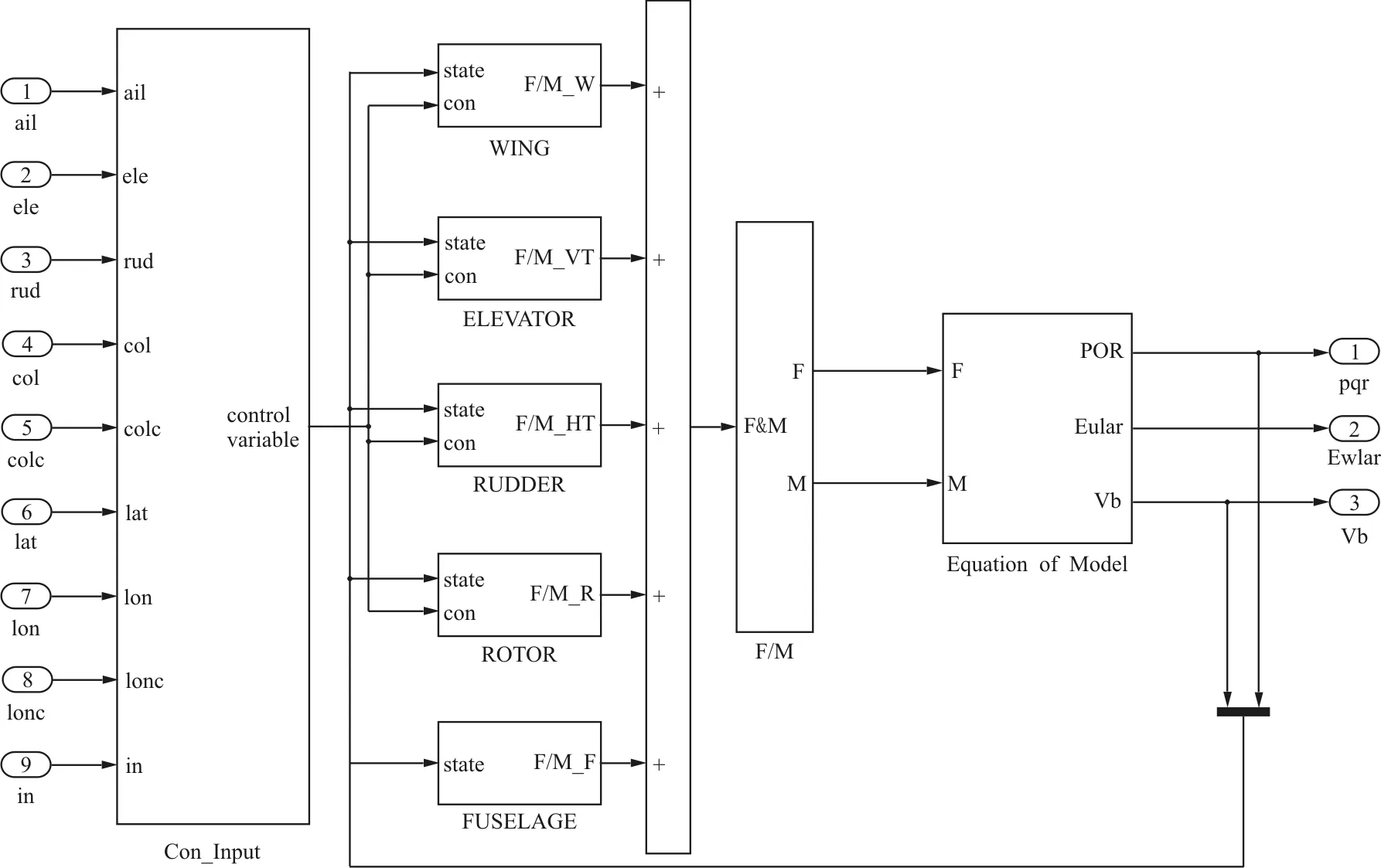
图2 倾转旋翼机非线性飞行动力学模型
(1) 操纵输入模块:包括副翼操纵δa、升降舵δe、方向舵δr、总距δcol、总距差动δcolc、横向周期变距δlat、纵向周期变距δlon、纵向周期变距差动δlonc以及短舱倾角δnac。
(2) 气动力计算模块:包括机翼、旋翼、机身、平尾、垂尾以及短舱的气动力及力矩,并计入飞机自身重量,一起作为动力学方程输入量。
(3) 输出状态模块:包括体轴系下的速度(U,V,W),角速度(p,q,r),姿态角(φ,θ,Ψ)和位置(xD,yD,zD)。
在过渡阶段中,前飞速度与短舱前倾角构成安全飞行走廊,走廊下边界机翼升力限制了最小飞行速度,上边界由桨叶失速、功率等因素限制了最大前飞速度。结合配平计算得出前飞速度与短舱前倾角之间的匹配关系,确定出某小型无人倾转旋翼机过渡阶段的速度范围(15~25 m/s)。
从悬停状态开始,逐渐加速飞行,当速度达到15 m/s左右时短舱开始倾转,到倾转旋翼机从直升机模式过渡到固定翼模式,速度达到25 m/s,整个过渡阶段是一个加速过程,进入固定翼模式继续加速飞行,最大速度为40 m/s。
通过选取一系列配平点,计算在舵面独立控制的操纵方式下,单位操纵面位移所引起的气动力矩改变量,即可考察倾转旋翼机的操纵功效,结果如图3~图5所示。
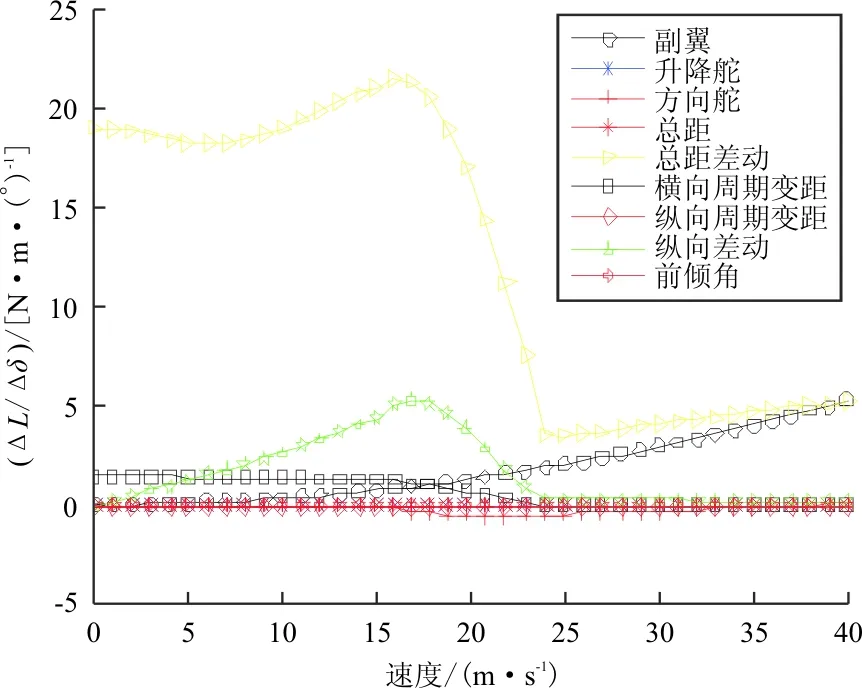
图3 各操纵面滚转力矩功效

图4 各操纵面俯仰力矩功效
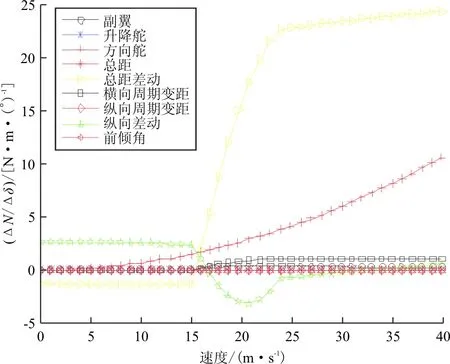
图5 各操纵面偏航力矩功效
从图3~图5可以看出:不同操纵面在一定条件下能提供相同的操纵功效,具体分析如下:
(1) 直升机模式(速度0~15 m/s)
①对于滚转力矩,从图3可以看出:总距差动引起的滚转力矩功效最大,原因是桨毂中心距离倾转旋翼机中心距离较长,随着前飞速度的增加,总距差动的滚转力矩功效变化不大;纵向周期变距差动具有一定的滚转力矩功效,且随前飞速度的增大而逐渐增大;副翼产生的滚转力矩功效也随着前飞速度的增加而逐渐增大;横向周期变距的滚转力矩功效基本不受前飞速度的影响。
②对于俯仰力矩,从图4可以看出:纵向周期变距产生的俯仰力矩功效最大;随前飞速度增加,升降舵的俯仰力矩功效逐渐体现出来;总距的俯仰力矩功效且随着前飞速度的增加而逐渐增大。
③对于偏航力矩,从图5可以看出:随前飞速度的增加,方向舵逐渐产生偏航力矩功效;纵向差动和总距差动都具有一定的偏航力矩功效且不随前飞速度增大而改变。
(2) 过渡模式(15~25 m/s)
①对于滚转力矩,从图3可以看出:随前飞速度的增加(短舱逐渐倾转),总距差动产生的滚转力矩迅速下降,总距差动由控制滚转通道逐渐过渡向控制航向通道;在倾转过渡前期,纵向差动的滚转力矩继续随前飞速度而增大,到了倾转过渡中后期,纵向差动的滚转力矩功效逐渐下降,其原因与总距差动滚转力矩功效随短舱前倾而下降相同;进入飞机模式后纵向差动滚转力矩功效基本为零;横向周期变距的滚转力矩功效随短舱前倾而逐渐减小;副翼的滚转力矩功效随前飞速度增加而继续增大。
②对于俯仰力矩,从图4可以看出:纵向周期变距的俯仰力矩功效随着速度增加、短舱前倾而逐渐下降;副翼的滚转力矩功效随着前飞速度增加而逐渐增大。
③对于偏航力矩,从图5可以看出:由于短舱前倾,总距差动的偏航力矩功效迅速上升;方向舵的偏航力矩功效也随着前飞速度增加而增大;纵向差动的俯仰力矩功效随短舱前倾而逐渐减小,下降到零之后开始产生负功效并逐渐增大,达到极大值后又逐渐下降,原因是纵向差动产生偏航力矩的主要贡献为两侧旋翼气动力在机体x轴方向上的分量,当施加纵向差动后,前倒侧旋翼拉力下降,使x方向上的分量有所减小,而前倒角又使得拉力方向靠近机体x轴从而使得x轴上的分量有所增大,前述减小量和增大量在短舱倾转到一定角度时恰好抵消,后倒侧旋翼过程与前倒侧旋翼刚好相反。
(3) 飞机模式(25~40 m/s)
①对于滚转力矩,从图3可以看出:总距差动的滚转力矩功效基本不随前飞速度变化;横向周期变距不再有滚转力矩功效。纵向差动的滚转力矩功效很小,这是由于在飞机模式下两副旋翼上的拉力均较小。
②对于俯仰力矩,从图4可以看出:纵向周期变距的俯仰力矩功效基本不随前飞速度变化;升降舵的俯仰力矩功效随前飞速度逐渐增大并占主导地位。
③对于偏航力矩,从图5可以看出:随着前飞速度增加,方向舵的偏航力矩功效逐渐增大,总距差动在飞机模式下会产生很大的偏航力矩功效;横向周期变距的偏航力矩功效较小且不随前飞速度变化。
2 舵面分配策略
2.1 操纵方式
为了实现对倾转旋翼机的有效操纵,其舵面分配如下:
(1) 直升机模式下,总距同步操纵实现垂向运动,纵向周期变距实现纵向运动,总距差动实现横滚运动,纵向周期变距差动实现航向操纵。
(2) 过渡模式下,随着短舱不断倾转,横向周期变距从控制横滚运动向航向运动过渡,纵向周期变距差动从控制航向运动向横滚运动过渡;过渡模式后期,总距差动的横向/航向通道间耦合不断增强,故在倾转过渡模式选择横向周期变距和副翼共同控制横向通道。
(3) 飞机模式下,总距同步对前飞速度进行控制,升降舵实现纵向运动,副翼实现横滚运动,方向舵实现航向操纵。
不同飞行模式下各通道的舵面分配如表1所示。

表1 不同飞行模式下各通道的舵面分配
2.2 舵面分配权重系数
以操纵功效分析结果为依据,在确定各飞行模式下的操纵方式之后,设计各飞行模式下的操纵分配策略,完成整个过渡阶段。
定义四个通道的操纵输入为
U=[Ufwd/vertUlatUlonUhead]T
(6)
式中:Ufwd/vert为前向/垂向速度通道操纵输入;Ulat为横向通道操纵输入;Ulon为纵向通道操纵输入;Uhead为航向通道操纵输入。
进而定义
(7)
(8)
其中,矩阵K为各通道操纵分配权重系数,根据不同飞行模态改变K中的非零系数,从而完成飞行模态的转换。
(1) 在直升机模式下,选取系数矩阵K为

即
(9)
此时倾转旋翼机的操纵方式与横列式直升机相同,即前向/垂向速度通道、横向、纵向和航向通道分别由总距、总距差动、纵向周期变距和纵向周期变距差动进行控制。
在飞机模式下,倾转旋翼机的操纵方式与固定翼螺旋桨飞机相同,此时,将系数矩阵K选取为

即
(10)
(2) 在飞机模式下,前向/垂向速度通道、横向通道、纵向通道和航向通道分别由总距、副翼、升降舵和方向舵进行控制。
(3) 在倾转过渡模式下,将系数矩阵K选取为
(11)
即按照短舱前倾角的正余弦函数平滑地过渡各个通道的操纵输入,使得从直升机模式转换到飞机模式的过程中,直升机操纵逐渐退出各通道的控制,飞机舵面逐渐加入各通道的控制。
从矩阵(11)可以看出:在倾转过渡模式,总距操纵对前向/垂向速度通道进行控制;随着旋翼短舱的倾转,副翼、升降舵和方向舵的操纵功效逐渐增加,而总距差动操纵由控制横向通道逐渐转换至航向通道,纵向周期变距控制纵向通道的操纵功效逐渐下降,纵向周期变距差动操纵由控制航向通道逐渐转换至控制横向通道且功效逐渐下降。因而选择上述过渡模式分配策略。
3 飞行转换路径
3.1 非线性模型配平
在分析全模式飞行路径时,需要用到系统平衡点,因而需要对倾转旋翼机数学模型进行配平计算,以确定其在不同飞行路径下飞行的速度、姿态角以及操控量的关系。直升机模式和固定翼模式的配平与传统直升机和固定翼飞机类似。倾转过渡模式下的配平分析也是确保飞行器处于平衡状态,作用于飞行器上的力和力矩等于0。
飞行器飞行动力学方程组可表示如下:
(12)
式中:x为状态变量,包括机体坐标系下三轴速度(U,V,W),角速度(p,q,r),姿态角(φ,θ,Ψ);u为操纵变量,包括δa、δe、δr、δcol、δcolc、δlat、δlon、δlonc以及δnac;t为时间变量。
从数学角度讲,配平计算的任务就是要找使系统状态导数为0的点,即
f(x0,u0)=0
(13)
式中:x0和u0为飞行器在稳定飞行中状态量和操纵量的配平值。
本文利用MATLAB中的trim函数对飞行器非线性模型进行配平计算。在配平计算过程中,首先,得到机体前飞速度与不同飞行模式之间的对应关系,因此应该充分考虑飞行器在不同飞行模式,特别是倾转过渡模式下的合理速度范围;其次,精细规划旋翼轴倾转角的变化过程,使得旋翼和机翼产生的气动力能够满足定常飞行的需要;最后,保证各个飞行模式下飞行器状态量和操纵量的变化是连续的。
3.2 转换路径
倾转旋翼机的多个不同操纵面在一定条件下具有相同的操纵功效,且从直升机模式进入过渡模式以及从过渡模式到飞机模式有很多切入点。因此,倾转旋翼机在整个全模式范围内有多条飞行转化路径。下文针对倾转旋翼机在直升机模式下起飞,然后加速飞行进入过渡模式,最后进入飞机模式的策略进行配平计算分析。
3.2.1 转换路径1
全模式仅用旋翼对倾转旋翼机进行控制,固定翼模式的舵面保持不变。在此条件下,配平计算结果如图6~图8所示。
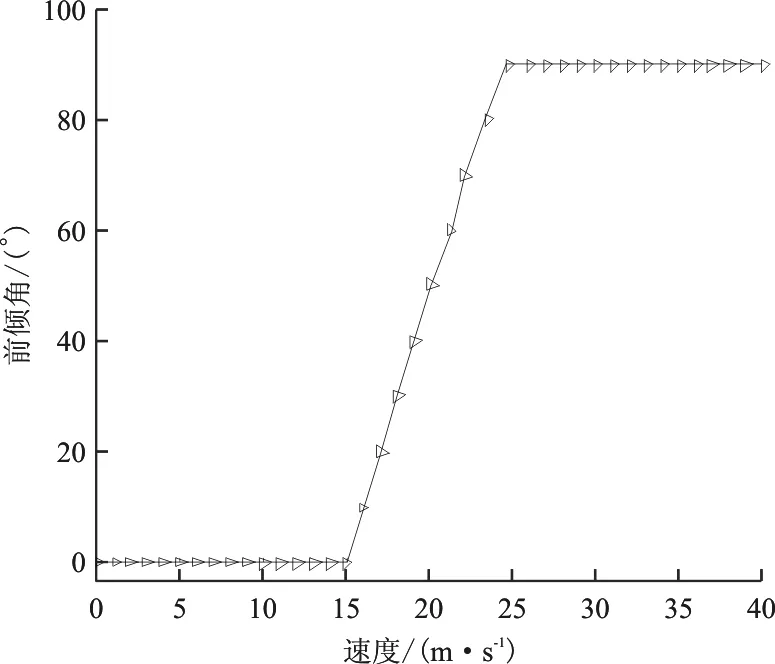
图6 前倾角随速度变化曲线(路径1)
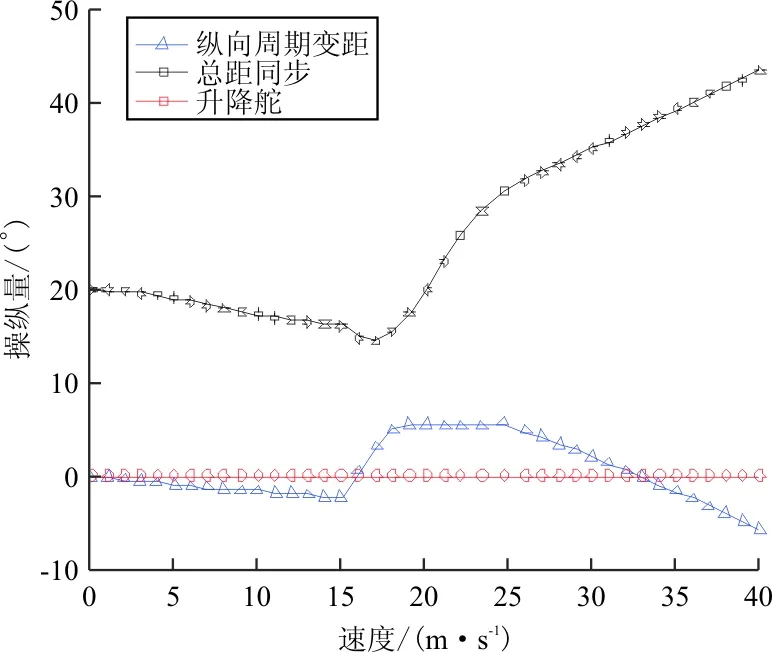
图7 操纵量随速度变化曲线(路径1)
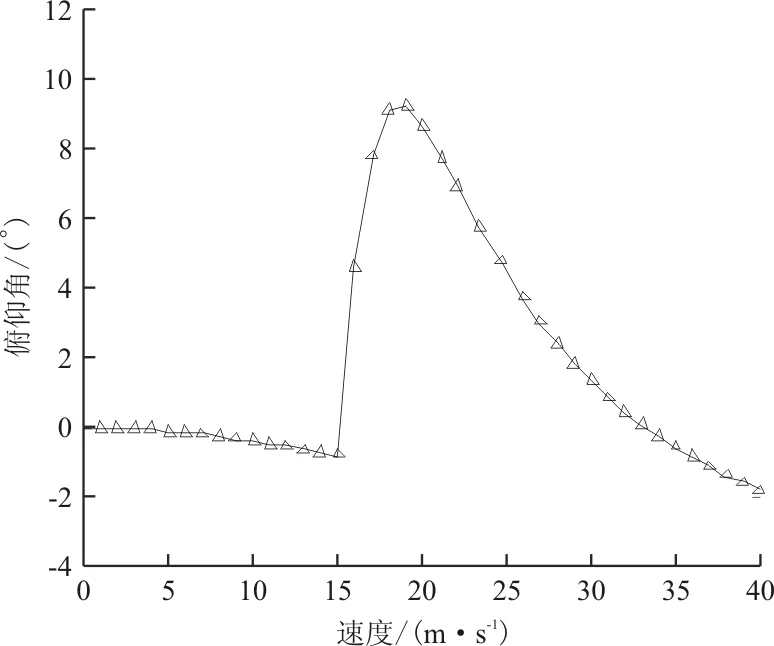
图8 俯仰角随速度变化曲线(路径1)
(1) 直升机模式
从图6可以看出:直升机模式的前飞速度为 0~15 m/s,在该飞行模式下,飞机舵面不参与操纵控制。从图7可以看出:随前飞速度的增加,旋翼总距同步操纵量逐渐减小,纵向周期变距逐渐增大。总距同步操纵的变化是由于诱导功率随前飞速度的增加而减小,导致旋翼的需用功率减小,而速度继续增大时,机翼产生的升力也会逐渐增大,从而使得总距同步操纵量减小。纵向周期变距的变化是由于直升机模式下随着前飞速度不断增加,旋翼产生的前向力也要不断增大的原因所致,从而使机体逐渐低头,俯仰角逐渐负向增大,如图8所示。
(2) 过渡模式
在倾转过渡模式时,倾转旋翼机在桨轴前倾角由0逐渐增大到90°的过程中为倾转过渡飞行模式,其对应的前飞速度为15~25 m/s。在该模式下,随着旋翼轴倾转角的增大,机体前飞速度逐渐增大,旋翼总距同步操纵逐渐增加,这是因为桨轴倾转后旋翼的轴向来流增大,导致桨叶有效迎角减小,为了使旋翼产生更大的有效拉力和前向力分量,需要增加旋翼总距。在倾转过渡模式配平过程中,期望倾转旋翼机能以正的俯仰姿态进行定直飞行,使机翼可产生更大的升力,用来消除由于旋翼短舱前倾角倾转使总距产生的垂向拉力减小的影响,从而保持飞机不掉高度,俯仰角变化如图8所示。整个倾转过渡模式,倾转旋翼机俯仰运动均由纵向周期变距控制,俯仰角姿态在刚刚倾转时变化较大,原因主要是随着短舱前倾,旋翼拉力在Z负方向的分量变化不大,但产生了一个在X向的力臂,正的俯仰力矩的出现导致倾转旋翼机抬头,随着短舱继续前倾,旋翼拉力在X向的分量逐渐增大,在Z负方向的分量逐渐减小,因此产生的俯仰力矩逐渐减小,俯仰角也逐渐减小。从图6~图8可以看出:在倾转过渡模式下配平计算得到的倾转旋翼机各状态量和操纵量变化相对平稳,没有出现较大的跳跃运动,符合实际飞行操纵习惯,表明所选择的过渡飞行路径是可行的。
(3) 飞行模式
在飞机模式时,当旋翼轴倾转至于机身垂直时(δnac=90),倾转旋翼机进入飞机模式,此时对应的前飞速度为25~40 m/s。在该飞行模式下,随着前飞速度的不断增大,旋翼要产生更大的前向拉力来平衡不断变大的机体阻力,旋翼总距同步操纵也随着增加。在飞机模式中,倾转旋翼机俯仰运动均由纵向周期变距控制为了使飞行器按照固定翼飞机的飞行特性进行配平计算,随着前飞速度增加,机体俯仰角逐渐变小。
3.2.2 转换路径2
直升机模式时,由于飞机操纵功效不足,采用旋翼进行控制,进入过渡阶段(15~25 m/s)不再使用旋翼,仅采用舵面对倾转旋翼机进行控制,进入飞机模式仍然仅采用舵面控制。计算结果如图9~图11所示。
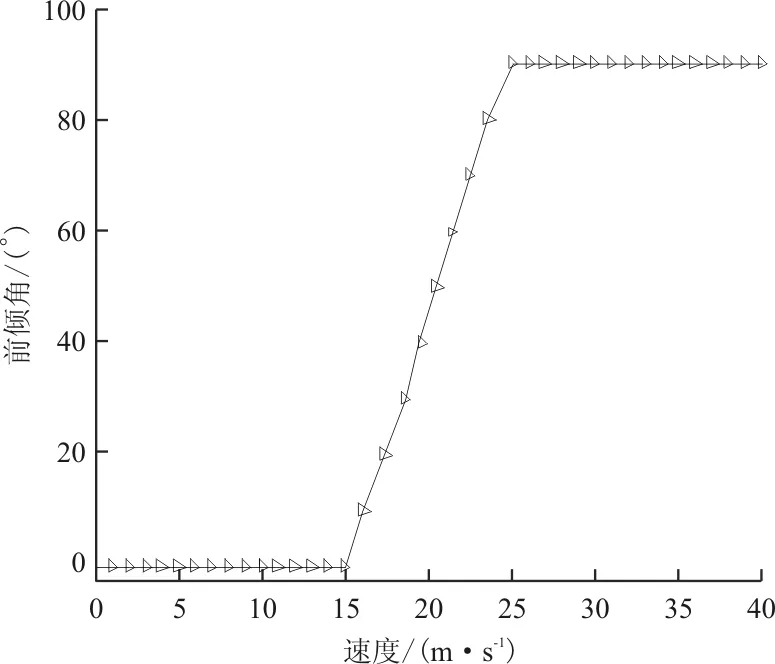
图9 前倾角随速度变化曲线(路径2)
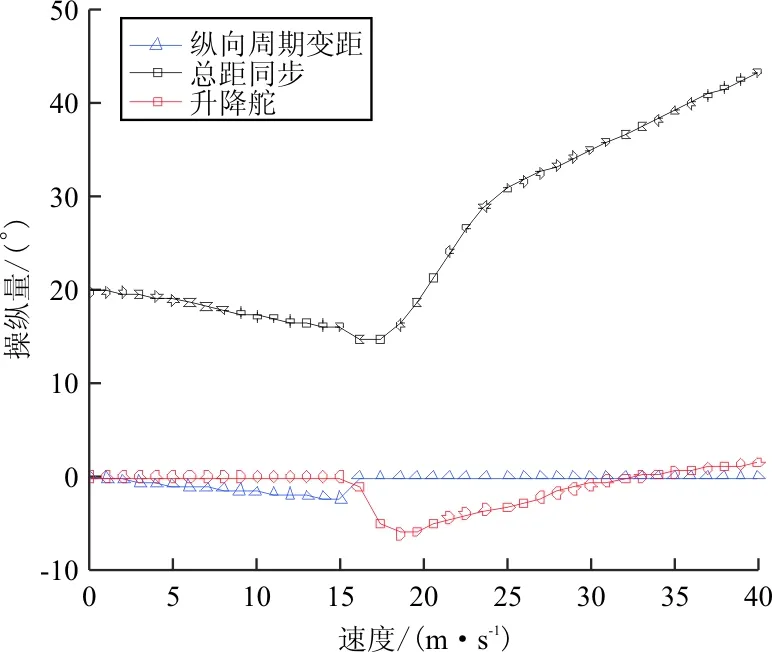
图10 操纵量随速度变化曲线(路径2)
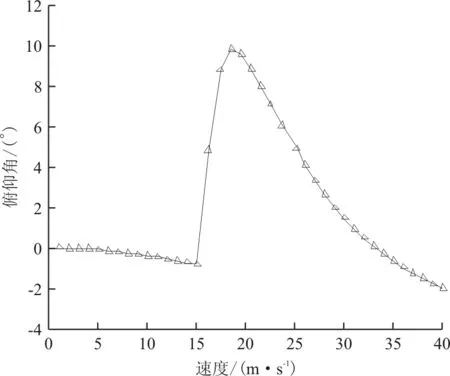
图11 俯仰角随速度变化曲线(路径2)
(1) 直升机模式
在直升机模式时,由于纵向运动采用旋翼纵向周期变距控制,跟飞行转换路径1中相同,在此不再赘述。
(2) 过渡模式
在倾转过渡模式时,倾转旋翼机在桨轴前倾角由0逐渐增大到90°的过程中为倾转过渡飞行模式,其对应的前飞速度为15~25 m/s。在该飞行模式下,随着旋翼轴倾转角的增大,机体前飞速度逐渐增大,旋翼总距同步操纵逐渐增加,这是因为桨轴倾转后旋翼的轴向来流增大,导致桨叶有效迎角减小,为了使旋翼产生更大的有效拉力和前向力分量,需要增加旋翼总距。在倾转过渡模式配平过程中,期望倾转旋翼机能以正的俯仰姿态进行定直飞行,使机翼可产生更大的升力,用来消除由于旋翼短舱前倾角倾转使总距产生的垂向拉力减小的影响,从而保持飞机不掉高度,俯仰角变化如图11所示。进入倾转过渡阶段后旋翼纵向周期变距处于平衡位置,仅采用升降舵控制倾转旋翼机的俯仰姿态,从图10可以看出:升降舵往负方向偏转,使平尾的有效迎角减小,从而产生一个正的俯仰力矩使倾转旋翼机抬头。从图9~图11可以看出:在倾转过渡模式下配平计算得到的倾转旋翼机各状态量和操纵量变化相对平稳,没有出现较大的跳跃运动,符合实际飞行操纵习惯,表明所选择的过渡飞行路径是可行的。
(3) 飞行模式
在飞机模式时,当旋翼轴倾转至于机身垂直时(δnac=90),倾转旋翼机进入飞机模式,此时对应的前飞速度为25~40 m/s。在该飞行模式下,随着前飞速度的不断增大,旋翼要产生更大的前向拉力来平衡不断变大的机体阻力,旋翼总距同步操纵也随着增加。在飞机模式中,倾转旋翼机俯仰运动均由升降舵控制,随着前飞速度的增加,升降舵的操纵功效逐渐增大且机体俯仰角逐渐变小,因此升降舵偏量逐渐减小,保证了倾转旋翼机按照固定翼飞机的飞行特性前飞。
3.2.3 转换路径3
直升机模式采用旋翼进行配平计算,根据3.2.2节的切换策略,在倾转过程中采用旋翼和舵面协同控制的方式,当短舱前倾角等于60°时不再使用旋翼,仅通过改变舵偏角控制飞机姿态,进入飞机模式仍然只用飞机舵面进行控制,计算结果如图12~图14所示。
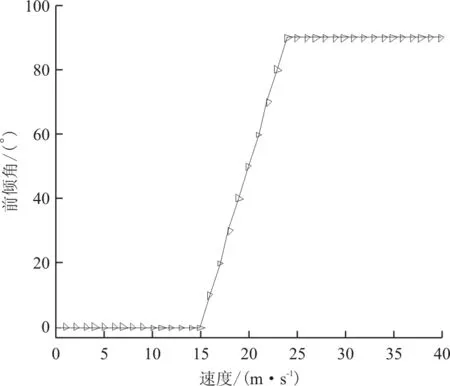
图12 前倾角随速度变化曲线(路径3)

图13 操纵量随速度变化曲线(路径3)
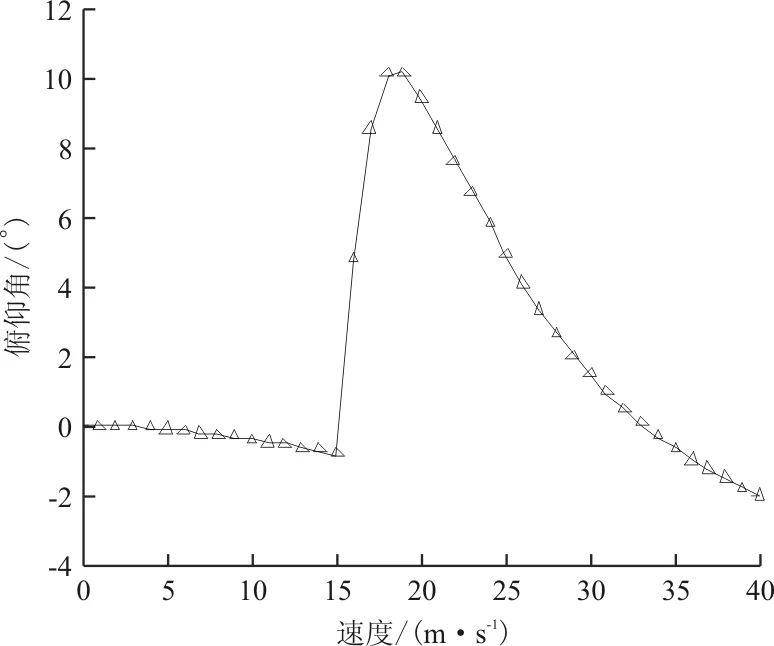
图14 俯仰角随速度变化曲线(路径3)
(1) 直升机模式
在直升机模式下,用纵向运动采用旋翼纵向周期变距控制,和飞行转换路径1、飞行转换路径2中相同,在此不再重复。
(2) 过渡模式
在过渡模式下,15~25 m/s前倾角逐渐从0°~90°(如图12所示),旋翼的轴向来流逐渐增大,使桨叶有效迎角减小,因此需要增加总距操纵量使旋翼产生有效拉力。随着前飞速度的增加,升降舵偏角逐渐增大,纵向周期变距逐渐减小,共同为过渡阶段提供俯仰力矩以保持飞机的俯仰姿态,进入过渡阶段后期,纵向周期变距减小到0,完成直升机模式到飞机模式的过渡,如图13所示。俯仰角姿态在刚倾转时变化较大(如图14所示),原因主要是随着短舱前倾,旋翼拉力在Z负方向的分量变化不大,但产生了一个在X向的力臂,正的俯仰力矩的出现导致倾转旋翼机抬头,随着短舱继续前倾,旋翼拉力在X向的分量逐渐增大,在Z负方向的分量逐渐减小,因此产生的俯仰力矩逐渐减小,俯仰角也逐渐减小。从图12~图14可以看出:在倾转过渡模式下配平计算得到的倾转旋翼机各状态量和操纵量变化相对平稳,没有出现较大的跳跃运动,符合实际飞行操纵习惯,表明所选择的过渡飞行路径是可行的。
(3) 飞行模式
在飞机模式下,倾转旋翼机可视为螺旋桨飞机(如图13所示),由于前飞速度逐渐增大,需要旋翼总距提供更大的拉力,因此旋翼总距增大;机翼提供升力以克服倾转旋翼机自身的重力;升降舵提供俯仰力矩控制倾转旋翼机的姿态;俯仰角随着前飞速度增大而减小(如图14所示)。
综上所述,三种飞行转换路径方案均可行,可为控制律重构提供保障。
4 结 论
(1) 计算了在舵面独立控制的操纵方式下,单位操纵面位移引起的气动力矩改变量,表明倾转旋翼机的冗余操纵面具有一定的操纵功效,在同一飞行模式下可以采用不同的舵面对飞行器进行控制。
(2) 给出了不同飞行模式下各通道分配权重系数矩阵,通过更改矩阵 中各通道操纵分配的非零权重系数,可完成三种飞行模式转换。
(3) 针对倾转旋翼以直升机模式起飞,加速进入过渡飞行模式,最后进入飞机模式这一过程进行了配平计算,从理论上确定了三种可行的全模式飞行转换路径方案。
(4) 三种方案都能实现对倾转旋翼机的飞行控制,表明倾转旋翼机的冗余舵面控制重构是可以实现的。
