电梯制动器机械装置提起(或释放)验证的研究*
2019-03-05卫小兵陈剑锋王敏星王力峰李寒冰
卫小兵,陈剑锋,王敏星,王力峰,李寒冰
(河南省特种设备安全检测研究院,河南 郑州450004)
0 引言
近年来,电梯因制动器机械装置不能正确提起(即带闸运行)和释放等故障引起制动力不足造成的剪切、挤压、坠落等伤害事故频发[1-8],给电梯安全运行带来了巨大威胁,造成了严重的社会影响和经济损失。目前,永磁同步无齿轮曳引机在国内大量使用,电梯制造商为降低生产成本多采用工作制动器作为上行超速保护的减速元件和轿厢意外移动的制停部件[9-10],造成制动器既承担电梯轿厢停止的工作部件,又承担安全保护的制动装置。由于制动器动作频繁,为确保制动工作稳定和可靠,应对其机械装置的正确提起(或释放)进行验证。《电梯制造与安装安全规范》国家标准第1号修改单(GB 7588-2003/XG1-2015)第9.11.3条中规定了对制动器机械装置正确提起(或释放)的验证,要求如果检测到失效,应关闭轿门和层门,并防止电梯的正常启动,但对如何实现验证没有具体规定。
目前,对制动器机械装置正确提起(或释放)的验证一般通过制动器检测开关动作信号[11-12]传输到电梯主控板上监控实现[13-14]。然而,由于部分电梯制造单位对检测开关接线设计或安装维保人员检测开关接线方法错误,导致检测开关起不到应有的作用,不能检测到制动器机械装置的工作异常,因制动器失效和制动器制动力矩不足引发的事故时有发生[15-16]。现有的研究较多关注理论方法,对工程技术研究较少;关注检测开关本身原因较多,根据制动器型式选择检测开关的接线方式的研究较少,对于正确设置制动器检测开关作用较小。为确保电梯制动器检测开关能检测到电梯制动器机械装置的工作异常,本文结合电梯制动器的型式和检测开关的动作原理,对各种检测开关接线方式进行分析,针对制动器的型式提出合理的检测开关接线方式,旨在将因制动器机械装置提起(或释放)的异常造成的危险情况消除在初始状态。
1 制动器型式及机械装置的提起(或释放)距离
电梯采用常闭式制动器,即制动线圈失电时,在机械力(即制动弹簧)的作用下制动闸瓦(制动钳)与制动轮(制动盘)摩擦产生制动力矩,电梯停止运行,此时制动器的机械装置处于释放状态;制动线圈通电时,在电磁力(即制动电磁铁)的作用下克服机械力使制动闸瓦(制动钳)离开制动轮(制动盘),其间隙在不发生摩擦的情况下越小越好[17],此时制动器的机械装置处于提起状态,电梯运行,因此又称电磁制动器。
目前我国电梯上的制动器主要有块式制动器和盘式制动器2种形式。
1.1 块式制动器
块式制动器分为板式制动器和鼓式制动器2大类。
1.1.1 板式制动器
1)外板式制动器通电原理如图1所示。由图1可知,当制动器线圈通电时,动铁芯在制动器线圈形成的电磁力作用下带动制动片(即制动闸瓦),克服制动弹簧压力,离开制动轮向外平移距离a,制动片脱离制动轮,曳引轮运转,此时制动器的机械装置处于提起状态;当制动线圈失电时,静铁芯内的制动弹簧直接推动动铁芯,带动制动片压在制动轮面上,形成制动力矩,此时制动器的机械装置处于释放状态。目前使用的板式制动器动铁芯移动距离a一般情况下小于1 mm。
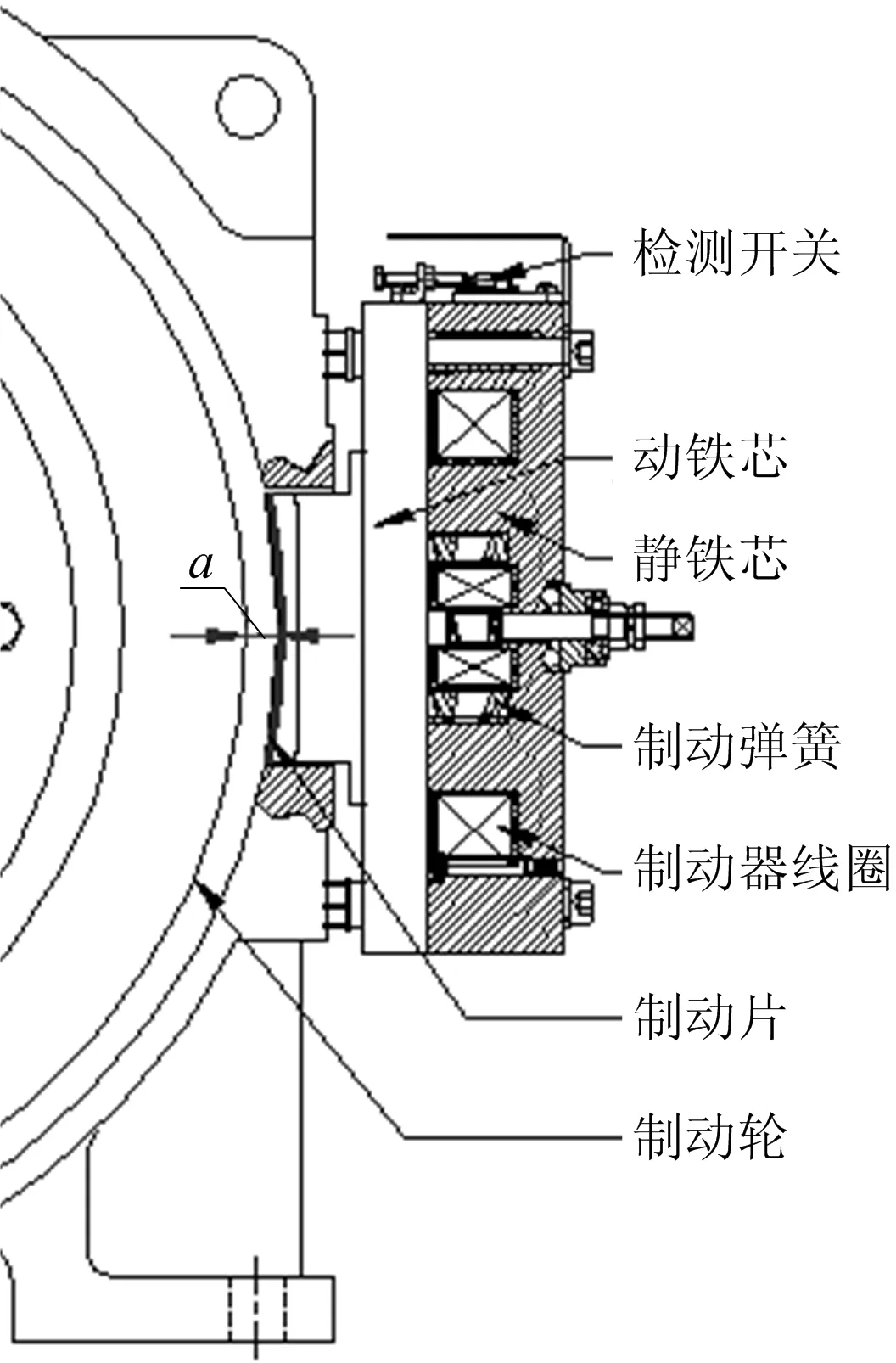
图1 外板式制动器通电原理Fig.1 Schematic diagram of plate brake electrification
2)内板式制动器的工作原理与外板式制动器基本相同,二者区分在于制动器动轮的工作面分别为外轮面和内轮面,内板式制动器在提起状态时,制动片离开制动轮向内平移。目前,使用内板式制动器线圈通电时向内平移距离(即动铁芯的位移距离)与板式制动器基本一致,一般情况下小于1 mm。
1.1.2 鼓式制动器
鼓式制动器是目前使用最广泛的制动器,通电原理见图2。从图2可知,当制动线圈通电时,动铁芯在制动器线圈形成的电磁力作用下,推动制动臂带动制动片,沿偏心轴通过杠杆作用克服制动弹簧的压力,离开制动轮,此时制动器的机械装置处于提起状态。如制动器动铁芯使制动臂带动制动片完全离开制动轮距离a的长度,制动器铁芯的移动距离要达到b的长度,b远大于a;当制动线圈失电时,在制动弹簧的压力下,通过制动臂带动制动片将制动轮抱紧,保证了电梯处于不工作的静止状态,此时制动器的机械装置处于释放状态。目前在用鼓式制动器的电梯动铁芯的位移距离多在2~6 mm之间。

图2 鼓式制动器通电原理Fig.2 Schematic diagram of drum brake electrification
1.2 盘式制动器
盘式制动器的工作原理与板式制动器基本相同,其通电原理如图3所示,当制动器线圈通电时,动铁芯在制动器线圈形成的电磁力作用下带动制动片(即制动钳),克服制动弹簧压力,离开制动盘向外平移距离a,制动片脱离制动盘,曳引轮运转,此时制动器的机械装置处于提起状态;当制动线圈失电时,静铁芯内的制动弹簧直接推动动铁芯带动制动片压在制动盘面上,形成制动力矩,此时制动器的机械装置处于释放状态。目前使用的盘式制动器距离a一般情况下小于1 mm。

图3 盘式制动器通电原理Fig.3 Schematic diagram of disc brake electrification
通过对块式制动器和盘式制动器动铁芯推动机械装置提起(或释放)分析,把制动片在动铁芯的作用下水平移动的板式制动器、盘式制动器称为直压式制动器;把制动片在动铁芯的作用下沿偏心轴的中心做杠杆运动的鼓式制动器称为杠杆式鼓式制动器。
2 制动器检测开关监控原理
1)制动器机械装置的提起(或释放)是靠制动器的动铁芯位移来实现的,采用检测开关对动铁芯位移进行验证,就会实现对制动器机械装置提起(或释放)的验证。在通电或失电情况下,直压式制动器动铁芯的移动距离较小,一般情况下都小于1 mm;杠杆式鼓式制动器动铁芯的移动距离较大,大都在2~6 mm之间。
2)制动器检测开关一般使用微动开关,电梯检测开关的通断瞬间距离远小于1 mm。直压式制动器动铁芯移动距离较小,与微动开关特性相符,故可采用只有1个通断状态的检测开关来对机械装置的提起(或释放)进行验证。杠杆式鼓式制动器机械装置的提起(或释放)移动距离在2~6 mm之间,远大于1 mm,如果检测开关在制动器机械装置完全提起时动作,检测开关无法正确监测制动器机械装置是否完全释放;如果检测开关在制动器机械装置完全释放时动作,检测开关无法正确监测制动器机械装置是否完全提起,因此,需要用同时具备2个通断状态的检测开关来进行验证。
3)《电梯制造与安装安全规范》(GB 7588-2003)第12.4.2.1项和《电梯曳引机》(GB/T 24478-2009)第4.2.2.2项规定,所有参与向制动轮或盘施加制动力的制动器机械部件分2组装设,因此每1组机械部件都应有检测开关进行验证。
4)制动器上检测开关的作用是利用制动器线圈通电或失电时制动器铁芯产生的位移触动检测开关的通断,通过正确的检测开关接线方式反映到主板上,从而判断制动闸瓦(制动钳)的打开或闭合。其动作原理如图4~5所示。
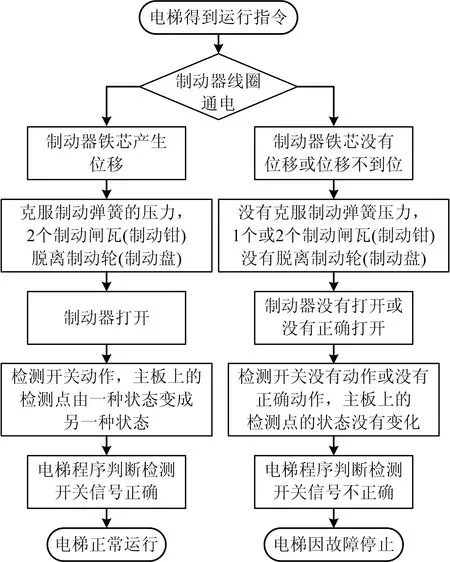
图4 电梯运行时制动器上检测开关动作原理Fig.4 Schematic diagram of detecting switch action on brake during elevator operation

图5 电梯停止时制动器上检测开关动作原理Fig.5 Schematic diagram of detecting switch action on brake when elevator stops
3 制动器检测开关的接线方式分析
3.1 1个通断状态的检测开关
1)制动器上2个检测开关(制动器机械装置每组1个)为常开并联或常闭串联,见图6 。从图中可以看出,当制动器通电,机械装置提起后,如果出现1组制动闸瓦(制动钳)没有提起或没有正确提起,会造成1个检测开关没有动作(常开并联为没有闭合,常闭串联为没有打开),但主控制板上的监控点已发生变化,故不能检测其中1组机械装置没有提起引起的带闸运行。

图6 检测开关为常开并联和常闭串联Fig.6 Normally open in parallel and normally closed in series of detection switch
2)制动器上2个检测开关(制动器机械装置每组1个)为常闭并联或常开串联,见图7。从图中可以看出,当制动器失电机械装置释放后,如果出现1组制动闸瓦(制动钳)没有正确闭合时,会造成1个检测开关没有动作(常闭并联为没有闭合,常开串联为没有打开),但主控制板上的监控点已发生变化,故不能检测其中1组机械装置没有释放引起制动力不足,而程序却认为电梯处于正常状态,使电梯的再次运行安全无法得到保证。
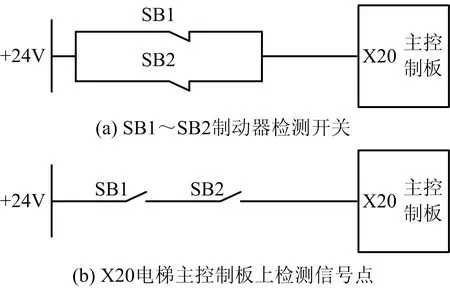
图7 检测开关为常闭并联和常开串联Fig.7 Normally closed in parallel and normally open in series of detection switch
3)电梯控制系统上有2个检测信号点的,制动器上2个检测开关(制动器机械装置每组1个)无论常开还是常闭,都可以对制动器机械装置的提起(或释放)进行监控,见图8。
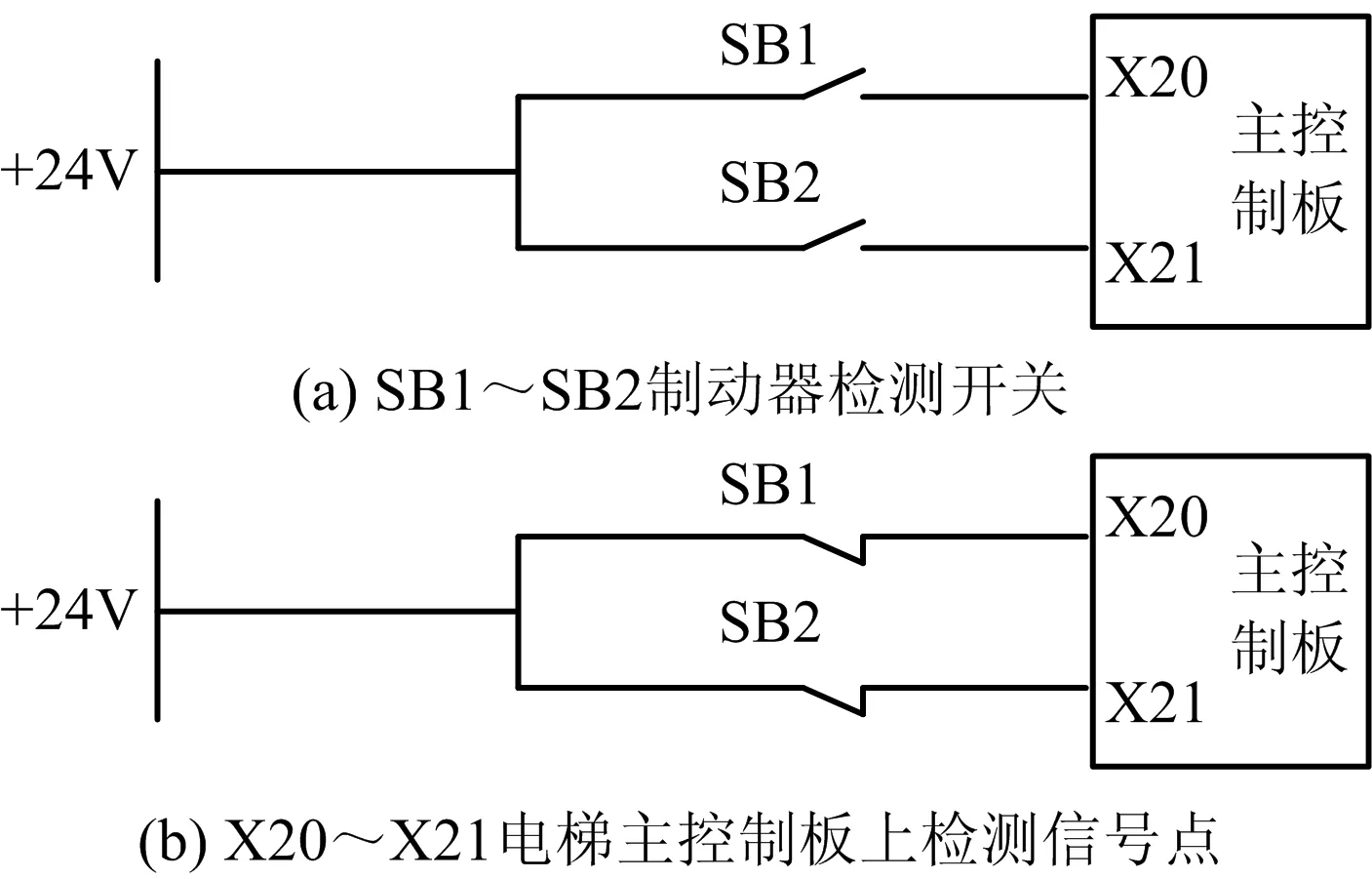
图8 主控制板上2个检测信号点Fig.8 Two detection signal points on the main control board
通过上面对接线方法进行分析可以看出,图6无法检测到制动器带闸运行,图7无法检测到电梯只有1组制动闸瓦(制动钳)制动的情况,只有图8能同时对制动器带闸运行和电梯出现1组或2组制动闸瓦(制动钳)没有制动的情况进行监控,但这种接线方式只能用于制动器铁芯移动距离小于1 mm的直压式制动器,而不适用于杠杆式鼓式制动器。
3.2 2个通断状态的检测开关
对杠杆式鼓式制动器必须用具备2个通断状态的检测开关对其进行验证。根据控制系统上检测信号点的不同,分别设计了2种接线方法,主控制板上有2个检测点的接线方法如图9所示,主控制板上有1个检测点的接线方法如图10所示。

图9 2个通断状态的检测开关和2个信号点Fig.9 Two on-off state detection switches and two signal points
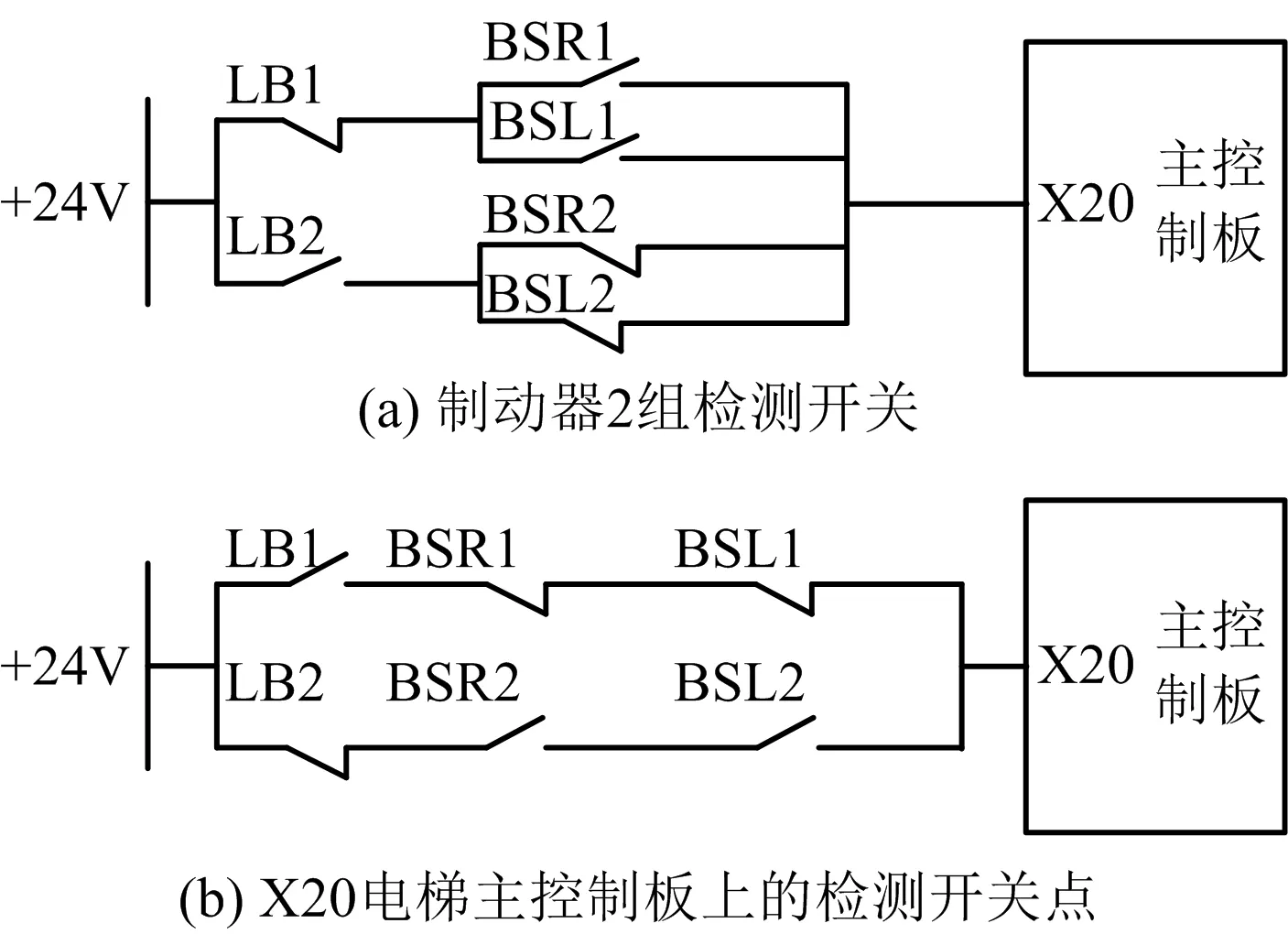
图10 2个通断状态的检测开关和1个信号点Fig.10 Two on-off state detection switches and one signal points
3.2.1 控制系统上2个检测点
BSR1和BSL1为制动器闭合时的检测开关,常开状态时应并联,常闭状态时应串联;BSR2和BSL2为制动器打开时的检测开关,常闭状态时应并联,常开状态时应串联。
1)由于常开并联或常闭串联检测的是制动器机械装置的释放,在电梯停止时,如果出现1组制动器的机械装置没有正确闭合时,会造成1个常开并联检测开关没有打开(或常闭串联检测开关没有闭合),电梯在停止时程序可判断检测信号不正确,电梯处于故障状态,不能再次运行。
2)由于常闭并联或常开串联检测的是制动器机械装置的提起,在电梯启动后,如果出现1组制动的机械装置没有正确打开时,会造成1个常闭并联检测开关没有打开(或常开串联检测开关没有闭合),电梯在运行时程序可判断检测信号不正确,电梯会因故障停止。
3)BSR1和BSL1为制动器打开时的检测开关,常开状态时并联,常闭时串联,不能检测其中1组机械装置因没有提起引起的带闸运行;BSR2和BSL2为制动器闭合时的检测开关,常闭状态时并联,常开时串联,不能检测其中1组机械装置因没有释放引起的制动力不足。
3.2.2 控制系统上1个检测点
从图10可以看出,此接线方式的控制原理与3.2.1基本一致,但增加制动器接触器LB的辅助触点LB1和LB2来确保检测信号灯X20维持1种信号不亮的状态。如果检测信号灯X20亮,则出现制动器机械装置提起(或释放)不正常,电梯处于故障状态。制动器失电时,制动器机械装置闭合,制动器接触器断开带动辅助触点动作,如图10(a)所示的LB1闭合、LB2断开以及如图10(b)所示的LB1断开、LB2闭合。BSR1和BSL1为制动器闭合时的检测开关,常开状态时应并联,常闭状态时应串联;BSR2和BSL2为制动器打开时的检测开关,常闭状态时应并联,常开状态时应串联。
4 结论
1)分析了制动器型式及机械装置的提起(或释放)距离,对铁芯移动距离小于1 mm的直压式制动器,用1个通断状态的检测开关对其机械装置的提起(或释放)进行验证;对铁芯移动距离在2~6 mm之间的杠杆式鼓式制动器,用具备2个通断状态的检测开关对其机械装置的提起(或释放)进行验证。
2)对于1个通断状态的检测开关验证制动器机械装置的提起(或释放)的接线方式,应在电梯的主控板上设置2个检测点,不论与检测点连接的检测开关常开或常闭都可以检测到制动器的机械装置是否正确提起(或释放),主要用于直压式制动器。
3)对于2个通断状态的检测开关验证制动器机械装置的提起(或释放)的接线方式,应采用常开并联或常闭串联的方式检测制动器机械装置的释放,采用常闭并联和常开串联的方式检测制动器机械装置的提起,主要用于杠杆式鼓式制动器。
