基于多角度旋转积分图的手背静脉身份识别
2019-03-05,
,
(北方工业大学 电子信息工程学院,北京 100144)
0 引言
随着互联网+经济模式飞速发展,个人的身份信息如何得到安全保护是目前研究的热点。一般来说,主要身份认证方法包括利用识别工具进行身份验证,比如个人身份物件卡片、钥匙等;还有利用验证人的知识进行验证,例如密码和账号等方式。这些方法有的易于遗忘或丢失,有的容易被窃取,不是本人也能利用这些信息进行身份验证,安全性得不到保障,它们的发展遇到了瓶颈。
在个人身份认证需要得到安全保证,各种身份验证问题层见叠出的背景下,生物特征识别技术作为新型的、安全的、可靠的身份验证方法应时而生,也得到了令人惊叹的发展进步。
生物特征识别技术就是利用个人所独有的生物特征来达到身份验证的目的,这些生物特征需要具备一些独特的、稳定的、不容易随着年龄、外貌、环境等外在因素轻易改变的特性和优势。这些生物特征是个体与生俱来的、独有的,例如虹膜、耳廓、指纹、静脉等,不会轻易泄露出本人的身份信息,且容易利用计算机等多种设备的优势,共同发挥作用,便于自动化管理[1]。生物特征以其优势在身份验证中处于举足轻重的地位,在各个领域带来了很大的社会效益和经济效益[2]。
尽管如此,并不是所有的生物特征都能拥有很好的安全性、便捷性和可靠性。例如,由于无论是否保证活体检测都可通过的一些生物特征,例如指纹技术易于被复制和窃取;脸部识别也不一定能区分面部过于相似的人们,例如双胞胎兄弟;虹膜识别技术对于设备的要求非常高,因此价格相对比较昂贵,且这项技术需要用户的高度配合,所以目前仍然不能在市场上大规模应用;另外,人的步态也很容易被模仿,没有很好地体现出生物特征识别的优势。因此,如何寻找和发展一个能保证唯一性、不易复制性、活体检测性的识别技术便成为了当前生物特征识别技术研究的关键。近年来,手背静脉识别以它明显的优势和鲜明的特征获得了普遍的推崇和赞誉。首先,手背静脉对每个人的唯一性和长期稳定性已经得到了证明,任何人就算是双胞胎兄弟也不会完全相同,且人在成年后手背静脉不会有明显变化[3]。其次,由于手背静脉是皮下组织,不会像其他表皮组织那样轻易受到损伤,且污垢和汗水等外在条件也不会对其有很大的影响。另外,由于手背静脉是静脉血管检测,必须保证检测在活体状态下进行,在一定程度上也进一步保证了检测是安全性。综上所述,手背静脉的活体特性和内部特性决定了它的鲁棒性、安全性和不易伪造性[4]。最后,手背静脉采集技术采用的成像方法属于非接触式的成像,这样不易像指纹采集那样留下被采集者的指纹信息,保证了信息的安全,又使得采集容易完成,且采集设备造价不高,因此在一些国家(比如日本、韩国和新加坡等)都已经进入了实用领域,商业上备受关注[5],也为一切领域带来了不错的经济效益和社会效益。
从信息量的角度上来说,手背静脉图像的信息量不比指纹图像的信息量小。而且它类内平均互信息熵较大,类间平均互信息熵较小的特点[6],也使得它的识别效果会相对较好。
由于成像设备参数、用户状态、摆放位置以及采集环境条件(如光照、温度)等因素的不同,获取的静脉图像也可能存在很大的不同。本文针对手背静脉图像由于旋转,亮度和尺度等因素导致识别率不理想的问题,提出了一种基于多角度旋转积分图的手背静脉图像特征提取的方法,再结合二维离散余弦变换(DCT)截取最佳的特征矩阵用于分类识别。该方法通过选取最佳的旋转角度做积分运算,解决了图像旋转因素的影响,并在此之后进行二维离散余弦变换,保证了算法的尺度空间不变性,最后截取最佳的特征矩阵用于分类识别,使得手背静脉图像的识别率超过99.9%,大大提升了算法的精确度。
1 手背静脉图像采集和预处理
1.1 采集设备
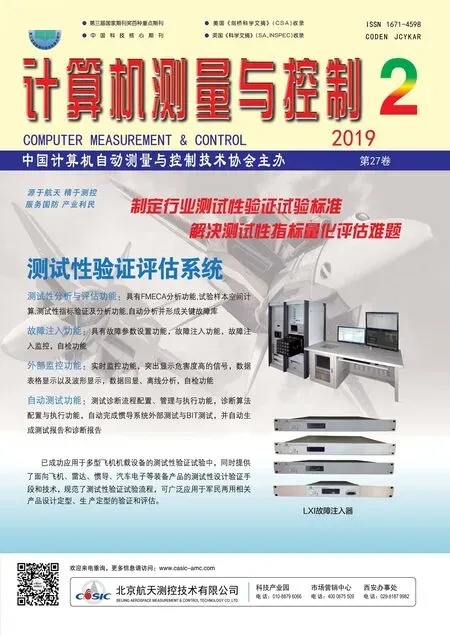
手背静脉的特殊性在于其存在于皮下脂肪之下,采用普通的摄像头和可见光源很难清晰地拍摄到手背静脉图像。低质量图像会导致识别率降低,所以如何获取高质量的利于进行特征提取识别研究的手背静脉图像是一个关键性的问题。经过大量的实验验证,手背静脉与其他组织对某些特定波长近红外光(本实验中波长为850 nm的红外光波)吸收程度不同,另外它很好地穿透皮肤,使血液流过的地方形成更鲜明的对比,清晰地呈现出静脉结构。根据这个原理设计图像采集装置的外部由放置手背的手柄和半封闭式黑盒子组成,如图1(a)所示,特定材料的黑色盒子有效的阻挡了其他干扰光源对图像的影响。采集装置内部由CCD(Charged Coupled Device)像机、光学滤光片、LED列阵和均光片组成,如图1(b)所示。
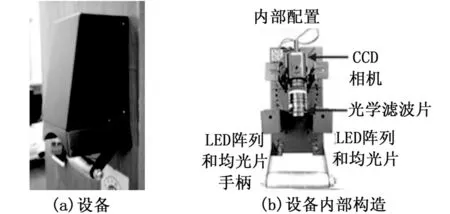
图1 图像采集设备示意图
图2是利用上述采集装置采集到的原始手背静脉图像。
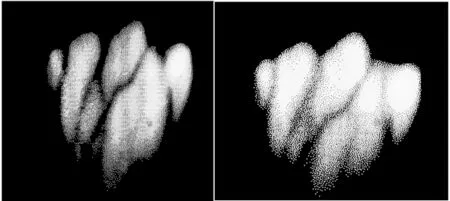
图2 手背静脉原始图像
1.2 图像预处理及纹理分割
由图2可知,相同的人在不同采集设备终端由于采集时的焦距、光照强度、手摆放的位置不同采集到的采集到的手背静脉图像在亮度、手背区域尺寸大小等方面也存在很大的差异。故采用经质心自适应的方法确定感兴趣区域(Region OfInterest,ROI)[7],并求出ROI图像的质心C(x0,y0),计算公式如下:
(1)
式中,B(x,y)是(x,y)处的灰度值大小。最大内接圆示意图如图3所示。
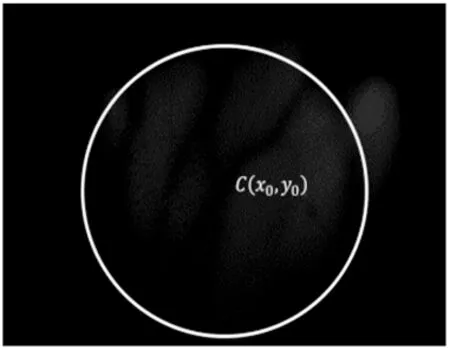

图3 手背图像最大内接圆
简单的尺度归一化处理得到的图片不利于提取训练的特征,所以本文采用手背静脉图像最大内接圆的方法进行尺度归一化处理[13]。最大内接圆的面积Spalm作为手背静脉图像尺度归一化的标准,确定静脉区域缩放因子后,原始手背静脉图像根据比例系数Rnorm可以归一化成相同尺度,计算公式如下:
(2)
图像归一化成相同尺度后,截取了包含静脉区域的ROI区域图像,如图4所示。
图4 ROI手背静脉图像
采集的原始图像为灰度图,手背静脉与手背区域的对比不是特别明显,这个因素导致静脉识别身份鲁棒性很差,所以需要将尺度归一化后的图像进行而进行二值分割。简单的二值分割容易造成过分割和欠分割,过分割会将不属于静脉的部分划分为静脉纹理,欠分割会把某些静脉部分分割成背景区域。常见的分割方法有这几种,分别是Niblack方法[8],Sauvola方[9],阈值图像法[10],最大类间方差法[11]等,然而这些方法对于某些手背图像(例如女生志愿者,她们的静脉血管很细,图像静脉和北京区域对比不明显)的分割效果太差,出现过分割和欠分割甚至出现几乎全分割(接近空白)的图像。为了获取清晰的手背静脉的轮廓,排除由于皮肤或者静脉血管亮度差异带来的影响,本文采用检测边缘性能的静脉图像梯度分割方法[12]。
对于Niblack方法来说,如果将原来的负值k变为正值,计算公式为:
3×3×3
(3)
将全局最大值方差R(一般将该值设为128)替代m(x,y)则为Sauvola算法,计算公式如下:
3×3×3
(4)
如果在计算的时候引入全局最大梯度G(一般将该值设为255),就是本文使用的基于更有效的检测边缘性能的梯度方法,计算公式如下:
3×3×3
(5)
(6)
式中的m(x,y)是窗口N×N中的均值,g(x,y)是N(x,y)处的梯度,k(x,y)是自适应系数,由公式(4)来确定,G(x,y)是像素点邻域范围内的最大梯度,α和β通过实验确定的经验值分别为0.01和0.02。
二值分割后的手背静脉图像如图5所示。

图5 手背静脉图像分割结果
2 算法原理
自从summed-area tables算法被提出以后,Viola将这个将其用于人脸分析,积分图像作为图像的一种特征提取的中间表示方法[14]。后来很多文章也将积分图算法运用于图像配准,求内接圆,图像标注等等。本文在图像预处理的基础上,提出基于多角度旋转积分图并结合二维离散余弦变换的手背静脉图像识别方法。它进行多角度旋转积分提取经过预处理的静脉图像特征,对由于图像旋转角度变化,尺度等因素来说都具备优良的鲁棒性。接下来文章将从对手背静脉图像进行多角度旋转积分为出发点,对积分后的图像进行处理,对参数进行优化选择,使得多角度积分图像更好地适用于特征提取。
2.1 多角度旋转积分图
由于不限制志愿者的手背摆放姿势,利用采集装置采集到的不同的手背静脉图片都会存在一定角度的旋转。本文在积分图的基础上,提出旋转积分图,经过多次的旋转,使不同的图片都能通过旋转得到几乎相同用于积分的积分向量,增加识别的鲁棒性。
从原始位置开始,根据设定的角度间隔不断旋转图片,然后对手背静脉图像ROI区域二值图像进行纵轴方向积分,计算公式如下:
(7)
式中,r(θm)用于表示第m个积分向量的向量表达式,m为对其中一个位面图进行旋转的旋转次数;θm用于表示第m旋转图像与其中一个图像之间相差的角度间隔,Im(i,j)表示第m旋转图像的矩阵表达式。其中,i为第m旋转图像的行像素点,j为第m次旋转的图像的列像素点,L为总行数。
具体如下,图像ROI区域二值图像向逆时针方向旋转360/m度,获得第一旋转图像,并对这个旋转图像进行积分来获得第一个积分向量。将第一旋转图像沿逆时针方向旋转360/m度,获得第二旋转图像,并对这个旋转图像进行积分运算获得第二个积分向量;重复旋转图像和对图像进行图像积分处理的步骤,直至将第m-1旋转图像沿逆时针方向旋转360/m度,获得第m旋转图像以及第m积分向量。
为了便于数据分析,将得到的m个积分向量进行向量堆积运算,获得一个新的矩阵,计算公式如下:
(8)
其中:r(θm)用于表示第m积分向量的向量表达式,R(x,y)用于表示对第一积分向量至第m积分向量进行向量堆积运算之后获得的二值积分图像的矩阵表达式,其中x用于表示二值积分图像的矩阵中的第x行,y用于表示二值积分图像的矩阵中的第y列。将各个积分向量堆积在一起后,积分图像中包括m个积分向量。
将这些积分向量运用欧氏距离(该方法将在下文详细介绍)进行分类识别,不同旋转角度下最高识别率也只有90%,识别效果一般。为了更好地利用该积分向量,本实验提出在多角度旋转积分后再利用二维离散余弦变换的方法,大大提高了识别率。
2.2 基于DCT变换的特征提取
多角度旋转获取的积分图包含了手背静脉的特征,但是存在很多的冗余信息,包括空间冗余,结构冗余等,另外不同的旋转角度使得每次手背静脉图像在积分后带来的尺度变化,从而导致识别率的下降。为了维持尺度不变性和压缩经过旋转积分运算的冗余信息,将经过旋转积分后堆积在一起的总的积分向量进行二维离散余弦变换(discrete cosine transform,二维离散余弦变换不仅可以保证高效性和实时性的,同时计算速度也很快,计算公式如下:
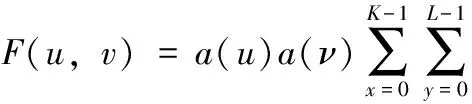
(9)
式中,F(u,ν)用于表示经过多次旋转积分后得到的堆积的总的积分向量进行DCT变换之后得到的表达式。其中,u和ν分别用于表示预设参数,R(x,y)表示对第一积分向量至第m积分向量进行向量堆积运算之后获得的积分图像的矩阵表达式;K为进行DCT变换的积分向量的总行数,L为进行DCT变换的积分向量的总列数。积分向量经过DCT变换后如图6所示。

图6 DCT变换后的图像
如图6所示,积分向量在DCT变换后,信息能量几乎都位于输出矩阵的左上方位置,也就是图像的特征几乎存在于低频区域[15]。为了去掉冗余信息,提取到更加有效的待识别特征,根据能量分布截取DCT变换后图像的左上角N×N区域,公式如下:
(10)
由于获得的低频矩阵为二维矩阵,若将该低频矩阵作为待识别特征进行身份认证,则会使得认证的计算过程较为复杂,降低认证效率。因此,为了提高后续对身份认证过程的认证计算效率,将公式(10)中的低频矩阵转换成1×N2的一维特征矩阵,计算公式如下:
(11)
2.3 特诊矩阵匹配
此时,我们已经将手背静脉图像经过预处理用于旋转积分运算的二值图,经过多角度积分和二维离散余弦变化提取特征后,将图像的特征表示为待识别一维矩阵。

(12)
找出通过公式(12)所求得的特征距离,计算特征距离的最小值d,计算公式如下:
(13)
因此,测试样本Rt被识别为d所对应的第t类注册样本Rt′。
3 参数选择及实验分析
在这个实验中,为了充分反映本文提出方法实验效果的有效性和可行性,在本实验中收集了50名志愿者的手背静脉图像。 采集设备每采集一次图像调整一遍参数,且不限制志愿者左右手的摆放位置和他们的姿势。他们的左右手分别采集10张图像,其中5张图像用于进行训练,另外5张图像进行测试,50名志愿者的左右手相当于100个类别。
实验的整个手背静脉图像装置识别流程如图7所示。
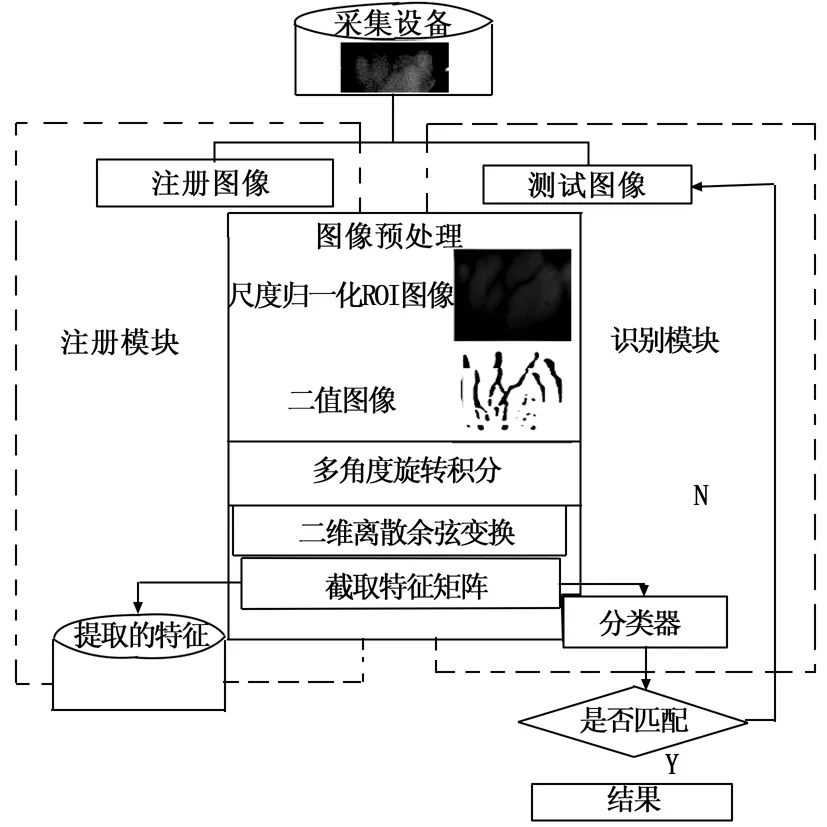
图7 整个实验流程图
对经过预处理的手背静脉图像从0~30°间隔的角度旋转,每旋转一次做一次积分运算,将多次积分运算得到的积分向量堆积在一起,然后做二维离散余弦变换并截取特征矩阵通过欧氏距离做分类识别,识别结果如图8所示。
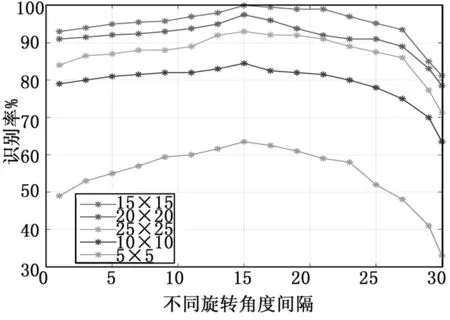
图8 多种旋转间隔和特征矩阵下的识别率
如图8,随着旋转角度间隔持续增加,识别率也慢慢变大。旋转角度间隔是15°时,识别率达到本实验中最高。当旋转间隔角度过小时,不仅程序运行缓慢,而且还存在大量冗余信息。随着旋转间隔的增加,旋转次数变少,图像的特征变小。另外,旋转角度间隔超过25°时,由于旋转角度间隔变大了,那么旋转次数将变少了,得到的积分向量也越少,且此时的特征较少,识别率急剧下降,所以再增大角度间隔不利于特征的提取,已经没有意义。
另外,积分向量经过二维离散余弦变换后,本实验分别截取了5×5,10×10,15×15,20×20,25×25大小的特征矩阵,经过降维后用欧氏距离做分类识别。在旋转角度为15度时,不同大小的特征矩阵获得的识别率如表1所示。

表1 不同大小特征矩阵识别率
由表1所知,当截取的特征矩阵大小为15×15时,识别率为100%。如果截取的特征矩阵太小,无法包含图像的所有信息。从截取的特征矩阵大小来看,当特征矩阵过大时,它将包含大量冗余,使识别效果变差。所以在旋转间隔为15度、DCT变换后截取的特征矩阵为15×15时,识别率达到100%。
同时,本实验选择最佳参数来比较我们的算法与其他在手背静脉图像上算法的结果,结果如表2所示。

表2 不同算法下的识别率
PCA算法和LBP算法是基于局部特征的手背静脉图像识别方法,对参与训练和测试的手背静脉轮廓的位置相当高,所以识别率不高;SFIT算法虽然具有尺度变换、旋转、光照的不变性,在手背静脉图像上的识别率也相对较高,但是耗时长;在深度学习算法需要进行训练的大样本手背静脉图像,对本文的小样本没有很大的优势,旋转等问题对正确识别造成很大的影响。本文算法在特征提取和识别时,时间上远远少于其它算法,经过筛选最佳参数后,识别率大大增加。
4 结束语
针对手背静脉图像在亮度,旋转角度,尺寸等方面造成的影响,本文提出了一种基于多角度旋转积分图的手背静脉识别方法,并进行了参数优化。本文结合检测边缘性能的静脉图像梯度分割方法,选取最佳角度间隔做旋转积分运算获取几乎相同的积分向量,并通过二维离散余弦变换解决由于不同积分向量尺寸可能不一致所带来的影响,并截取最佳特征矩阵用于分类识别,识别率超过99.9%。接下来,扩大样本量并与其它算法进行融合将是进一步研究的重点工作。