太阳能风帆及其姿态角调整系统设计
2019-03-04,,,,
,,,,
(广州航海学院,广州 510725)
从国内外太阳能在船舶上的应用技术发展来看,太阳能在小型船舶上已取得成功运行的经验,但在大型船舶上的应用尚处于起步阶段[1-3]。水面无人艇做为一种新型化无人平台,与传统舰船相比,有着小型轻量反应快速、适应性强、船型丰富、推进方式多样、信息化智能化等优势,其推进方式可采用传统能源推进螺旋桨配合方向舵、喷水等方式,亦可采用全电力推进或利用太阳能、风能和海洋能等可再生能源推进[4-5]。但以结合太阳能发电和风帆助航为推进动力的无人艇尚未出现。本文以小型全自动水质采样无人艇为基础船,设计太阳能风帆推进系统(将太阳能电池板布置为传统的圆弧形翼帆形状[6-8],利用太阳能光伏发电电力推进螺旋桨和风帆助航)及其姿态角调整系统并搭建实验模型,对太阳能风帆的姿态角调整系统进行实验分析。
1 基本信息
选用目标船是SS30全自动采样无人船,见图1。

图1 加装太阳能风帆调整系统的SS30全自动采样无人船
1.1 目标船的基本信息
船体参数见表1。
1.2 太阳能风帆的基本信息
提高风帆节能效率的方法主要是通过改变风帆的帆型获得较好的空气动力学特性[9]。本船太阳能风帆采用剖面为圆弧型的硬质矩形帆,帆的圆弧形面覆盖一层硅基薄膜太阳能电池板,以满足风帆助航和接收太阳光的设计要求。根据工作原理和影响风帆空气动力学等因素,设计太阳能风帆具体参数见表2。

表1 目标船参数
1.3 太阳能风帆姿态角调整系统的设计
1.3.1 太阳能风帆姿态角水平驱动装置的设计
太阳能风帆姿态角水平驱动装置可以实现风帆在0°~90°间做倾斜运动,该装置整体结构见图2。

表2 太阳能风帆的参数
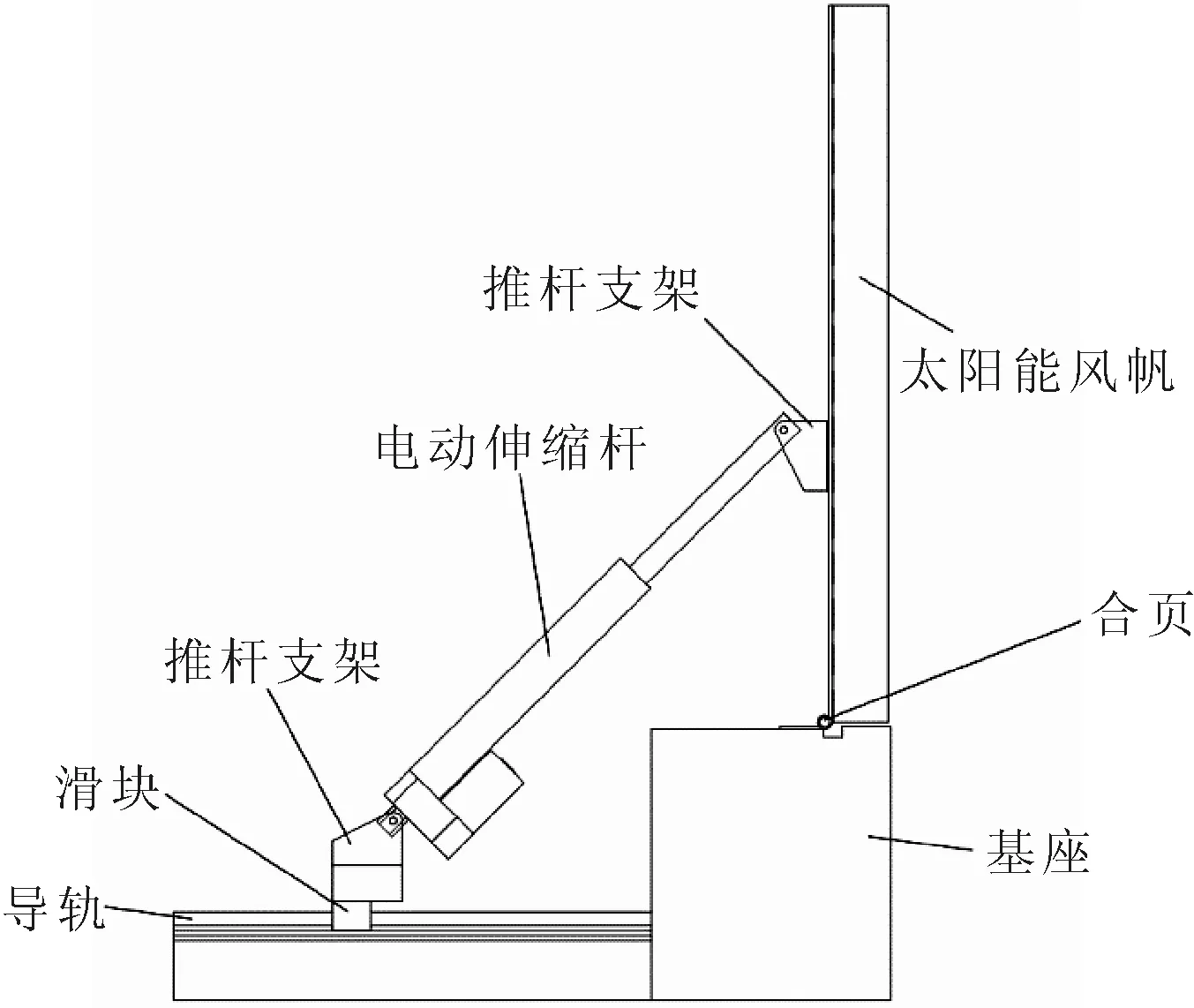
图2 太阳能姿态角水平驱动装置图
太阳能风帆通过合页与基座联接,导轨通过螺钉固定在基座上,伸缩推杆一端与推杆支架联接并一起固定在风帆的中心线上,伸缩推杆的另一端同样与推杆支架联接并一起固定在滑块上。
当太阳能风帆需要水平倾斜某一角度时,可通过滑块在导轨上的位置以及无线遥控器控制电动伸缩杆的推出长度来控制太阳能风帆倾斜的角度,滑块则通过锁紧手柄锁定在导轨的某一位置上,风帆便能锁定在0°~90°间的某一位置上。
1.3.2 太阳能风帆姿态角回转驱动装置
太阳能风帆姿态角回转驱动装置可以实现风帆绕竖直轴做360°旋转,装置整体结构见图3。
装置固定在位于船腔内的底板上,太阳能风帆固定在基座上。步进电机由控制器和驱动器控制,通过梅花联轴器与减速机相连接,步进电机和减速机均固定在底板上。减速机将步进电机的力放大后,同样通过梅花联轴器输出给回转轴,回转轴和基座通过胀紧套无键联接传动,为了使传动更加可靠、平稳,在减速机和机座之间增加一块盖板,卧式轴承座由螺栓螺母固定在盖板上,承受回转轴传动过程和风帆受到风力过程的径向力和一定的轴向力。全珠转盘安装位于盖板和基座之间,用于承受上部结构所受轴向力和一定的径向力。
当太阳能风帆需要回转某一角度时,通过控制器给步进电机驱动器发送指令信号,驱动器将脉冲信号放大后将信号传递到步进电机,步进电机根据控制指令转动设定的角度后锁定,此时回转轴与基座一起转动,风帆便会转动到某一角度。
为了验证设计的可行性,将装置模型置于湖中进行实验并采集相关数据,分析实验数据,提取综合有效功率最高的数据以确定太阳能风帆姿态角调整系统的最佳的姿态角,装置在此姿态角的状态下运行达到最大效率。
2 太阳能板的发电功率计算
太阳光以某一太阳高度角照射地球,辐射强度为I0,经过大气层后到达地球地表的辐射强度衰减为IDN,见图4。

图4 太阳直接辐射模型
到达地球表面衰减后的强度IDN为
(1)
式中:P为大气常数,通常取0.50~0.85。
辐射强度I0为
(2)
式中:n为时间,天。
太阳高度角h为
h=arcsin(sinφsinδ+cosφcosδcosΩ)
(3)
赤纬角δ为
δ=23.45°sin[360°×(384+n)/365°]
(4)
式中:n为时间,天;φ为当地纬度,北半球为正,南半球为负;Ω为时角,任一时刻所对应的时角为该时刻与正午的时间差(h)乘以15°,则北京时间任一时刻(24 h制)的时角计算公式为
Ω=15°(T-12)=
(5)
式中:T为任一时刻;Tbj为北京时间;L为当地经度;e为修正因子,
e=9.87sin(2ξ)-7.53cosξ-1.5sinξ
(6)
ξ=2π(n-81)/364
(7)
太阳能电池板接收的直射辐射强度IB为
IB=IDNcosi
(8)
cosi=sinδsinφcosγ-sinδcosφcosσ+
cosδcosφcosγcosσ+cosδsinφsinγcosΩcosσ+
cosδsinσsinγsinΩ
(9)
式中:i为太阳入射光线与太阳能电池板法线的夹角;γ为斜面倾斜角,σ为斜面方位角,见图5。

图5 阳光辐射帆面
风帆帆面太阳能电池板的发电功率P1为
P1=IDNcosiηFS[1-(t-25)×0.4%]
(10)
式中:η为太阳能电池板的光电转换效率;F为光伏系统的综合效率;S为太阳能电池板的面积;t为环境温度。
实验当天即n=137,11:00—14:00当地太阳能辐射强度数据,由公式(9)可以求得不同斜面倾斜角下的值,进而得出不同情况下的太阳能风帆上的电池板的发电功率,结果见表3。
从表3可知,太阳能风帆上的电池板的发电功率随斜面倾斜角的增大先增大后减小,即当太阳能风帆电池板面与太阳光接近垂直角度时的发电功率越大,且在15°是有最大值。另外,在12:00—14:00时间内的平均发电功率高于其他时刻,且在13:00—14:00时间内存在当天规定航线的最大发电功率,最大值为25.03 W。
3 风帆辅助航行推进功率数据
实际风速Vw是指来风相对地面的速度,也就是离开船舶在岸上观测到的风速和风向,与船舶航速Vs相等。相对风速也称表观风速V是指风帆实际所受到的风速,它是由实际风速和航行风速两者矢量成作用在风帆上,风帆的空气动力性能与相对风速有直接的关系。船舶航速与表观风速的夹角β为表观风向角,与风帆截面弦线之间的夹角α为攻角,帆弦线与船舶艏艉线之间的夹角θ为帆角,具体见图6。

表3 各变量环境下太阳能电池板的发电功率
注:Tbj为11:00时,I0=1 378.46 W·m-2,太阳高度角函数为0.92,IDN=1 155.25 W·m-2,η=0.17,F=0.72,S=0.18 m2;Tbj为12:00时,I0=1 378.46 W·m-2,太阳高度角函数为0.98,IDN=1 167.81 W·m-2,η=0.17,F=0.72,S=0.18 m2;Tbj为13:00时,I0=1 378.46 W·m-2,太阳高度角函数为0.99,IDN=1 169.76 W·m-2,η=0.17,F=0.72,S=0.18 m2;Tbj为14:00时,I0=1 378.46 W·m-2,太阳高度角函数为0.93,IDN=1 157.45 W·m-2,η=0.17,F=0.72,S=0.18 m2.

图6 太阳能风帆工作状态示意
由图6可知,相对风速V其与实际风速Vw和航行风速的大小Vs存在以下关系。
(11)
风帆推进功率P2及推力T的计算公式为
P2=TV0
(12)
(13)
式中:V0为航行风速,m/s;数值与船舶航速Vs相同;ρ为空气密度,根据当日气温取值为1.29 kg/m3;S为风帆受力面积,S=0.24 m2。
风帆的推力系数CT为
(14)
当帆翼的几何形状确定之后,升阻力系数主要由攻角α确定。当展弦λ=1.5,f=0.125时,由风洞试验得出的升力系数随攻角的变化数据见表4。

表4 各攻角下的升力系数
在实验中,控制船舶航速恒定Vs=0.7 m/s,实验数据采集情见表5、6。
可以看出,攻角在0°~20°时风帆的推力和推进效率呈上升趋势,在20°~90°时逐渐减小,且超过85°~90°时风帆的推力和推进效率接近于零甚至负数,即表现为阻力形式。太阳能风帆的攻角调整至20°时有最大推力和推进功率。
4 结论
通过多次修改设计方案,最终得出了一套针对目标无人船的太阳能风帆及其姿态角调整系统的装置,通过无线遥控的控制方法调整太阳能风帆的帆角,实现了太阳能风帆在目标无人船航行过程中对太阳能和风能的充分利用。太阳能风帆的电池板发电功率随斜面倾斜角的增大先增大后减小,即当太阳能风帆电池板面与太阳光接近垂直角度时的发电功率越大,且在15°时有最大值,实验时1天中最大发电功率为25.03 W。太阳能风帆的攻角调整至20°时有最大推力和推进功率。
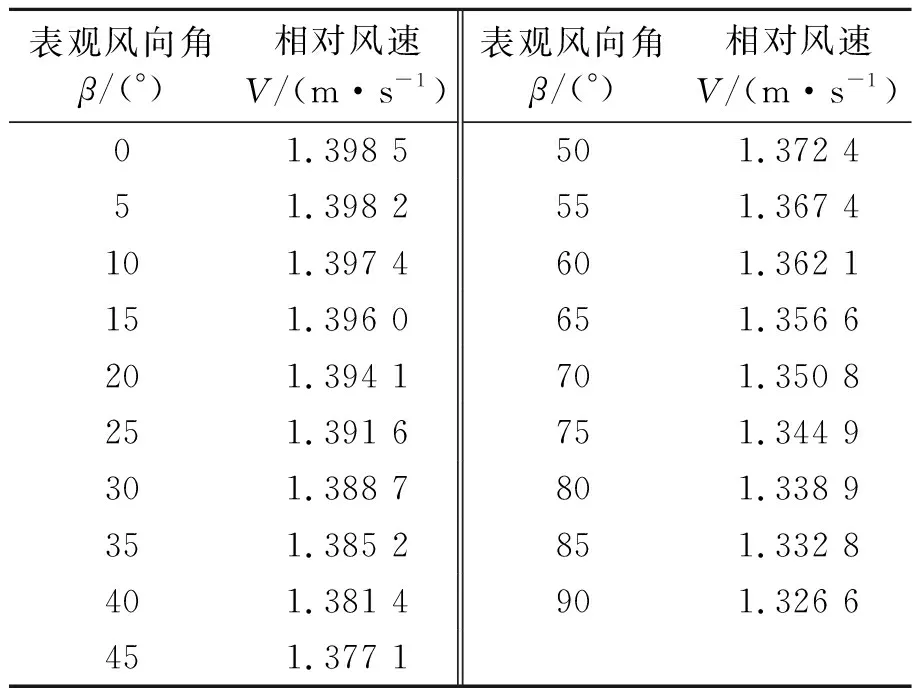
表5 各气流倾角和实际风速下的相对风速

表6 各攻角下的推力和推进功率
