ROSA机器人在神经外科手术中初步应用体会
2019-02-28刘元钦李翠玲张磊赵传东孙帅奇孙希炎张荣伟李博
刘元钦 李翠玲 张磊 赵传东 孙帅奇 孙希炎 张荣伟 李博
在神经外科疾病的诊治中,精准治疗已成为国内外专家的共识,目前应用较多的为神经导航系统与立体定向头架系统,但其各有缺点。ROSA机器人是新一代多功能手术机器人,被誉为神经外科医者手中的“达芬奇”机器人,不仅手术安全性好、精准度高、适应证广泛,而且可灵活设计手术入路[1-3]。山东省千佛山医院神经外科自2018年9月起引进省内首台ROSA机器人,开展ROSA机器人辅助下的神经外科手术,目前初步应用已完成各类手术14例,现报道如下。
一、资料与方法
1.一般资料:选取山东省千佛山医院神经外科自2018年9月至10月行ROSA机器人手术的患者14例,男性9例,女性5例,年龄范围25~70岁,年龄(41.2±10.2)岁。其中3例高血压脑出血患者均为基底节区出血,出血量约25 mL,术前GCS评分分别为8、10、11分,均合并不同程度肢体功能障碍;1例脑干出血患者为脑桥偏侧,出血量约5 mL,GCS评分6分;2例复发性胶质瘤患者,病理均示为胶质母细胞瘤,1例为颅内多发胶质母细胞瘤复发,1例为左颞叶原位复发,病程分别为3、9个月;3例脑深部海绵状血管瘤,分别位于顶叶及额叶,大小直径分别约为3.0、2.0、1.5 cm,均为癫痫发作起病;2例颅内深部病变患者,均为一侧胼胝体近脑室处占位,术前诊断不明确;2例脑积水患者,1例为脑外伤后继发脑积水,GCS评分9分,1例为脑动脉瘤栓塞后继发脑积水,GCS评分10分;1例帕金森病患者,双下肢不自主抖动病史8年余,口服美多巴效果差,帕金森病评定量表评分67分。
2.影像学检查:高血压脑出血、脑干出血、脑积水患者均在术中麻醉成功并固定头架后行颅脑CT检查;复发性胶质瘤、脑深部海绵状血管瘤及帕金森病患者术前先行薄层颅脑MR检查,术中麻醉成功后再行颅脑CT检查,并将颅脑MR与CT数据在ROSA机器人(Medtech公司,法国)自带系统中进行融合。
3.手术方法:不同病种采用的手术方法与手术体位不同,但均采用头架固定,尽可能预留多的手术操作空间及ROSA机器人操作空间,所有手术均采用ROSA机器人辅助。其中脑出血患者行钻孔引流术,均取仰卧位,设定穿刺通道穿刺点在中线额部旁开3 cm,靶点设定为血肿最大层面中心;脑干出血患者行穿刺引流术,将术前MR及CT数据导入ROSA计划系统融合并建立后颅窝穿刺针道;复发胶质母细胞瘤患者取仰卧位,术前设计4个穿刺通道共20个靶点进行射频热凝;深部海绵状血管瘤患者取仰卧位,采用直切口锁孔入路,面部激光注册并术中实时激光引导,定位精确;脑积水患者术前计划枕角穿刺至侧脑室额角;帕金森患者脑深部电刺激术(deep brain stimulation,DBS),将术前MR及CT导入ROSA计划系统中,设计目标双侧STN靶点及穿刺通道,先在局麻下植入2根电极,微电极记录系统采集震颤信号长度约6 mm,记录STN电信号,刺激确认效果后,在全麻下连接导线并埋置刺激器。
二、结果
1.手术结果:所有病例均顺利完成ROSA机器人辅助手术。3例脑出血穿刺引流患者采用面部激光扫描注册,平均误差0.8 mm;1例脑干出血穿刺引流患者采用头皮Mark注册,误差1.0 mm;2例复发胶质瘤射频热凝术患者以及3例脑深部海绵状血管瘤切除患者采用面部激光扫描注册,平均误差0.7 mm;2例颅内病变活检患者与2例脑室腹腔分流术患者采用骨性Mark注册,平均误差0.3 mm;1例帕金森病DBS术患者采用骨性Mark注册,误差0.3 mm。本组14例患者术后均达到预期治疗效果,无严重并发症发生。
2.典型病例:不同疾病需选择不同的注册方式及手术入路方式。
典型病例1:左侧基底节区出血患者,GCS评分10分,术中全麻成功后行术中CT检查并进行头皮Mark注册,注册误差为1.2 mm,设计额部穿刺点及穿刺通道,可明确避开脑沟,术后CT示置管位置精确(图1)。术后带管3 d血肿引流理想,恢复2周后出院进一步康复治疗。
典型病例2:脑干出血患者,GCS评分8分,术中全麻成功后给予头架固定行术中CT检查并进行头皮Mark注册,注册误差为1.1 mm,设计后枕旁正中处穿刺点及穿刺通道,术后CT示置管位置精确(图2)。
典型病例3:帕金森病患者,术前行薄层颅脑MR检查,术中行CT检查并进行颅骨Mark注册,注册误差为0.3 mm,利用ROSA将MR及CT数据进行融合并设计双侧STN靶点穿刺通道,行DBS手术,术中测试临床效果满意,术后复查颅脑CT示电极位置满意(图3)。
典型病例4:左额海绵状血管瘤患者,术中全麻成功后给予头架固定行术中CT检查并进行面部注册,注册误差为0.7 mm,术中全程激光引导,设定纵行小切口5 cm,成骨窗3 cm×3 cm,打开硬膜后发现皮层无明显异常,通过激光导航以最小损伤深入探查全切病变(图4)。
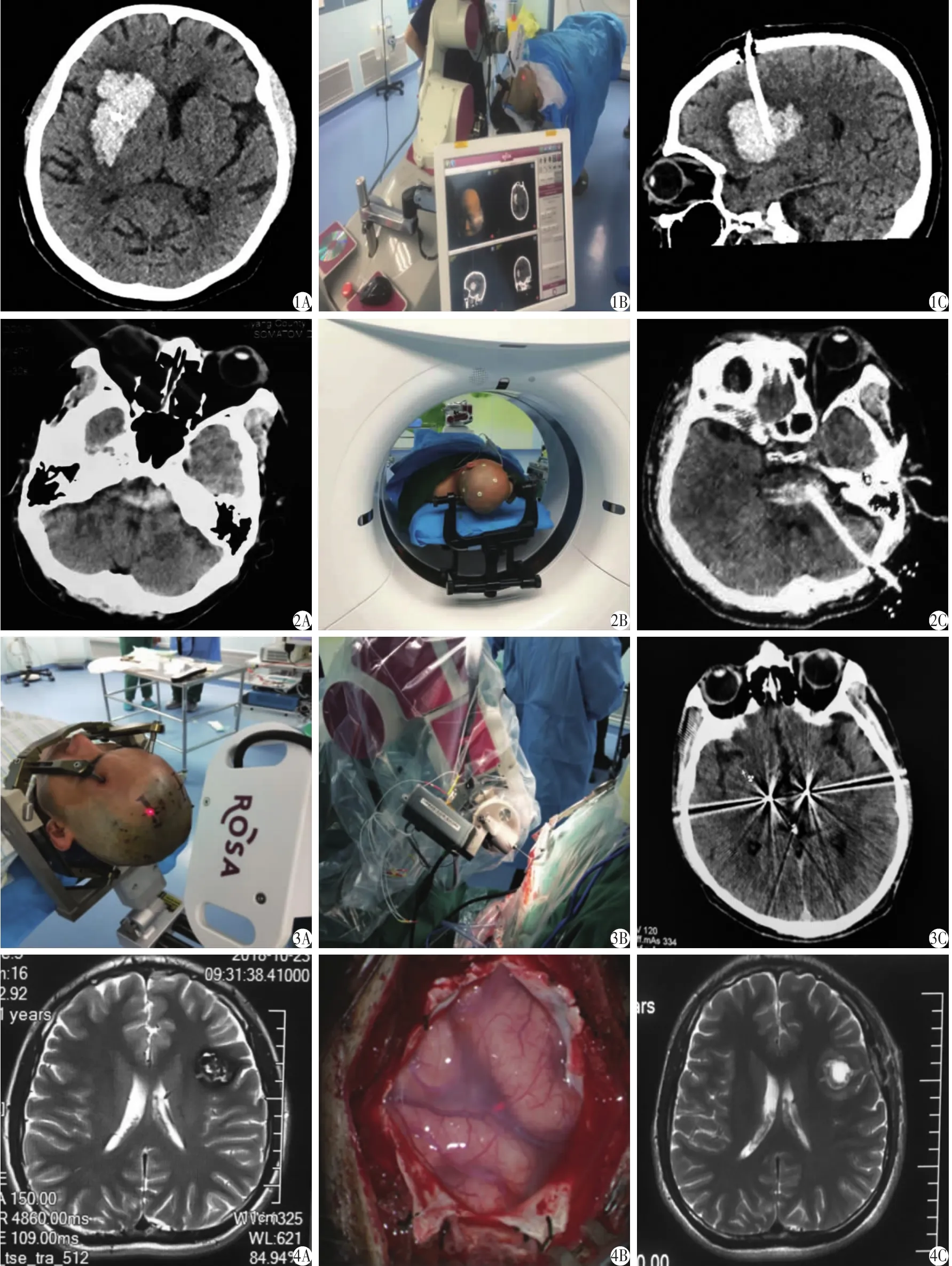
图1 左侧基底节区出血患者采用ROSA机器人辅助穿刺引流术的影像资料;图2脑干出血患者采用ROSA机器人辅助穿刺引流术的影像资料;图3帕金森病患者采用ROSA机器人辅助脑深部电刺激术的影像资料;图4左额海绵状血管瘤患者采用ROSA机器人辅助脑深部病变切除手术的影像资料
三、讨论
ROSA是新一代多功能手术机器人,自诞生以来就受到神经外科医者的青睐,被誉为神经外科界的“达芬奇”手术机器人[4,5]。我院功能神经外科团队在前期应用Leksell头架完成帕金森病、脑出血及活检等立体定向手术数千例,已积累了较成熟的立体定向手术经验,自引进ROSA机器人以来,完成本组各类手术14例,结合初步应用,体会到ROSA机器人在神经外科手术中具有独到且先进的优势。
(一)ROSA机器人在各神经外科手术中的应用
ROSA具备4种注册和配准方式 (体表标记点注册、颅骨植入标记点注册、框架标记点注册、无标记点的激光自动注册),术中可根据手术对精度的需要选择合适的注册模式,这是ROSA辅助下能够提高手术安全性、降低感染发生率和并发症发生率的原因[6]。国外学者已经在多种疾病治疗中探索出各种疾病的最佳注册方式,例如在精度要求最高的帕金森病DBS手术及癫痫SEEG手术,应用颅骨Mark标记精度可达到0.3 mm以内,SEEG手术可借助ROSA机器人术前计划系统设定多个针道,在保证手术精准度的同时能够大幅度缩短手术时间,对脑出血、脑室-腹腔分流手术等对精度要求不高的手术可选用头皮Mark或面部注册,注册时间较短,可节约手术时间[7-9]。对于颅内活检手术,ROSA亦可最大程度地发挥其功能,借助ROSA强大的影像处理功能将患者多种影像资料(如MR、CTA等)进行高质量融合,形成三维图像,能够在冠状面、矢状面以及水平面3个方向取得中心靶点,直观的根据靶点核团或病变形态、周围血管走行等设计个性化手术入路,手术更为精确且安全[10,11]。相较于传统神经导航技术,ROSA无需导航所用的附加器械,术前准备更简单,术中操作更容易,提前设定好手术靶点和手术路径后,机械臂可自行定位和穿刺;相较于传统Leksell框架手术,ROSA术前准备更简化,无需安装弧弓和其他部件及人工计算,可自动按照术前计划进行手术,避免调整坐标的繁冗操作,极大地简化了术前、术中操作时间,同时切口暴露时间减少,感染几率降低[12-14]。
笔者团队在掌握ROSA的基本原理及操作流程后,短期内完成ROSA机器人辅助手术14例,包含7个病种及术式,根据患者自身症状采用了3种不同的注册模式,记录其靶点误差,所有患者均达到预期治疗效果,无严重并发症发生。本研究发现基底节区脑出血穿刺引流术对穿刺靶点精度要求不高,而脑干出血对其体位和穿刺点精度要求高,更适合ROSA机器人辅助穿刺;对于脑积水腹腔分流手术,使用ROSA机器人定位能够一次性精准穿刺到位,避免了经验穿刺所致的潜在风险;对于皮层下小病变,ROSA可完全替代神经导航的功能,并且可一次性处理颅内多个病灶,方便安全。在此基础上,本研究还开展了2例ROSA机器人辅助引导下针对复发胶质母细胞瘤的射频热凝手术,目前在国内外文献中鲜有报道,术后复查MR后证实治疗有效,但远期效果有待进一步加强,由此笔者认为类似于多发复发脑胶质瘤或颅内多发脑转移瘤患者,在家属知情同意下,射频热凝可作为一种终末期治疗方案。
(二)ROSA机器人的不足与展望
随着干细胞研究的发展,应用ROSA机器人辅助干细胞移植以及3D化疗等均有着较好的前景。国外已有学者应用ROSA机器人行脊柱手术,国内因注册模块等原因暂无此项工作开展。后期联合复合手术室及ROSA机器人进行颅脑及脊柱手术必将成为精准手术的趋势。ROSA机器人的手术系统也存在不足之处,首先其对于开颅手术等操作空间相对受限,需后期进行优化改进;其次虽然ROSA机器人操作相对容易,但对于缺乏立体定向手术经验的年轻医者,其原理及操作过程需要进行连续集中的培训及训练。ROSA机器人的根本是精密严谨,任何细节上的忽视都有可能造成不可估量的后果。
综上所述,ROSA手术机器人真正实现了“半自动启动,全自动治疗”的机器人手术属性,实践了“精准医学”及“精准神经外科”理念[15]。今后团队将继续拓展ROSA机器人相关手术,相信随着科学技术的进步,机器人外科手术系统也将不断改进,其应用的广度和深度必将得到不断拓展。
