一种基于多传感系统协同测量的联合平差组网方法*
2019-02-26赵子越甘晓川马骊群
赵子越,甘晓川,马骊群
(中国航空工业集团公司北京长城计量测试技术研究所,北京 100095)
在大型装配制造业领域,测量任务的多样性、测量精度的高需求、测量范围的需求及测量现场条件的复杂性,使得传统的单一设备组成的测量网络难以满足测量指标要求,一种利用多传感系统协同测量的工作模式逐步成为研究热点,它是采用两种或两种以上的测量设备组成统一基准的坐标测量网络,以协同工作的模式完成现场复杂任务的测量需求[1-2]。这种多传感系统协同测量方法能够融合多种系统的优势,可以实时高效得完成多任务的测量需求,并且实现统一坐标基准的精度评价[3]。例如,在大部件装配测量的工作任务中,需要关注以下一个要点:部件关键控制点位精确测量、部件对接过程中位置与姿态实时监控、对接完成后关键曲面部件扫描测量[4]。这些要求难以通过单一系统独立完成,可行的思路是建立激光跟踪仪、室内GPS、激光扫描系统等多传感系统协同测量网络,融合多种系统的测量性能优势,以激光跟踪仪完成部件关键控制点的精确测量,以室内GPS完成部件位置姿态的实时监控测量,以激光扫描系统完成关键曲面部件的扫描测量。但是,这一解决思路的首要前提是建立多个系统的统一测量网络,即多系统协同测量的组网问题。目前,国内外针对这一问题进行了不同程度的研究。国外,波音公司利用激光跟踪仪与V-STARS系统组成协同测量网络,其中激光跟踪仪进行关键控制点的测量,而V-STARS系统以密集点云的形式测量波音787飞机外翼的外形轮廓,为飞机外形装配准确度检测和逆向重构提供了数据基础[5]。在国内,解放军工程大学的范百兴教授研究了激光跟踪仪与经纬仪的组网方法,在现场获得了应用[6];天津大学的邾继贵教授团队研究了多站位室内GPS的组网方法,达到了亚毫米的精度[7-8]。
测量精度是衡量测量网络性能的重要指标,高精度的组网方法是保证测量精度的有效手段。本文研究了一种基于多传感系统协同测量的联合平差组网方法,将现有的大尺寸测量系统进行梳理,以传感单元作为分类构建约束方程,形成一种通用的组网算法,为完成算法解算,采用了采用Levenberg-Marquardt 算法进行最优化求解,为保证迭代过程设计了合理的迭代初值求解方法。最终通过实验验证了组网方法的精度,并在工业现场中得到广泛应用。
1 多传感系统协同测量工作模式与基本原理
大尺寸测量系统按照传感单元不同可分为距离交汇系统、角度交汇系统及距离角度融合系统三种,常见的有激光跟踪仪、跟踪干涉仪、室内GPS、摄影测量系统等。多传感系统协同测量网络是将大尺寸测量系统连同一系列的几何基准如CAD 数模、基准尺、三维控制场等构成相对约束从而组合成为一个整体的测量网络,多种测量数据或标称数据相互融合,完成一组目标点的坐标精确测量。具体示意图如图1所示。
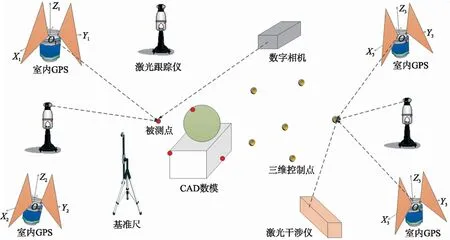
图1 多传感系统协同测量工作模式示意图
因此,该问题可描述为已知n台测量系统或站位测量m个公共点的测得值,求解n台测量系统或站位的位姿关系及m个公共点的精确坐标,其测量模型可以表示为h(P,C)=0,如图2所示。
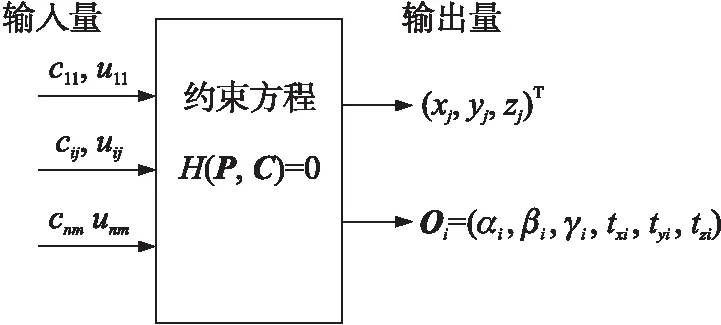
图2 多传感系统协同测量的组网模型
图2中,模型的输入量C由第i台仪器或站位对第j个公共点的测量值cij和其不确定度uij组成,其中i=1,2,3,…,n,j=1,2,3,…,m。测量值cij根据传感单元的不同既可能是坐标值,也可能是长度、角度等几何量,以激光跟踪仪为例,它的测量值是测量点的三维坐标,也可以是球坐标系下的距离、水平角和垂直角。模型中每台系统或站位测量的公共点的数目不一定相同,但是每个公共点至少应被两台系统或站位测量。输出量由m个公共点的坐标pj=(xj,yj,zj)T和n-1 台系统或站位的位姿参数(仪器坐标系到全局坐标系)Oi=(αi,βi,γi,txi,tyi,tzi)组成,当然还包括测量网络里的CAD数模、基准尺、三维控制场等的坐标。值得注意的是,对于距离测量仪器,如激光跟踪干涉仪,仅有 3个位置参数,即平移向量OIFMi=(txi,tyi,tzi);基准尺没有位姿参数。测量模型h={hij}=hij(P,C)由第i台仪器和第j个公共点构成的约束方程hij组成,其构建方法应予以重点研究。唯一确定公共点的坐标,需要至少3个约束方程;而唯一确定仪器位姿参数,需要至少9个约束方程。
综上所述,多传感系统协同测量组网问题是一个多目标优化问题,可以表示为:
find(pj,Oi)T,min{hij}
(1)
2 多传感系统协同测量组网算法
在多传感系统协同测量组网算法模型中,需要具体解决约束方程构建、求解算法选择、迭代初值获取三个具体问题。
2.1 约束方程构建
约束方程hij表征仪器测得值、公共点坐标及仪器位姿参数三者间的关系,可表示为:
(2)
2.1.1 基于距离角度融合系统
基于距离角度融合系统以激光跟踪仪和激光雷达为主要代表,通过测量水平角θ、垂直角φ和距离l完成测量坐标(x,y,z)T的测量。因此,其约束方程首先可表示为坐标约束方程,如式(3)所示;其次可以传感单元测得值的形式建立球坐标系约束方程,如式(4)所示。
(3)
(4)
式中:上标*是与仪器测量值对应的,是由公共点坐标和仪器或站位位姿关系反算而得的最优值。约束方程的表达形式和数目与测量仪器的类型和测量原理相关,式(3)是将坐标值作为统一整体进行优化,认为各方向的坐标分量对约束方程的贡献相同;但是,实际该类依照其测量原理其测量坐标的不确定度具有方向性,不确定度小的坐标分量对整体算法的约束性应该更强;因此,基于这种点位间距离的约束方程对整体算法优化应用具备一定的局限性。而式(4)则充分应用了测量原理和仪器各个传感单元的特点构建的约束方程,具有较强的适应性,并且这种约束方程的表达方式方便依照仪器各个传感单元的测量不确定度进行加权,因此基于相对约束控制的统一空间测量网络方法可以依照此模型构建约束方程。
2.1.2 基于距离交汇测量系统
该类测量系统以激光跟踪干涉仪为主要代表,由分布多站位干涉仪对同一测量点进行距离测量,利用多个距离交汇完成坐标解算,因此该类仪器根据传感单元可列以下形式的方程。
(5)
2.1.3 基于角度交汇测量系统
基于角度交汇的测量系统以室内GPS、经纬仪、摄影测量系统为主要代表,是观测空间点的水平角θ和垂直角φ,利用角度交汇原理测量,约束方程可列如下:
(6)
为了提高测量网络的测量精度,CAD数模、基准尺和三维控制场等几何标准是必不可少的。CAD数模提供公共点坐标的参考值;三维控制场由一组坐标精确已知的空间点组成,一般事先通过多站距离交会测量或其他测量方法进行标定,故既可此两类标准看作是一台仅输出坐标值的仪器,可建立如式(3)的坐标约束方程。基准尺可以是两端为测量点的实体长度标准件,可建立如(5)所示的约束每一个位置的基准尺均可建立一个长度约束方程。
多传感系统协同测量方法算法模型是一个多目标优化问题,需通过构建评价函数,将其转换为单目标优化问题。构建评价函数的方法有很多,如线性加权法、理想点法和平方和加权法等[9]。依照测量网络构建原理,可选择平方和加权法,评价函数如下式所示:
(7)
式中:W被称为权矩阵,表示各个约束方程的权值。以大尺寸测量系统的各个传感单元的测量值作为基本条件构建约束方程,使得测量值与约束方程的数目一一对应,因此测量值的优劣直接影响到了约束方程的权值。测得值的优劣体现为测得值的不确定度,不同仪器的不确定度不同,相同仪器的不同传感单元的不确定度也不同。在优化过程中,不确定度小的测得值对应的约束方程应优先被满足[10]。因此,约束方程hij的权值Wij可以表示为:
(8)
上式说明测得值cij的不确定度uij越小,约束方程hij的约束越强,对应的权值Wij越大;反之,测得值cij的不确定度uij越大,约束方程hij的约束越弱,对应的权值Wij越小。权值的确定依据可以依照仪器的手册或现场核查的测量不确定度结果。
2.2 优化求解算法选择
如式(7)所示的评价函数是非线性的函数,其优化求解属于非线性优化问题,常用的优化算法有:牛顿法、梯度下降法、共轭梯度法和Levenberg-Marquardt法。其中,Levenberg-Marquardt 法是介于牛顿法与梯度下降法之间的一种非线性优化方法,其鲁棒性好,对于过参数化问题不敏感,能有效处理冗余参数问题,使代价函数陷入局部极小值的机会大大减小[11-12]。因此,本文采用 Levenberg-Marquardt法求解算法模型。
2.3 优化初值的获取
由于Levenberg-Marquardt算法是一种迭代优化算法,故优化前,需要给出优化初值。充分接近全局极值点的迭代初值不仅可以避免优化陷入局部极值,而且可以提高算法的迭代效率[13]。因而,优化初值的选取是基于多传感系统协同测量的联合平差组网方法能够优化获得最优解的关键问题。
迭代初值主要包括系统或站位的位姿参数[R,T]和测量点的点位,其中测量点点位的初值较为容易获取,主要难点在于系统位姿参数,由以下矩阵表示。
(9)
式中:基于角度距离融合的系统,如激光跟踪仪等,可通过公共点转站的方法获取位姿参数;基于距离交汇的系统只有位置参数,没有姿态参数,也较为容易[14]。基于角度交汇的系统可采用后方交汇的原理
完成迭代初值求解,依据系统局部坐标系与全局坐标系的点一一对应并且对应点的连接射线交汇于一点来构建约束方程,示意图如下[15]。即测量系统局部坐标系下的点a,b,c与全局坐标系下的A,B,C是对应关系,其连线交汇于空间点S,可利用这一约束完成迭代初值求解。
飞行载荷实测是验证飞机结构完整性、完成新机定型必须进行的试验项目。飞机载荷测量主要方法有:应变法、压力法及其他成熟的方法,还可以使用加速度计、热测试设备及外挂外载荷测试。压力测量法不方便实施且耗费较高,通常采用应变电桥测量法来测量飞行载荷[1]。应变法主要思想是通过地面校准试验来建立应变电桥与加载载荷之间的对应关系(即载荷模型),飞行中将实测应变代入载荷模型,即可得到飞行实测载荷。
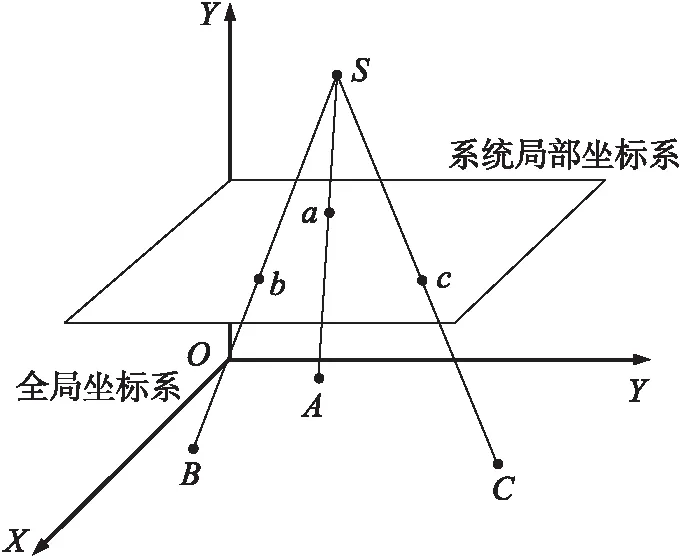
图3 基于后方交汇方法的迭代初值计算方法
角度交汇测量系统的观测量为水平角θ和垂直角φ,站位的原点与测量点j:(xj,yj,zj)T之间的射线的向量vj可以表示为:
vj=(vj1,vj2,vj3)T=(cosφjcosθj,cosφjsinθj,sinφj)T
(10)
根据角度交汇原理的系统数学模型,可得测量点j:(xj,yj,zj)T与位姿参数[R,T]的关系:
(11)
该方程中有12个未知量,每个测量点可提供2个方程,故需要至少6个测量点。因此,可将上式写成以下的矩阵形式:
AX=0
(12)
式中:矩阵
将未知量X分解为X9=[r1r2r3r4r5r6txtytz]T和X3=[r7r8r9T,则方程可写为:
BX9+CX3=0
(13)
根据正交矩阵的特性‖X3‖2=1,依照拉格朗日乘子法最优化方程可写为:
CR=‖BX9+CX3‖2+λ(‖X3‖2-1)
(14)
式中:λ为任意实数,将方程展开可以得到:
(15)
分别求CR求X9和X3的偏导函数,偏导函数值为0,方程为:
(16)
将方程组化简为:
(17)
式中:D=CTC-CTB(BTB)-1BTC,是个3×3的矩阵。X3是矩阵D的特征向量,从而解出X3,将X3代入第二方程即可解出X9,从而得到迭代初值。将迭代初值代入最终优化目标方程,即可计算最优解。
综上所述,通过完成算法基本模型设计,构建合理的约束方程,并对约束方程完成优化求解,通过设计合理的迭代初值求取方法完成迭代,最终实现多传感系统协同测量组网方法。
3 实验验证
为验证以上所述的组网方法的性能和精度,在工业现场某厂房设计了以下实验。该实验面向工业现场条件下某部件模拟对接的任务中的组网过程,考虑到现场的应用条件,采用激光跟踪仪和室内GPS组成协同测量网络,利用上节的方法进行优化解算得到所有激光跟踪仪和室内GPS的站位信息,可利用激光跟踪仪完成关键点位测量,室内GPS完成部件实时跟踪测量,实现两种仪器统一基准下的精确测量,可完成测量任务中的所有功能要求。实验现场如图4所示。
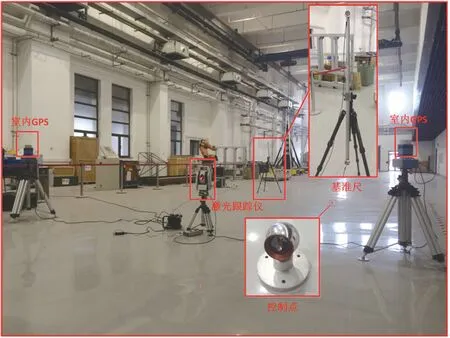
图4 现场条件下协同测量实验图
为了验证激光跟踪仪和室内GPS协同测量网络的精度,在12 m×12 m×2 m的工作区域内随机布置10根基准尺,要求基准尺包含水平竖直纵深各个方向,基准尺两端的距离参量作为标准值,通过测量基准尺两端点位坐标算出距离值,该距离值与标准值进行比较,以差值大小作为评价网络精度优劣的标准。具体比对结果如图5所示。
图5中包括3组数据,单独用室内GPS测量的比对结果、单独用激光跟踪仪的比对结果、室内GPS与激光跟踪仪协同测量的比对结果,以上的结果均是针对同一测量对象。由实验数据可以看出,单采用室内GPS测量误差优于±0.200 mm,单采用激光跟踪仪的测量误差优于±0.100 mm,采用协同测量手段的结果优于以上两种方法,数据显示其测量误差优于±0.06 mm。数据证明了协同组网的方法能够提高网络测量的精度,具有高精度和高效率的优点。
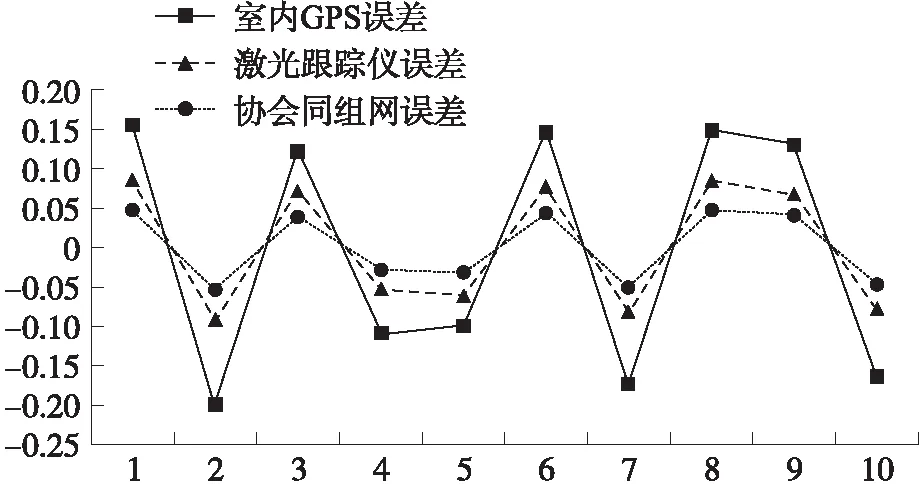
图5 精度对比结果
4 结论
在大型装配制造业中越来越依赖多传感系统协同测量网络,本文提出了一种基于联合平差原理的协同测量网络的组网方法。首先,介绍了多传感系统协同测量网络的工作背景和工作模式;然后,在介绍协同测量网络数学模型的基础上,设计组网优化算法,以传感单元的观测量为基础构建约束方程组,依照测量不确定度为每个约束方程赋予权值,采用Levenberg-Marquardt算法进行求解,并设计了合理的迭代初值计算方法;最后,在现场条件下进行了实验验证,采用多台室内GPS和激光跟踪仪组成协同测量网络,数据说明协同测量网络的误差小于±0.06 mm,具备很大的推广价值。特别说明的是,本工作仅就协同测量组网算法的实现过程和精度验证实验展开研讨,并获得了一定的进展。实际上,测量系统站位布局对测量精度的影响也是不可忽视的,在接下来的研究中,我们将致力于站位布局优化技术研究以进一步提供协同测量网络精度。
